面向海水养殖区监测的无人航行器结构设计毕业论文
2020-02-19 20:28:17
摘 要
随着海洋与内陆水域渔业资源的枯竭,水产捕捞量逐年下降,发展水产养殖成为必然趋势。然而目前的水产养殖发展与环境的矛盾不断加剧,水域环境恶化已成为水产养殖业健康持续发展的障碍之一,而有效的水质监测能避免矛盾的加剧,因此对养殖区域的水质监测十分必要。现有的监测手段主要有人工采样、实验室检查以及水质监测系统实时监测两种。人工采样、实验室检查结果较为精确但效率低下;水质监测系统不能全覆盖目标水域和域外预警同时精确度较低,两种方式都不能完全适应养殖区这一特殊水域对于水质监测所需同时具备时效与精确度的需求。
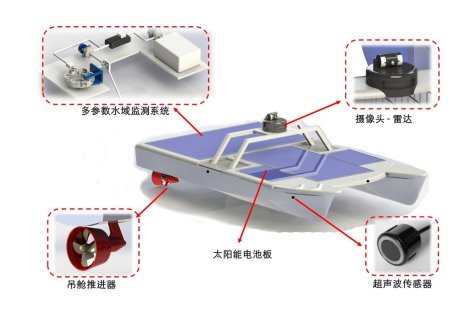
为了解决上述问题,本文设计了一种针对海水养殖区的的水质监测无人航行器,包括航行器结构设计、动力系统匹配和功能区选型。本文设计的无人航行器上安装有监测水质的传感器以及采集装置,既可对水域进行实时监测,又可把水样带回实验室进行实验分析。实现了对目标水域的全水域实时监测,提高了监测的效率,降低成本。
关键词:无人航行器; 海水养殖区; 实时监测; 取样
Abstract
With the depletion of Marine and inland fishery resources, the catch amount of aquatic products decreases year by year, and the development of aquaculture has become one of the important ways to solve the shortage of animal protein. However, the contradiction between the development of aquaculture and the environment continues to intensify, and the deterioration of water environment has become one of the obstacles to the healthy and sustainable development of aquaculture industry. Effective water quality monitoring can avoid the aggravation of the contradiction, so it is very necessary to monitor the water quality of aquaculture areas. The existing monitoring means mainly include manual sampling, laboratory inspection and real-time monitoring of water quality monitoring system. The results of manual sampling and laboratory inspection are accurate but inefficient; The water quality monitoring system cannot fully cover the target waters and the warning from outside the region at the same time has low accuracy. Neither of the two methods can fully adapt to the requirements of timeliness and accuracy for the water quality monitoring in the special waters of the breeding area.
In order to solve the above problems, this paper designs an unmanned vehicle for water quality monitoring in mariculture areas, including the structure design of the vehicle, power system matching and functional area selection. The unmanned vehicle designed in this paper is equipped with sensors and collection devices to monitor water quality, which can not only conduct real-time monitoring of water areas, but also bring water samples back to the laboratory for experimental analysis. It realizes the real-time monitoring of the whole water area of the target water area, improves the monitoring efficiency and reduces the cost.
Key words:Unmanned vehicle; Mariculture zone; Real-time monitoring; sampling
目录
第1章 绪论 1
1.1研究背景及意义 1
1.2国内外研究现状 1
1.2.1水域污染的研究现状 1
1.2.2水环境监测的研究现状 2
1.3研究内容 3
第2章 一般无人航行器结构设计 5
2.1一般航行器的分类 5
2.2一般航行器的结构组成 8
2.2.1载体结构 8
2.2.2能源以及通电系统 8
2.2.3推进和操作系统 9
2.2.4导航和控制系统 9
2.2.5通信系统 9
2.2.6作业载荷 9
2.3一般航行器的设计流程 10
2.3本章小结 10
第3章 无人航行器的整体设计 11
3.1海水养殖区对航行器的功能需求分析 11
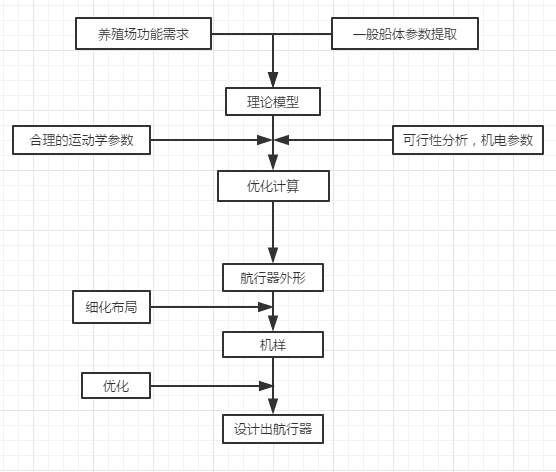
3.2无人航行器的设计步骤 11
3.3无人航行器的总体结构 12
3.3.1主尺度的选择 13
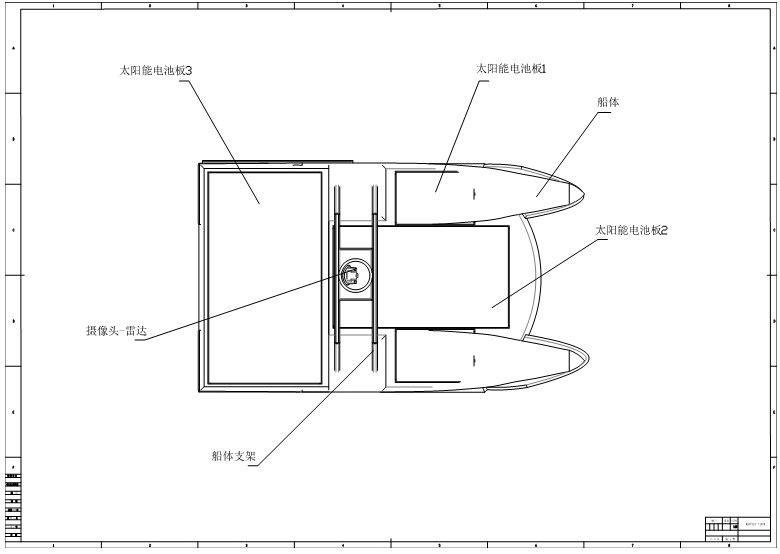
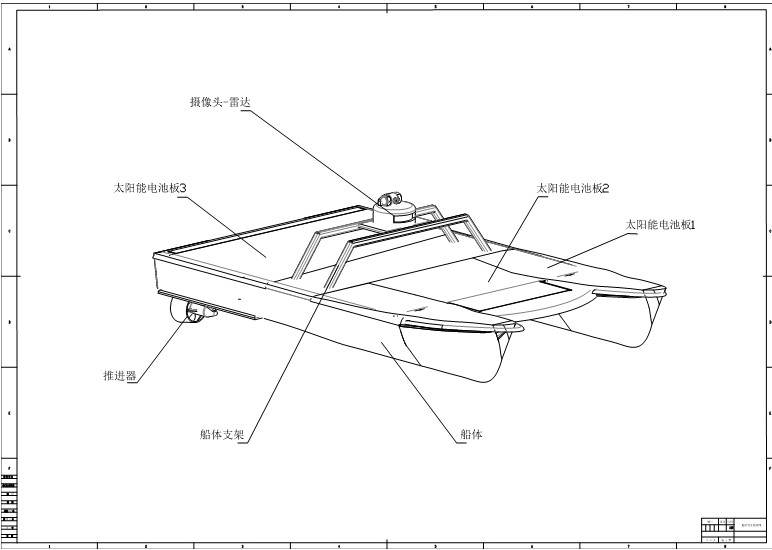
3.3.2航行器总布置设计 14
3.4本章小结 16
第4章 航行器子系统设计 17
4.1动力系统设计 17
4.1.1电机选择 17
4.1.2光伏发电系统 17
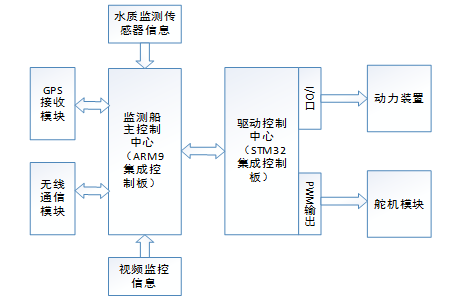
4.2 监测船控制系统与控制终端设计 18
4.2.1智能监测船系统 18
4.2.2智能终端系统 20
4.2.3控制辅助系统 20
4.3水域监测系统整体设计 21
4.4本章小结 24
第5章 无人航行器的的运动特性验证 25
5.1航行器的运动特性分析 25
5.2航行器的运动仿真分析 27
5.3本章小结 28
第6章 总结与展望 29
6.1总结 29
6.2展望 29
致谢 30
参考文献 31
第1章绪论
1.1研究背景及意义
近年来,我国近岸海水养殖业发展迅猛,其水产品产量已占我国总量的16%以上。为国民经济的发展和丰富人民菜篮子做出了重要贡献。随着航运的不断发展以及人们生活水平的不断提高,随之带来的水污染问题严重影响着海水养殖业的发展。由此,海水污染监测已经成为需要考虑的重要问题。海洋面积辽阔,储水量很巨大,因而长期以来是地球上最稳定的生态系统。由陆地流入海洋的各种物质被海洋接纳,而海洋本身却没有发生显著的变化。然而近几十年,随着世界工业的发展,海洋的污染也日趋加重,使局部海域环境发生了很大改变,并有继续扩展的趋势。根据污染物的性质和毒性,以及对海洋环境造成的危害方式,主要污染物有以下几类。石油及其产品:包括原油和从原油中分馏出来的溶剂油、汽油、煤油、柴油、润滑油、石蜡、沥青等等,以及经过裂化、催化而成的各种产品。每年排入海洋的石油污染物约1千万吨,主要是由工业生产,包括海上油井管道泄漏、油轮事故、船舶排污等造成的,特别是一些突发性的事故,一次泄漏的石油量可达10万吨以上,这种情况的出现,大片海水被油膜覆盖,将促使海洋生物大量死亡,严重影响海产品的价值,以及其他海上活动。
海水的质量,严重影响着海生物的繁殖和生活,严重影响着海水养殖业的发展,水产品及安全问题与水质状况密切相关,因而要对水质进行周期性定时监测,掌握水质现状及其变化趋势。海洋污染监测方法可分为常规监测和遥感遥测。常规监测是指现场人工采样、观测、室内化学分析测试及某些相关项目的现场自动探测。遥感遥测则指利用遥感技术监测石油、温排水和放射性物质的污染。常规监测耗费大量人力物力,还有可能会造成二次污染,而使用遥感遥测,可以快速准确的了解海面水质情况,并且在经济消耗方面,也相对比较小,也不会对水质造成污染。而本设计搭建了自主航行无人航行器,结合GPS,超声波和图像算法等做到水域内自主巡航和避障,根据监测工作的需求,搭载多种水质监测传感器,能将一定的水体样本带回实验室分析。本设计无人航行器能够到达水体大部分区域,可对水体进行连续性检测。
1.2国内外研究现状
1.2.1水域污染的研究现状
造成海水污染的物质有很多,其中包括重金属污染、化学物质污染、有机物污染重、放射性物质污染和热污染等[1]。
金属和酸碱:包括汞、铜、锌、钴、镐、铬等重金属,砷、硫、磷等非金属及各种酸和碱。由人类活动而进入海洋的汞,每年可达万吨,已大大超过全世界每年生产约9千吨汞的记录,这是因为煤、石油等在燃烧过程中,会使其中含有的微量汞释放出来,逸散到大气中,最终归入海洋,估计全球在这方面污染海洋的汞每年约4千吨。镉的年产量约1.5万吨,据调查镉对海洋的污染量远大于汞。随着工农业的发展通过各种途径进入海洋的某些重金属和非金属,以及酸碱等的量,呈增长趋势,加速了对海洋的污染。
农药:包括有农业上大量使用含有汞、铜以及有机氯等成分的除草剂、灭虫剂,以及工业上应用的多氯酸苯等。这一类农药具有很强的毒性,进入海洋经海洋生物体的富集作用,通过食物链进入人体,产生的危害性就更大,每年因此中毒的人数多达10万人以上,人类所患的一些新型的癌症与此也有密切关系。
有机物质和营养盐类:这类物质比较繁杂,包括工业排出的纤维素、糖醛、油脂;生活污水的粪便、洗涤剂和食物残渣,以及化肥的残液等。这些物质进入海洋,造成海水的富营养化,能促使某些生物急剧繁殖,大量消耗海水中的氧气,易形成赤潮,继而引起大批鱼虾贝类的死亡。
放射性核素:是由核武器试验、核工业和核动力设施释放出来的人工放射性物质,主要是锶-90、铯-137等半衰期为30年左右的同位素。据估计进入海洋中的放射性物质总量为2-6亿居里,这个量的绝对值是相当大的,由于海洋水体庞大,在海水中的分布极不均匀,在较强放射性水域中,海洋生物通过体表吸附或通过食物进入消化系统,并逐渐积累在器官中,通过食物链作用传递给人类。
固体废物:主要是工业和城市垃圾、船舶废弃物、工程渣土和疏浚物等。据估计,全世界每年产生各类固体废弃物约百亿吨,若1%进入海洋,其量也达亿吨。这些固体废弃物严重损害近岸海域的水生资源和破坏沿岸景观。
废热:工业排出的热废水造成海洋的热污染,在局部海域,如有比原正常水温高出4摄氏度以上的热废水常年流入时,,就会产生热污染,将破坏生态平衡和减少水中溶解氧。
上述各类污染物质大多是从陆上排入海洋,也有一部分是由海上直接进入或是通过大气输送到海洋。这些污染物质在各个水域分布是极不均匀的,因而造成的不良影响也不完全一样。
1.2.2水环境监测的研究现状
