面向某型自主水下航行器的水面控制系统设计毕业论文
2020-04-05 11:04:35
摘 要
自航模是一种类似于潜艇外观与操纵模式,同时类似于AUV的控制方式的一种特殊的自主水下无人航行器。其在军事、海洋调查、资源勘探、海底施工等领域具有重要的意义。
本文研究课题是按照真实潜艇按1:3比例缩放的一种水下自主航行器,具有与真实潜艇十分相似的外形,能进行高速航行并具有较大的惯性。为实现自航模上各关键设备的协调工作;遥控航行进入试验场地;自主航行完成航行试验;实时监控自航模的航行姿态与工作状态;保证自航模安全航行等重要功能。本课题针对该型号自航模,研制出了一套水面控制系统,包括一套水上主控软件和运行该软件的硬件设备,以保障自航模稳定可靠的完成潜艇操作试验。
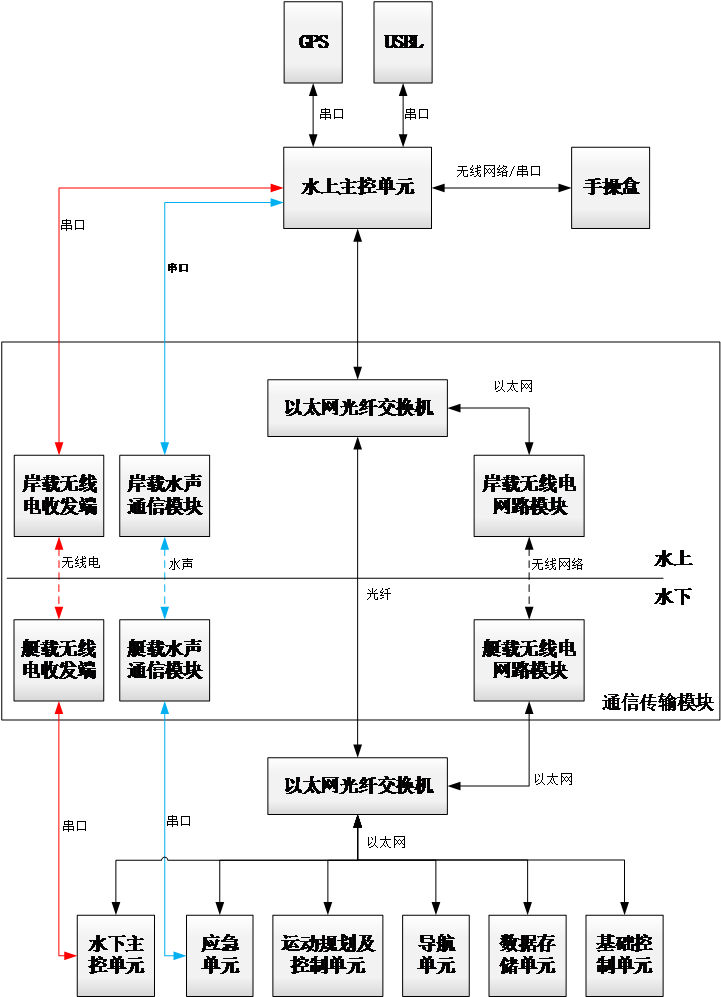
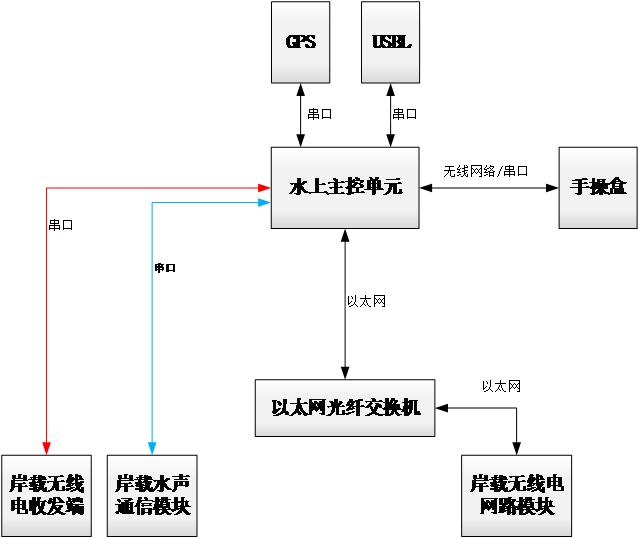
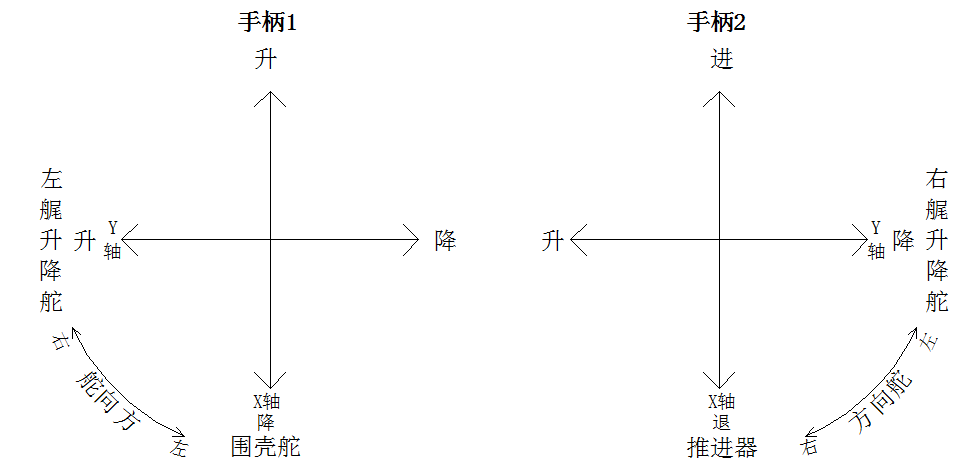
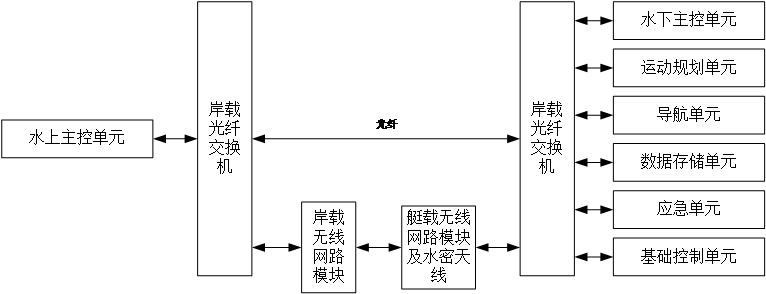
本文主要内容包括以下几个部分,第一,介绍了目前国内外对自主水下航行器和远程监控系统的研究现状。第二,介绍了大尺度高航速自航模控制系统的整体设计方案,主要包括水面控制系统和艇载控制系统的方案设计。第三,详细阐述了水面控制系统的硬件组成,关键设备的选型和技术要求。其中系统的硬件由手操盒、水上主控工控机、无线电通信设备、光纤和无线网路通信设备、水声通信设备几个部分组成。第四,分析了软件的设计需求,开发了自航模水上主控单元软件。软件包括参数配置模块、遥控模块、任务预置模块、通信模块、状态显示模块。实现了接收并解析手操盒信息;其他单元控制住指令的接收和下发;设备工作状态显示;通信协议的制定以及任务预制功能。最后对软件各功能模块进行测试与改进。
在论文总结部分,概括总结了本文所做的工作,并指出了当前工作的不足以及后续工作的展望。
关键词:自主水下机器人;水下无人艇;监控系统;C#软件模块化设计
Abstract
The self-propelled model is a special Autonomous Underwater Unmanned Vehicle, similar to the appearance and operate mode of the submarine, and similar to the control mode of AUV. It has great significance in military, Marine investigation, resource exploration, seabed construction and other fields.
The subject of this study is in accordance with the real submarine by 1:3 proportion scaling of an Autonomous Underwater Vehicle. It has very similar appearance with real submarine. And the self-propelled model can perform high-speed and has great inertia. In order to realize the coordination of all key equipment on the model; Remote navigation into the test site; To complete the voyage test by autonomous navigation; Real-time monitoring of navigation attitude and working status of self-propelled model; To ensure the safe navigation of the model and other important functions. This topic for this model from the model aircraft, developed a set of the water control system, including a water main control software and hardware to run this software, in order to ensure the complete operation test of submarine model aircraft is stable and reliable.
The main contents of this paper include the following parts. Firstly, the current research status of autonomous underwater vehicle and remote monitoring system is introduced. Secondly, this paper introduces the overall scheme of large scale high speed self-model control system, which mainly includes the surface control system and the plan design of the boat load control system. Thirdly, the hardware composition of surface control system and the selection and technical requirements of key equipment are described in detail. The hardware of the system consists of hand-operated box, water master control machine, radio communication equipment, optical fiber and wireless network communication equipment and underwater acoustic communication equipment. Fourthly, analyze the design requirements of software, and develop the software of water master control unit. The software includes parameter configuration module, remote control module, task preset module, communication module and status display module. It realizes receiving and parsing manual box information; Other units control the receiving and issuing of instructions; Display the working status of the equipment; The development of communication protocol and the function of task prefabrication. Finally, the software functional modules are tested and improved.
In the summary of the thesis, the paper summarizes the work done in this paper, and points out the shortcoming of the current work and the prospect of the follow-up work.
Key Words:Autonomous underwater robots; Underwater unmanned craft; Monitoring system; C# software modular design
目 录
摘 要 I
Abstract II
第1章 绪论 1
1.1课题研究的背景及意义 1
1.2国内外研究现状 1
1.2.1自主水下航行器的国内外研究现状 2
1.2.2远程监控系统国内外研究现状 4
1.3本文主要研究内容和结构安排 6
第2章自航模控制系统概述 7
2.1 自航模控制系统概述 7
2.2 自航模控制系统要求 7
2.3自航模控制系统结构与组成 8
2.4 本章小结 8
第3章 水面控制系统的组成及功能 10
3.1系统硬件结构 10
3.2 关键设备选型 10
3.2.1 手操盒硬件选型 10
3.2.2 水上主控工控机选型 13
3.2.3 光纤及无线网络设备硬件选型 14
3.2.4 无线电通信设备硬件选型 16
3.2.5 水声通信设备硬件选型 17
3.3 监控台设计 19
3.4 本章小结 20
第4章 水面控制系统软件设计 21
4.1 软件开发环境 21
4.1 水面控制系统需求分析 21
4.3 水面控制系统子模块设计 22
4.4 水面控制系统子模块软件具体实现 23
4.4.1 参数配置模块 25
4.4.2 遥控模块 29
4.4.3 任务预置模块 31
4.4.4 通信模块 32
4.4.5 状态显示模块 33
4.5关键技术 36
4.5.1 制定通信协议 36
4.5.2 循环冗余校验 37
4.6 本章小结 38
第5章 水面控制系统的调试 39
5.1 软件调试标准及环境 39
5.2 调试方案 39
5.3 调试结果 40
5.4 本章小结 42
第6章 总结与展望 43
参考文献 44
致 谢 45
第1章 绪论
1.1课题研究的背景及意义
课题来源于中船重工某研究所的条件建设项目,该项目自主研发了1:3大尺度高航速水下自航模,为进行某型号设计实验中的多项试验提供试验平台。本课题主要承担大尺度高航速自航模的控制系统设计项目,本文主要进行大尺度高航速自航模的水面控制系统的研究与设计。
作为海洋战争中最隐蔽最危险的海洋刺客,潜艇虽然在海军历史上服役的时间不长,但由于其具有突发攻击能力强 、生命力强,同时隐蔽性好的优点,因此成为捍卫我国海洋权益的有效武器。当今时代对潜艇提出了航速更高、机动性更好、噪音更小和稳定性更高的要求,与此同时还要进一步提高潜艇的信息化水平以及多种有效负载协同作战的能力。此外,对于潜艇的外形结构、推进动力、武器装备和探测设备等一系列方面急需创新发展。但是新型设备从设计到应用需要进行大量的试验,并且需要极高的实验成本还存在一定的危险性。为改变当前传统的试验方法和试验思路,形成一套完备的潜艇研制体系,提高新型号潜艇在战争中具有更高的隐蔽性和安全性,加快研究成果向实际制造的转化,搭建潜艇新型技术试验平台是一项值得大力发展的新技术。
无人航行器与有人航行器相比,具有无需人员下水,续航能力强、训练维修成本较低等众多优势。自20世纪50年代世界各国开始研制无人水下航行器代替潜水员下海完成海洋环境探测、海底矿产资源开发等海洋科学的研究。根据无人水下航行器的自主等级,可以分为遥控无人水下航行器(ROV)和自主水下无人航行器(AUV)两类[1]。其中AUV与ROV相比,其不受遥控线缆的限制,所以有着更大的活动范围。
此外,自航模是按照潜艇真实型线,按一定比例缩小制作的带有舵、螺旋桨和动力的无人自主水下航行器模型。自航模几何外形、重心位置和质量分布与实际潜艇相似,并且可以模拟实际潜艇在海洋中的非线性耦合运动等特殊情况下的机动航行。
本文设计的水面监控系统是大尺度高航速水下自航模的重要部分,由手操盒和水上主控单元等设备组成,能完成水面控制系统和艇载控制系统之间准确有效的通信调度功能。从而实现对自航模的远程操控、航迹预制、以及设备状态显示的功能。目前现有的监控系统所监控的参数较为简单并且通信方式单一。针对上述不足,本课题开发一套基于Visual Studio 2010平台的水面控制系统。进而提高了水面控制系统的智能性、稳定性和可靠性。因此,本课题研究基于大尺度高航速水下自航模的水上控制系统具有重要意义。
1.2国内外研究现状
1.2.1自主水下航行器的国内外研究现状
海军是一个国家极为重要的战略力量,肩负着保卫国家海洋安全的任务。早在19世纪,美国海军战略家马汉提出了:“谁控制了海洋,谁就控制了世界[2]。”的理论。由此可见,一支海军的强弱直接体现了对海洋的控制能力,对一国的发展起着决定性影响。随着当今时代的不断发展,无人武器争锋之势愈演愈烈。其中自主水下航行器作为一种高新设备,已经成为世界各国研究的热点。
人类对海洋环境的探索已经有几十年,并且有了一定的技术积累,但是大部分都掌握在西方国家手中,无论是在水下航行器的作业的深度和宽度上都又非常大的突破[3]。进入21世纪以来,世界各国都在不断加强海军的发展。目前为止1000余艘各种用途的水下无人航行器已被10多个国家投入使用。其中美国的军用无人航行器在导航精度、自主化水平和水声通信等技术一直处于世界领先水平。并且在上世纪90年代就制定了无人航行器的发展计划。美军在研究和服役的航行器已经覆盖各种动力类型和排水量,用于反水雷、海洋环境调查、情报侦查等任务。其中,现今正在服役的典型型号有SMCM、SAHRV、BPAUV等。此外,美国WHOI的ABE AUV的最大潜浮深度能达到6000m,最大航行速度为2kn[4]。可以脱离母船长时间在海底执行科考任务。而且美国十分注重高校在该方面的研究,主要的有麻省理工的Odyssey系列,亚特兰大大学的Ocean voyagerⅡ等型号。

图1.1 麻省理工的Odyssey

图1.2 美国ABE AUV
我国对自主水下航行器的研究起步晚于其他国家,但发展速度很快。大部分研究由高校和研究所承担,主要为上海交通大学、华中科技大学、哈尔滨工程大学、中科院沈阳自动化研究所和中船重工下属研究所。
1994年我国“探索号”水下自主机器人研制成功,其水下作业深度可达1000m,活动半径可达23公里[5],能够完成在指定范围搜索目标的任务,并且可以对目标进行观测,能够自动避开障碍,同时具有水声通信能力,将所需图像和数据上传至水面控制台显示。
此外,中科院沈阳自动化所研制的6000m级AUV“潜龙二号”是在“潜龙一号”的基础上针对金属硫化物矿产的需求研制,在避碰能力、机动性、三维地形地貌快速成图等方面均有很大的提高。
图1.3 潜龙二号
1.2.2远程监控系统国内外研究现状
大尺度高航速水下自航模的水面监控系统属于远程监控系统的一种。此种系统无需操作人员到达设备现场就可以了解当前设备的工作情况,进而打破了空间上的限制,实现集中监控,最终实现各种资源的有效整合和分配。随着各种监视设备性能的不断提高,以及国家通信体系建设的不断完善,以太网通信技术彻底改变了传统监控系统的通信方式。
由于现在的被监控设备分散的越来越分散,要对当前设备的信息有一个总体的把握,并实现对分散在各地的设备进行实时监控。国内外学者在监控技术上应用了不同方法主要有以下几种:
- 工业有线现场总线:这种方法结合了控制技术、计算机网络技术以及仪表技术。把能够实现数据通信功能的设备作为控制网络上的节点,使用总线作为每一个节点相互通信的媒介。进而改变传统的封闭集中的控制系统的结构,使控制系统向网络化和智能化方向迈进。
- 工业无线通信:在环境恶劣并且不具备铺设线缆的条件下,可以利用无线网技术来组建工业局域网以实现每个网络节点之间的信息交流。相比于有线通讯,无线通讯具有成本低和结构简单的天生优势,但是同时存在损耗严重、通信距离受限、实时性以及可靠性较低的巨大缺点。
- 远程以太网通信:计算机技术和嵌入式技术的发展速度在当代迅速增加,使得现场的传感器和设备带有以太网接口,并与Internet无缝衔接。实现企业管理层直接监控现场设备层,极大的促进监控系统的信息整合。
现今越来越多的具有多种功能智能设备出现在各个领域。远程监控的相关技术是智能设备完成其功能的基础。其中迅速传输数据、与设备无缝连接、实时处理分析数据等功能能够有效地帮助管理者进行生产决策。随着科学研究的不断进行,远程监控系统的功能和实现方法将更进一步。
现在,已经有许多学校和科研院所在远程监控领域取得了显著的研究成果。例如哈尔滨工程大学设计的水下机器人监控系统,该系统运行在一台Windows系统的电脑上,能够显示机器人的运动姿态、当前深度、声呐图像、定位轨迹和摄像头反馈的图像信息,并且能够对水下机器人的运动方向以及姿态进行操控。
河北工业大学基于LabVIEW开发了一套核电站水下爬行机器人监控系统,该系统能实时显示摄像头传来的图片信息和机械臂的工作状态,并对机器人的运动速度、运动方向进行设置。
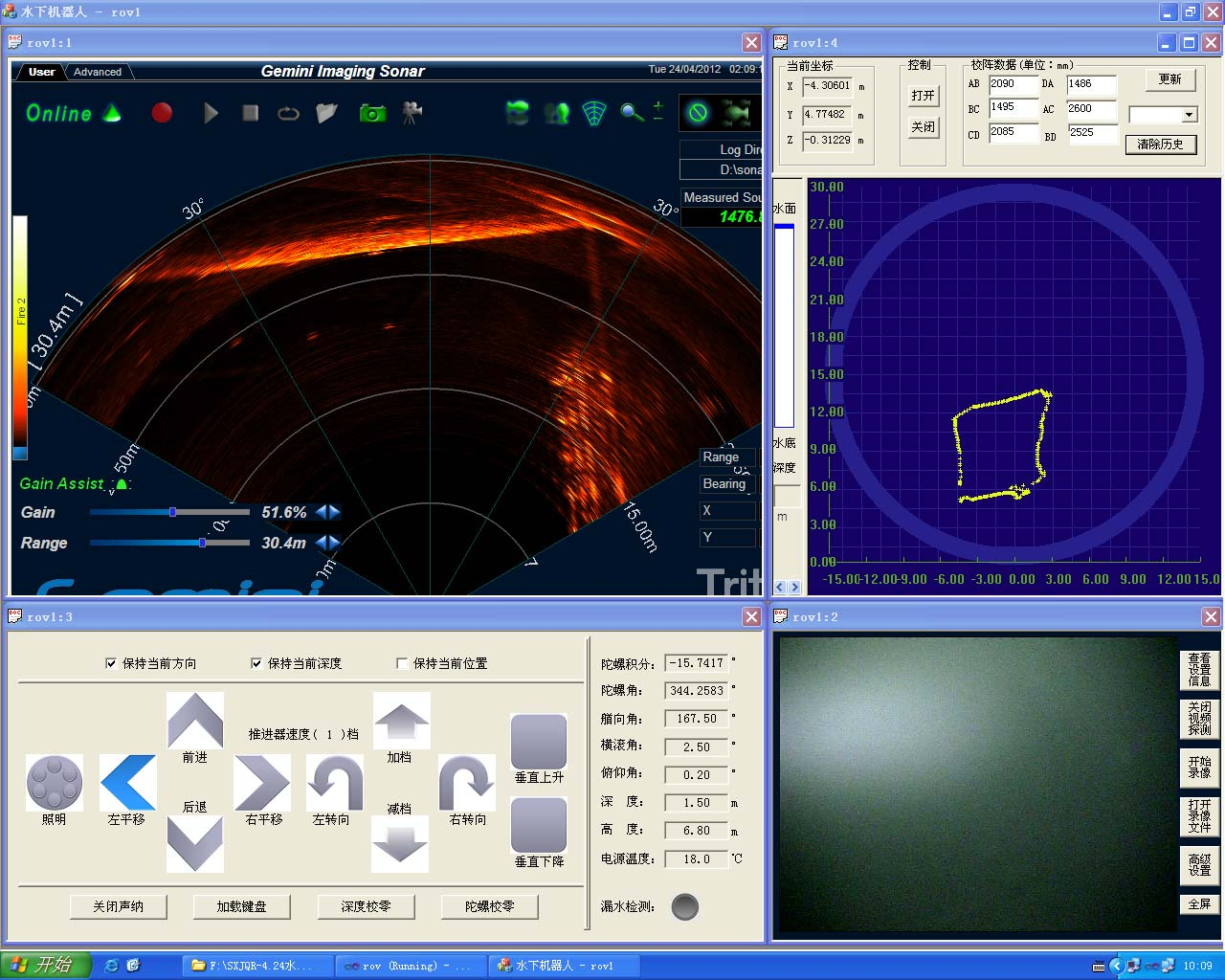
图1.4 哈尔滨工程大学研制的水下机器人监控系统
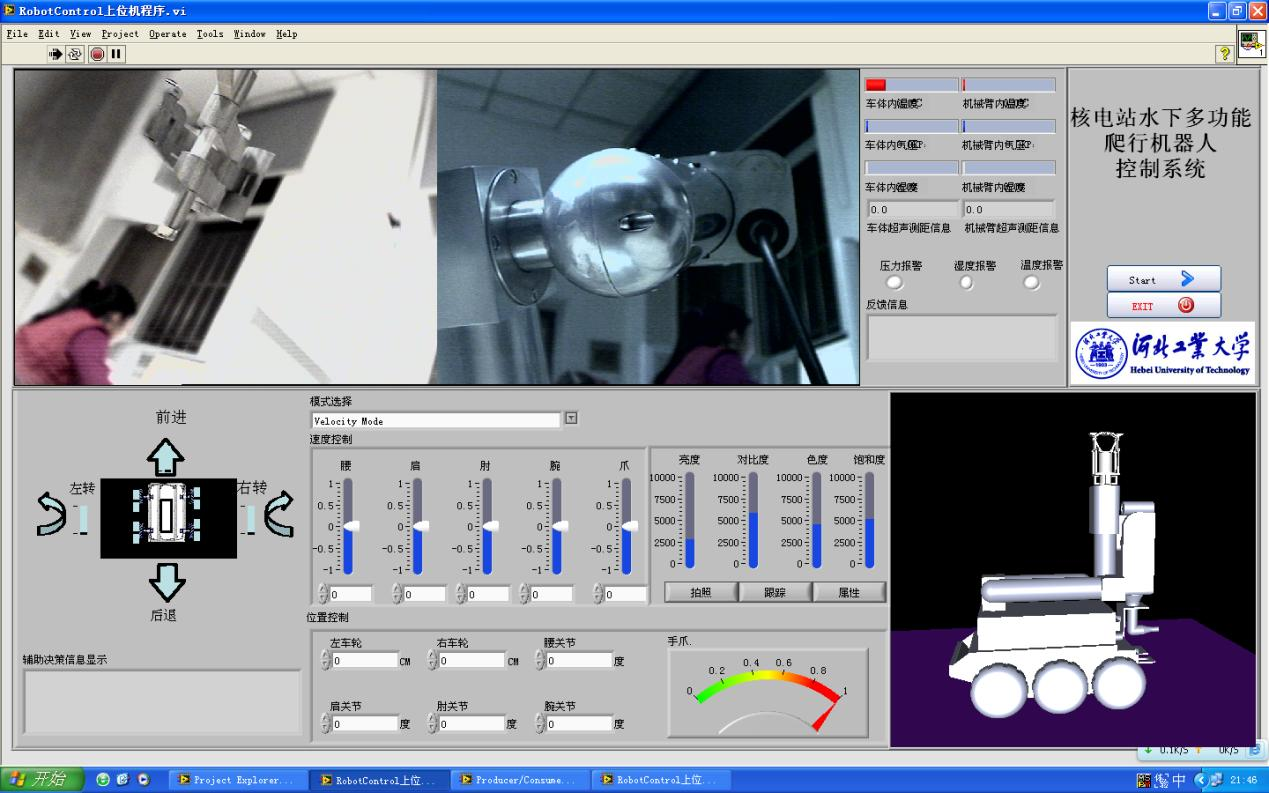
图1.5 河北工业大学研制的爬行机器人控制系统
1.3本文主要研究内容和结构安排
本文从潜艇专项航行试验的自航模实际需求出发,设计一套水面控制系统,实现操作人员在水面对自航模进行远程遥控、预置航行任务、监视航行器各设备的工作状态以及显示航行器的航行数据。
作为自航模控制系统的关键部分,水面控制系统在自航模的设计中的工占有极其重要的地位。本文的主要研究内容和结构安排如下:
第一章首先说明了课题研究背景和意义,并从水下自主航行器和远程监控系统的两个方面的国内外的研究现状及进展出发,最后介绍了本文的内容和安排。
第二章详细的分析了自航模系统的要求,并仔细介绍了自航模控制系统的结构及其组成。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: