异步电机转子轴位移的数学分析;临界转速或只是一个旋转的轨道轴?外文翻译资料
2022-09-03 22:59:56

英语原文共 22 页,剩余内容已隐藏,支付完成后下载完整资料
异步电机转子轴位移的数学分析;临界转速或只是一个旋转的轨道轴?
作者:美国.沃纳lowast;
Siemens AG, Industry Sector, Drive Technologies, Large Drives Industry, Vogelweiherstraszlig;e 1–15, 90441 Nuremberg, Germany
Received 29 January 2009, revised 5 May 2009, accepted 4 June 2009
Published online 7 July 2009
关键词:转子动力学,轴位移,轨迹,异步电机,偏心,套筒轴承
本文提出了一种异步机转子轴位移在不同类型转子偏心引起的数学分析。基于一个简化的转子模型,理论的连贯性之间的电磁,转子动力学,和滑动轴承的具体特征表现。转子的质量和轴颈的轨道的数学描述每种偏心和相对于两个虚拟固定传感器的轴位移导出。基于这一理论描述和数值算例,说明聚焦理论的转子动力学分析在计算振幅在两固定传感器的位置方向,可能会导致错误的结论关于共振的评价。本文的目的是,基于简化的转子模型,以展示数学相干对异步电机转子偏心和典型示范的必要性,不仅关注振幅相对固定传感器的位置,还要考虑计算的轨道半长轴和角位置。本文的目的并非是要取代详细的转子动力学有限元分析的简化分析模型预测实际转子轴振动。它的目的是为预备得出结论奠定基础,由一个简化的分析模型衍生而来深入到一个更加细致化的转子动力学模型–如转子动力学有限元模型–从而获得真正的轴位移更精确的理论分析。
- 介绍
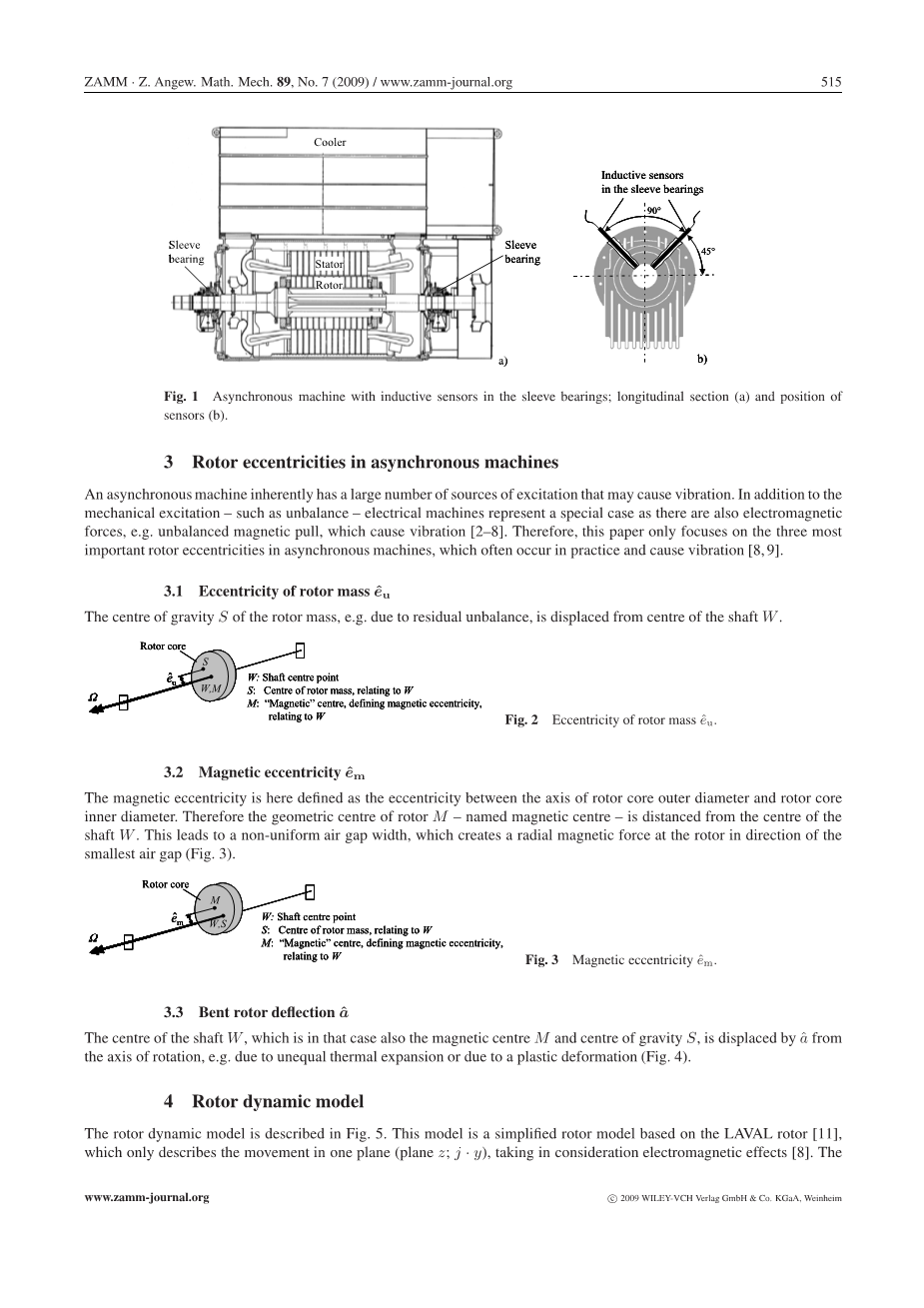
大型高速异步电机通常只能采用套筒轴承,因为轴颈的圆周速率很高。轴振动传感器通常用于套筒轴承来监测振动性态(图.1)。这些感应传感器测量传感器和旋转轴之间的位移。通常,每个轴承都要用到两个传感器,一个放置水平面轴90度的位置,另一个放置在45度的位置[1]。因此,这些传感器的位置也往往选择在实践的理论的转子动力学分析。计算出的轴位移,关于在套筒轴承中这两个传感器的位置,经常被用来分析振动性态和探测临界速度,但往往不考虑轨道形状和轨道轴的倾斜度。
- 本文的主旨
这篇文章的目的,一方面是为了得到轨道的数据描述,这是由最重要的异步电机转子偏心得出的,而另一方面,为了表明聚焦在只有两个位置固定的传感器的方向上的一个理论转子动力学分析,当分析共振时,可能会导致错误的结论。因此本文表明计算出的轨道形状和轨道轴的倾斜度—由半长轴、半短轴和半长轴的角位置描述—这应该被考虑到理论分析中去。为了表明这一点,一个简化的转子模型被选择。因此,本文的目的不是通过一个预测真实轴振动的简化的分析转子模型替换详细的有限元转子动力分析。其意图是为采用的结论依据做准备,来源于一个简化的分析模型,到一个更加详细的转子动力学模型—例如:有限元转子动力学模型——因此可以得到一个更加精确的实际轴位移的理论分析。
图.1套筒轴承上装有感应式传感器的异步电机(a)和传感器的安装位置(b)
- 异步电机中的转子偏心
异步机本身具有大量的激励源,可能引起振动。除了机械激励——如不平衡——电机代表一种特殊的情况,也存在有电磁力,例如:不平衡的磁拉力,会引起振动[2-8]。因此,本文仅仅专注于异步电机中三个最重要的转子偏心,那些经常发生在实践中并且导致振动的[8,9]。
3.1转子质量偏心e circ;u
转子质量重心S,例如,由于剩余不平衡,会从轴心W移位。
图.2转子质量偏心e circ;u
3.2磁偏心e circ;m
磁偏心在这里被定义为转子铁心外径和转子铁心内径之间的偏心率。因此转子的几何中心M——被称作磁力中心——是远离轴心W的。这会导致一个不均匀的空气间隙宽度,在最小空气间隙方向上产生一个径向的磁力作用在转子上(如图.3)。
图.3 磁偏心e circ;m
3.3
轴心W在某种情况下也是磁中心M和重力中心S,在这种情况下会由一个旋转轴代替,例如,由于不平等的热膨胀或由于塑性变形(如图.4)。
图.4转子弯曲扰度a circ;
- 转子动力学模型
转子动力学模型如图.5所描述,这个模型是一个基于LAVAL转子[11]的简化转子模型,只是用来描述平面上的运动(平面z; j · y),并且考虑电磁效应[8]。总的转子质量是集中在一个转子刚度c对称布置在两个相同的套筒轴承之间的弹性轴上,作为一个集总质量。转动惯量是不考虑的——因此既不考虑侧向压曲也不考虑任何陀螺效应。转子旋转角频率Omega;。点W描述了在异步电机的空气间隙中的轴中心点的运动。轴颈中心点V描述了轴颈在套筒轴承的运动。油膜的刚度和套筒轴承的阻尼是由油膜刚度矩阵CL和油膜阻尼矩阵DL描述的,其中包括关于套筒轴承的油膜刚度系数czz,czy,cyz,cyy和油膜阻尼系数dzz, dzy,dyz, dyy.假设有两个完全一样的轴承。附加刚度——轴承座,端盖,定子框架和机座[9]——此处不考虑,因为本文的关注点是显示数据的连贯性和基于简化转子模型得出的相应的结论,而不是为了得到一个全面的振动分析模型。通过求解雷诺兹微分方程[12],可以计算出油膜的刚度和阻尼系数。刚度和阻尼系数对转子的影响是众所周知的[11-15]。对于异步电机,转子和定子之间有一个电磁耦合,可以用磁力弹簧常数来描述。磁性弹簧常数具有负向反应。这意味着转子和定子之间的径向运动会产生一个电磁力,这可能会导致磁化运动[2–8]。在本文中,磁性弹簧常数被定义为是积极的,在磁力方向上起作用。电磁阻尼,会降低了磁弹簧系数的值,只考虑静态偏心。因此,静态磁弹簧常数cm,stat被用来计算静荷载挠度和静轴承力。对于动态分析,不要考虑磁场阻尼。动态磁性弹簧cm,dyn (= cm)因此被用来做动态分析[8]。
图.5 转子动力学模型
在模型中运用有两种固定的、复杂的坐标系统。第一种复杂的坐标系统(z0, j·y0)是定位在轴承壳中部点L处,也面向定子孔的中间。由于轴承中的水动力油膜,轴颈的中部V从L转移到位置P。因此,P是轴颈点V的静态位置。矢量rv,stat描述了轴颈点V的位置到轴颈点静态位置P,同时角度beta;L和向量rv描述了转子轴的静挠度,关于重力g和静磁拉力,也产生在水平方向上(y0-轴线)由于beta;L角。用矢量变换将所有的静态位移连接在一起,并在坐标系(z0, j·y0)中描述。所有的动态位移也联在一起,并在一个单独的设有原点O的坐标系统(z, j · y)中描述。在这个坐标系中,轴颈点(*表示矢量变换)的轨道可以有复向量rv表示。轴心轨迹的中心点可以有复向量rw表示。当转轴是刚性(c → infin;)时,虚拟点A描述了轴中心点W的轨迹。因此点A和W之间的位移描述了轴的动态弹性弯曲r circ;w,elast。三种不同类型的转子偏心——转子质量偏心e circ;u,磁偏心e circ;m和转轴弯曲acirc;——被叠加在同一个模型中。
图.6轴颈静态静止位置
5.数学描述
为了得到微分方程,将振动系统分解成转子质量系统和轴颈系统是有必要的(图.7)[8]。
对转子质量系统的力平衡的描述:
(1)
(2)
图.7振动系统分解成转子质量系统(a)和轴颈系统(b)
对轴颈系统的力平衡的描述:
通过几何相干
微分方程系统可以推导如下:
质量矩阵M,阻尼矩阵D,刚度矩阵C,和坐标矢量q,描述了轴颈点V*和轴的中心点W在复杂的坐标系(z, j · y)中的运动,表现如(7):
矢量f,用来描述激励矢量,被分解成每一个单一激励源的组成部分——指数u为转子质量偏心率,指数m为磁偏心率,指数a为转子弯曲扰度
组件可以描述为:
5.1自然振动
通过求齐次微分方程[8],可以计算自然振动。因此有必要做一个复杂的拟设。于是在本文中,更加复杂描述了齐次微分方程,并将其作为一个复向量 (划线=复值)。
一个复杂的假设包含有复特征值lambda;和复数特征向量q circ;h
特征方程的结果(12):
为了得到复特征值lambda;,确定方程必须解决:
这导致了一个第6级特征多项式:
通过这个多项式的数值解,n复杂特征值lambda;——和实部alpha;0,n,描述了每个自然振动的衰减和虚部,也描述了相应的自然角频率——可以被计算出。特征值的出现主要是共轭复杂
通过复杂特征值lambda;,复杂特征向量q circ;h,n,可以计算并得到解决的方案
复杂的常量kh,n,被用来考虑边界调节。通过计算实部alpha;0,n和虚部alpha;0,n,模态阻尼Dn,可以得到每一个单一的自然振动[10]
5.2强迫振动
非齐次方程的求解可以得到强迫振动。激励向量f被分解成单一的激励源—转子质量偏心矢量fu,磁偏心矢量fm,和转子弯曲扰度矢量fa
在本段中,指数kappa;被用于每个个别情况——指数kappa;=转子质量偏心u,指数kappa;=磁偏心m,指数kappa;=a转子弯曲扰度
kappa;=u,m,a. (19)
关于[11],每个激励向量可以分为一个正弦和一个余弦部分[8]
因此每个组件可以用[8]描述:
关于[11],每个单一激励的拟设
和矢量
每种情况下的矩阵方程的结果:
通过求解矩阵方程,振幅矢量q circ;kappa;, cos和q circ;kappa;, sin可以被估算并且非齐次方程的解可以被叠加
为了在一个复杂的坐标系(z; j · y)中转换,一个新的标志delta;被引出——指数delta;=w轴中心点W,指数delta;= v轴颈点V*
复杂矢量rdelta;,kappa;(delta; = w; v),描述了轴中心点W (delta; = w)和轴颈点V* (delta; = v)的运动,可以再复杂的坐标中描述出(z; jy)
随着振幅矢量q circ;kappa;, cos和q circ;kappa;, sin,复向量rdelta;,kappa;可以被描述为:
通过欧拉方程:
复向量rdelta;,kappa;变成:
于是关于[11],复向量rdelta;,kappa;,可以被描述成由两个旋转复杂的指针的叠加而成。一个指针在旋转方向(Omega; · t)上旋转长度r circ; delta;,kappa;,其他的指针在相反的
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[147427],资料为PDF文档或Word文档,PDF文档可免费转换为Word



