基于对重型车辆复线全动力液压制动系统外文翻译资料
2022-09-08 12:53:51

英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
基于对重型车辆复线全动力液压制动系统
摘要: 液压钳盘式制动系统与air-over-oil目前广泛采用重型车辆,这使得使用气压系统推进液压系统作用于制动摩擦板块划分和组合。但是还有一些缺点,如气动组件失败,粉尘污染, 在液压钳盘式制动系统中会产生大量的热量。此外,考虑到高速的要求,沉重的重量,重负荷和重型车辆的快速制动,全功率基于双管道进行重型车辆液压制动系统的设计和分析。完整的方案是电力液压制动系统,重型车辆triloculare缸由双重控制刹车阀,采用制动系统的全动力液压制动系统可以完成转向制动、停车制动和紧急制动,。此外,电子控制系统,负责协调液压制动器和液压制动系统的工作。对不同速度刹车的影响分析的基础上,由单元和连接管道对制动性能非线性数学模型建立了全动力液压制动系统。完成制动时间和制动压力在双线转向制动和停车制动的制动性能通过在Matlab / Simulin仿真实验进行了讨论,仿真结果证明转向制动和停车制动的制动性能符合全动力液压制动系统的设计要求。此外, 实验重车辆在制动系统的试验台上进行。实验数据证明了制动性能达到设计的目标, 基于双管道的完整的电力液压制动系统能有效提高制动性能,确保制动可靠性和重型车辆的安全。
关键词:重型车辆,全动力液压制动系统,双线刹车,triloculare缸、制动性能.
1 介绍
重型车辆目前广泛采用的是液压钳盘式制动系统空气过油(1 - 3)。制动器的气动元件系统很容易被腐蚀,在空气湿度大的条件下,会导致组件的死锁和整个刹车系统故障。此外,在制动盘制动系统被暴露于外,所以在一些严重的粉尘污染的工作场所,如在煤场和采石场,灰尘可以进入制动流体以引起相互运动制动活塞僵持和失败制动。最后重型车辆产生大量的热量导致密封组件故障,重复制动工作(4 - 5)的全动力液压制动系统已经广泛研究了它的可靠性和安全性。制动执行机构封闭和摩擦盘浸在油后采用全动力液压制动系统取消空气回路,,就能有效的解决这些问题(6 - 7)。
此外, 重型车辆已经被开发到高速度、重负荷和经常携带精密仪器的阶段。重型车辆的制动系统的可靠性、稳定性和可操作性上变得越来越重要。重型车辆使用的传统使用盘式制动器系统,适用于摩擦板作为制动执行机构分裂和合并不能满足的要求快速制动沉重车辆[8]。因此,充满电液压制动采用液压缸作为执行机构的制动系统是用于重型车辆,以提高性能开发的制动系统。为了减少制动器的反应,双管路制动系统在此被讨论使重型车辆能够实现这样的性能需求。这意味着制动液压压力是通过双管道液压油产生多个制动流量和制动压力来生成的。在车辆高速时,液压减速器提供制动转矩,当车辆处于低速时,液压缸来进行制动。它的优点之一是,它可以在低速时保证制动力矩,因为液压减速器的制动力矩将会随着车辆速度的减小而衰弱,并且在低车速时刹车磨损会变小。采用液压缸的制动不仅能保证制动在低速转矩,但也可以避免在高速时刹车的磨损盘磨损,因此制动器的使用寿命系统将延长(14 - 16)。
此外,微控制器有改善控制精度高的优点,从容模块化、数字化和信息和发展电液伺服控制系统可以改善重型车辆的制动性能(17)。它基于全功率液压系统研究的是对管道进行重型车辆控制的两倍电液伺服系统有实用的意义。
重型车辆的全动力液压制动系统本文设计采用双线刹车电液伺服系统控制的技术。它的制动液压缸有三室工作。它在同一时间的双线制动阀供应多个系统。它可以加快制动响应速度和满足的快速需求的服务来进行制动。可编程序逻辑控制器应用于液压制动器的协调任务和液压制动缸。仿真和实验证明了重型车辆进行设计方案的合理性。
论文的结构如下:第一节,重型汽车液压制动系统的现状是全动力液压制动和调查提出了于双管道系统。在第二节,全动力液压制动系统的组成描述。在第三节,完整的数学模型阐述电力液压制动系统,包括型号的刹车阀,阀控制制动缸和连接管道等。在第四节和第五节,一些仿真和试验台进行实验证明了制动性能可以达到的设计要求,最后,得出了一些结论。
2全动力液压制动系统
2.1全动力液压制动的组成系统
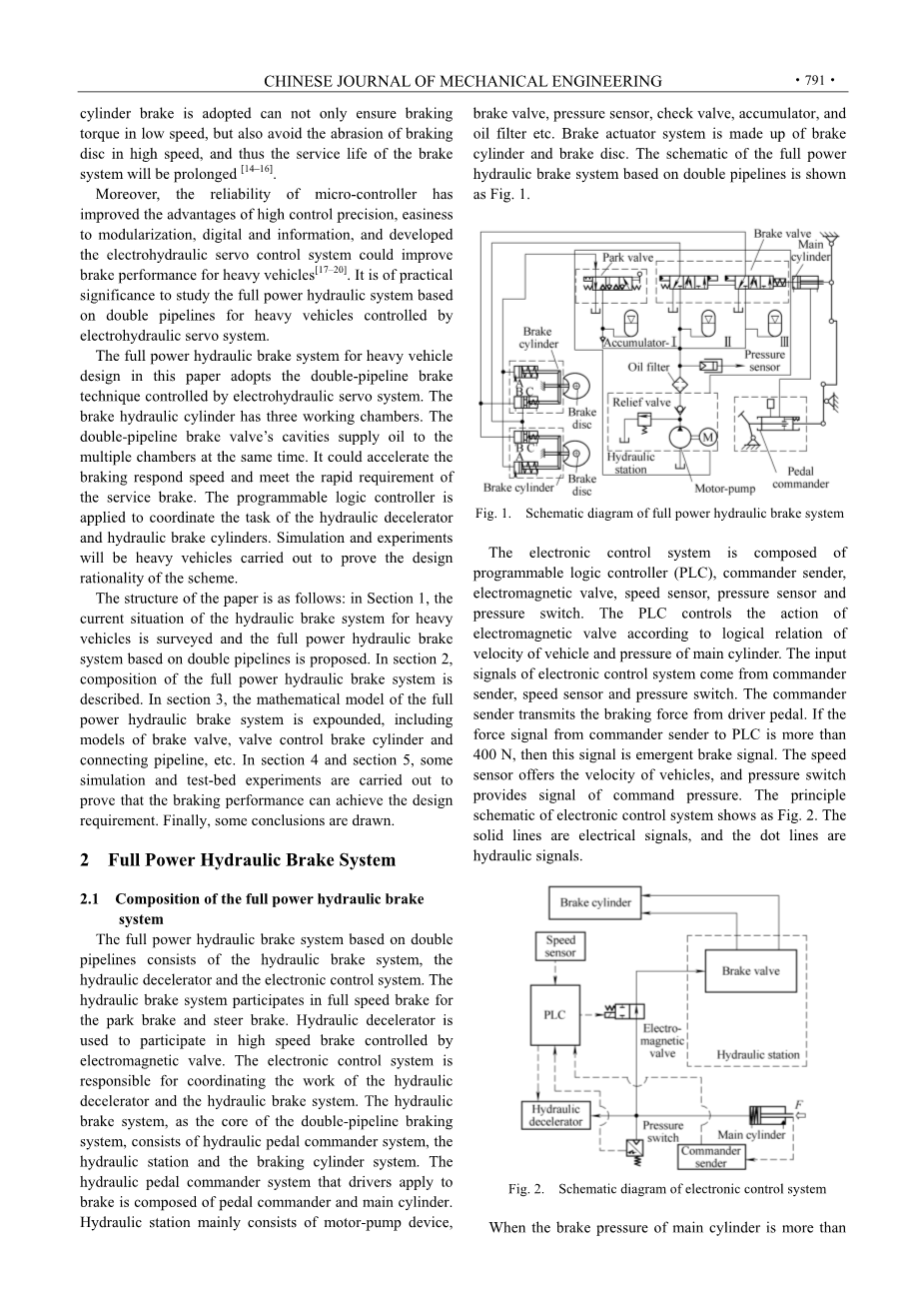
在全动力液压制动系统的基础上由液压制动系统增加一倍管道,液压制动器和电子控制系统。它的液压制动系统参与全速刹车的制动。液力减速器是参加高速制动控制的使用
电磁阀。电子控制系统是负责协调液压减速器和液压制动系统的工作。液压双线制动的制动系统为核心系统,它包括液压脚踏指挥官系统,液压站和制动缸系统。它的液压系统驱动程序适用于踏板指挥官刹车踏板。液压站主要由电泵装置,刹车阀、压力传感器、止回阀、蓄能器,油过滤器等组成。基于双管道液压制动系统全功率的示意图如图1所示。
图1所示。全动力液压制动系统的原理图
电子控制系统组成可编程序逻辑控制器(PLC),指挥官发送者,电磁阀、速度传感器、压力传感器和压力开关。PLC控制的作用电磁阀根据逻辑关系车辆速度和主缸的压力。输入电子控制系统的信号,速度传感器和压力开关来自指挥官发送者。指挥官发送者传送的制动力驱动踏板。如果信号比发送方司令PLC多400 N,那么这个信号是紧急制动信号。它的速度传感器给车辆的速度和压力开关提供命令压力信号。图2所示的实线是电信号,点线液压信号。
图2所示。电子控制系统的原理图
当制动主缸的压力超过设定值的压力时,如果信号是紧急刹车信号,那么PLC传输电磁阀的信号打开和主缸油压刹车阀开启来控制刹车的制动缸。,主要的信号命令缸不是紧急制动时,从速度传感器是汽车的速度读到PLC。当速度超过设置值的速度,电磁阀关闭,主缸不能进行油压刹车阀和刹车气缸的动作。另一方面,当速度小于设定值,电磁阀打开和主缸油压刹车阀和制动缸采取行动。所有信号传感器是数字数据。
车辆速度和电磁阀的逻辑关系的工作油压力高于18 MPa时,油泵将立即关闭。工作模式可以提高使用寿命和电泵的工作效率。
两个triloculare圆柱体,有三个工作室在制动系统中使用。室A是工作为公园制动室,室B和C室室工作了转向制动器。车辆开始刹车之前的的时候,刹车系统提供压力油室制动释放压力油。当车辆需要刹车时,压力油将返回油箱和主要的刹车系统。
当车辆需要刹车时,压力油同时提供给室B和C室。PLC收集车速信号和制动力指挥官发送方发送的信号,然后制动缸通过液力减速器的逻辑控制和坐标完成制动。制动缸的控制系统采用的力量反馈双线制动阀制动。当制动主缸的压力低于3.5MPa, PLC把信号送给压力开关,设置“关闭”,液力减速器工作和石油供应的压力制动缸用来消除其差距和准备服务制动。当制动主缸的压力大于3.5 MPa, PLC信号给压力开关设置为“开启”,双线制动阀逆转,两个管道供应石油triloculare cylinder在同时使其快速响应、平衡两个刹车蓄压器压力回路,从而减少制动阀的开放时间。
3制动系统的数学模型
3.1数学模型的闸阀
卷闸阀连接和远程从驾驶操作踏板控制的指挥官。用于制动阀的数学模型也是与前一个相同
[21]。制动阀的运动方程是
x轴位移,zeta;阻尼比,nomega;是线轴的自然角频率
3.2阀控制制动缸的数学模型
双线刹车阀在这个系统中简化为三向阀的中间位置用以保持系统关系密切压力。制动缸是单杆气缸。根据圆柱的流动方程,负载流量连续性方程和加载力平衡方程如下:
l是负载流量,pl是负载压力,K问流量增加,Kc是流动压系数,Xv轴位移,C是每个阀口流量系数,Ve是总体积的流体室、beta;e是有效体积弹性系统模量有效截面面积,Y是制动缸活塞位移,mt是等价的质量,Bt是负载阻尼系数Kt负载弹簧刚度,F是摩擦。
从方程式。(2)-(4),输出的总收缩油缸的位移函数这两个假脱机输入位移和外部摩擦
Kce总流动压系数,xi;h是阻尼比,omega;h是活塞的固有频率
F是摩擦和视为干扰值,让u1v,u2= Fl,Y = X1,1 2X = X,2 3X = X。因此,国家液压制动系统方程如下:
3.3数学模型的连接管道
数学模型的连接管道广泛应用于金属连接管道制动系统,因此管道影响制动完成时间和制动性能不能在刹车时被忽略。在过去的研究中,连接管道的压力和流量损失完全被忽视。制动阀是等价的直接接到制动缸,但显然不同的事实是刹车阀和制动缸之间的驾驶轮之间有近十米的距离。因此建立了制动系统的性能连接管道的数学模型研究具有重要意义。
由于液压油的可压缩性,压力和流动的连接管道的两端等价的。制动液压油流动的越快,越
压力损失。尤其是在小流量情况下,几何尺寸的管道连接主刹车与制动缸和制动缸阀和闸阀
有相对较大的影响。之间的管道刹车阀和制动缸为研究对象,在流方程没有抢劫室可以表为q
一个流出口的管道,是吗一个是部分区域的管道,液压油的密度rho;,l一个管道的长度,pav和p一个在进口和出口处标压力管道,r一个是管道半径,nu;是石油粘度。
考虑到液压油的可压缩性,流方程在连接管道
av管道输入流。
3.4数学模型的蓄电池
三个蓄电池分别提供压力停车制动和转向制动器。在他们中间accumulator-Ⅰis连接到停车室刹车,accumulator-Ⅱaccumulator-Ⅲ连接到转向制动器室C和B室。泵供应蓄能器的油压
18 MPa。但是每个刹车会使压力下降到蓄能器的压力低于13 MPa,然后油泵将开始供应石油的蓄电池。当工作油压高于18 MPa,石油泵将立即关闭。
蓄电池的运动方程如下:
p交流是蓄电池的出口压力, 1是流动的制动阀,Ke是累加器的弹性系数,l是累加器活塞的位移,omega;一个是累加器的固有频率,xi;是一个蓄电池的阻尼比,R是液体电阻A是一个天然气压缩系数,1是有效的部分区域的连接管道。
3.5数学模型的制动时间
有效的蓄电池的体积方程
所以压力减少蓄电池的制动为
蓄电池简化为一个孔的插座和累加器的制动时间启动为
V是蓄电池的有效容积,A0是有效的位移累加器,p0是通货膨胀蓄能器的压力,p1是蓄电池压力的减少量,p2是在蓄电池最大压力,C是流量系数,0是蓄电池出口领域。
4制动系统的性能仿真
根据全动力液压制动的设计要求,转向制动器的制动完成时间应控制在0.3 s。基于Matlab / Simulink的仿真模型,全动力液压制动系统转向和刹车停车制动验证双线制动器的合理性方案是建立在这篇文章中的,仿真模型如图3所示图4所示。仿真参数如表2所示。
图3所示。转向制动系统的仿真模型
图4所示。停车制动系统的仿真模型
- 转向制动器的模拟结果显示为图5所示。从模拟结果中可以知道完成制动转向制动器,制动缸时到达最大位移的时间是0.25秒,模拟的结果停车制动如图6所示。从模拟结果可知,停车制动的制动完成时间以及什么时候制动缸达到最大位移,此外,制动压力波动和流量变化是有规律的。这些模拟结果刹车可以实现制动可靠,满足设计性能要求。它证明了双线刹车系统方案是合理的。
5对制动性能试验台实验
基于双管道全功率刹车系统如图1所示,采用高性能的电脑控制来实现全数字压力、速度的闭环抽样,闭环算法和保护功能的参数的试验台。系统油压为18.0 MPa,主要制动缸输出指挥官的压力为2.5 MPa,通货膨胀压力为11.0 MPa,蓄电池采样周期是1毫秒。基于双管道显示为转向制动器的实验曲线图7所示。 刹车的曲线提出了压力室B和室C,因为高压之间的区别,液压缸室和蓄电池当提供压力油室B和室C转向制动器的压力波动很大。但是,当制动缸达到最大位移时,如图7所示(d),压力波动是稳定的。当电泵启动时,连续转向制动时间,压力蓄电池从18 MPa减少到 13 MPa,如图7所示(c)。实验停车制动曲线如图8所示。在压力室下降,流动常数值不变。在图8中(a),在室的压力在0.3秒降低为零,所以重型车辆在0.3秒内停车制动。试验台的结果是一致的与仿真结果。这项研究提供了基础选择控制算法,刹车配置和制动参数。
6 结论
(1)基于全动力液压制动系统双管道设计和分析来满足需求的高速、重量、重负荷和对重型车辆快速制动。
(2)全动力液压制动系统的方案是由双刹车阀triloculare缸控制采用的制动系统,可以完成转向制动器、停车制动和紧急制动。
(3)电子控制系统为不同速度刹车液压制动器和协调工作液压制动系统开发。
(4)基于Matlab / Simulink的仿真实验的双线讨论为转向制动和停车制动。已经建立了一个非线性数学模型全动力液压制动系统。
(5)制动系统试验台实验的沉重车辆进行,实验数据证明制动性能能达到设计需求,有效地提高制动性能,确保重型车辆的制动可靠性和安全性。
引用
[1] HULTEN J. Some drum brake squeal mechanisms[J]. SAE Paper,
951280, 1995: 2 181–2 192.
[2] YAO Shouwen, YAN Qingdong, XIANG Changle. The simulation
research of blend brake system on some heavy vehicle[J]. Vehicle amp;
Power Technology, 2003(4): 46–49. (in Chinese)
[3] LU Yifei,
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[146303],资料为PDF文档或Word文档,PDF文档可免费转换为Word