长期以来,人们并没有意识到海水质量的重要性,直到20世纪60,70年代,才开始对海水质量进行监测研究。但仅停留在单一目标有机污染物的监测,且均为实验室测量。自1962年以来、各海洋国家相继开展了海洋污染监测。目前,国际性的海洋污染监测计划主要有:"全球环境监测系统"的"海洋污染状况的监测"、"全球联合海洋台站网海洋污染(石油)监测试行计划"及"开阔大洋水域选定污染物本底水平监测计划"等。区域性海洋污染调查和监测活动较多,其中最活跃的区域是北大西洋、波罗的海、地中海、加勒比海及毗邻水域和西太平洋等。中国在1981年参加了"西太平洋贝类污染监测计划"。有些沿岸国家还建立了国家级海洋污染监测网络。中国于1978年 6月建立了"渤、黄海环境监测网";1984年5月,又建立了"全国海洋环境污染监测网",对沿岸海域实行全面的监测[2]。由于地理环境不同和污染物种类较多,故各海域的监测项目不尽相同。1975年6月开始执行的"全球联合海洋台站网海洋污染监测"的项目主要有:海洋温热结构、盐度、海流、风、波浪、降水、气温、pH、溶解氧、氨盐、亚硝酸盐、硝酸盐、硅酸盐、总有机碳、油类(可溶油、乳化油)、铅、汞、铜、锌、滴滴涕、多氯联苯和悬浮固体等。
2013年,国家海洋局办公室发布了《关于印发《2013年海洋环境监测工作任务》的通知》。建立了健全的质量管理制度和质量责任追究制度,完善了质量控制技术手段,切实保障监测数据信息质量。2014年6月,由国家海洋局生态环境保护司组织实施的西太平洋海洋环境监测预警体系建设2014年第一航次顺利返航。本航次除完成既定监测任务外,还首次在部分站位现场检出了日本福岛核事故特征核素——铯134。目前,全国已形成国家、省、市、县4级环境监测网络,共有专业、行业监测站4800多个,其中环保系统2200多个监测站,行业监测站2600多个。开展海洋环境监测的300多个,主要隶属于国家海洋局、海军、地方省市。
综上所述,随着海洋水质量监测技术的发展,人们对监测技术的要求也越来越高,在尽可能节省人力物力的同时,对海水质量长期,快速,准确的检测也是考虑的重要问题。所以无人检测航行器的研究是很有必要的,我国虽然技术相对落后,但随着各大先进技术发展,无人监测器的研发也十分迅猛,相信在不久的将来,我们的海水无人监测技术的发展与世界先进水平距离越来越小。
1.3研究内容
根据资料显示,国内外关于无人航行器的研究多集中在推进方面,虽然取得了很大的进展,但实际性能比如其机动性,航行速度,航行适应性方面相对较差,而航行器的机动性又和船体的结构有着很大的关系,一个合理的船体结构外形,可以很好的减少航行时的阻力,能够在各种环境下正常航行。与此同时,合理的船体结构能够搭载适宜的功能模块,从而实现功能需求。因此,要研发稳定实用的无人航行监测器,船体的结构非常关键。因此,本文重点完成以下内容:
- 了解并掌握航行器的一般设计和航行原理,建立航行器模型系。航行器要想快速,灵活,稳定的行驶,除了考虑动力推进方面以外,船体结构形状是其关键所在,在满足需求的基础上要尽可能考虑阻力对航行器的影响,以及在风浪情况下船体稳定性,优化其结构流线以达到减少动力系统负担的目的。
- 分析并确立航行器的功能需求、适用范围。本文设计的是针对海洋养殖区的水质量无人监测航行器,所以要分析确定海洋养殖区对航行器的功能需求,才能合理搭载监测仪器,合理安排船体空间。
- 针对养殖区的需求,适当选择监测仪器,完成航行器的功能模块设计,最后完成航行器的整体设计。
第2章一般无人航行器结构设计
2.1一般航行器的分类
一般船体根据不同的需求会有各种各样的结构方式。按其用途可以分为水下和水面航行器以及水陆两用的两栖类航行器。
(1)水下航行器是一种航行于水下的航行体,包括载人水下航行器和无人水下航行器,它能够完成水下勘探,侦测甚至是军事上的进攻防守等任务。在海洋开发日益重要的现在,水下航行器越来越得到各国的重视,无论是在民用还是军事上,都扮演者重要的角色。如图2.1鱼雷型航行器就是一种典型的水下航行器:

图2.1 鱼雷型航行器实物图
如图为一个鱼雷型航行器的实物图,这是一个类鱼雷型自主式航行器,由导管式推进器提供动力,十字型方向舵控制其姿态,航向,俯仰。流线型外形设计更利于水中航行,减小阻力,外形的设计都经过受力仿真,以保证达到最优外形。由于鱼雷型航行器在水下会受到各种力的作用,想要在水下空间完成任务,就必须能够完成:进退,摇艏,抬艏动作,十字形方向舵中,水平舵盘配合推进器可以完成上浮与下潜,竖立舵盘配合推进器可以完成转向,利用差动舵可以完成翻滚等动作及时调整姿态。
如图为美国Hydroid公司研发生产的REMUS系列水下机器人[3-4]中的REMUS-100水下机器人就是一个典型的鱼雷型航行器:

图2.2 REMUS-100水下机器人
REMUS-100的长度为1.6m,艇身的直径是19cm,质量是37公斤,设计潜深100m,其最大速度5节,其中装备有1千瓦时可充电锂电池,在3节的航速下可以连续工作10个小时。它搭载有侧扫声呐,DVL,LBL,压力传感器,温度传感器等,此外,还可以根据任务的要求选择包括GPS,声通讯设备,水下摄像机,声学图像系统,照明灯等多种设备。REMUS-100的设计主要用于水文调查,近海勘查,环境监测,科学采样等任务,事实证明,其优良的综合性能能够出色的完成其任务。在2003年REMUS-100参与了美军在伊拉克近海的海底排雷任务,通过搭载的设备发现了多个水雷,这就证明了该航行器的良好的出色的综合性能。这是目前应用最为成功的无人航行器之一。
哈尔滨工程大学是我国比较早开展水下航行器研发的单位之一,其中要发的小型水下机器人“微龙-I”的外形结构就是长方形的外壳,扁圆截面,如图:
图2.3 微龙-I水下机器人
该机器人总重量为76kg,总长95cm,长方体艇身,非耐压的外壳采用玻璃钢材质,而耐压舱由两个铝合金圆柱水密耐压壳组成。其能源舱内电池使用锂离子电池,执行系统由艉部左右两个主推进器,水平舵和垂直稳定翼等几部分组成,“微龙-I”配备有水下摄像头、探测声呐、超短基线、深度计等多种传感器[5]。
- 水面航行器顾名思义航行于水上,本文就是要设计一个水上航行器,它具有侦察,水质监测,水文测量,对近海地形地貌测绘,尾矿库监测,决堤巡防等功能,此外还能是娱乐工具,如图2.5是一种来自法国的水上飞行游乐产品:

图2.4 水上飞行器
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: