独立船舶轴带发电系统中无刷双馈电机的运行控制外文翻译资料
2022-07-20 20:34:06
英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
独立船舶轴带发电系统中无刷双馈电机的运行控制
摘要:本文介绍了一个基于无刷双馈电机(BDFM)的独立的船舶发电机系统。 在这个系统中,输出电压的幅值和在可变转子速度下BDFM的频率保持恒定并通过调节控制绕组(CW)激励来加载适当的BDFM电流。 提出了一个控制方案,并开发了控制系统的硬件设计。该轴带发电机系统在一个325TEU的集装箱上进行测试,测试结果表现出良好的动态性能和节能性能。
关键词:无刷双馈电机(BDFM); 船舶轴带发电机; 控制策略; 硬件设计; 动态表现;节能表现
- 绪论
近年来,为降低船舶能耗,船舶发电系统的燃油经济性能一直是航运公司关注的焦点。 表现有优良节能性能的船舶轴带发电系统正成为研究热点。一般来说,船舶的主机功率有10%〜15%冗余以确保海运安全。 船舶的主发动机用于驱动螺旋桨,船轴轴带发电系统可以利用主机的冗余动力通过将发电机连接到主发动机上来发电。因此,船轴轴带发电系统可以提高主机的效率并降低油耗。
目前主要有三种船轴轴带发电系统。 第一种如发电机[1],[2]那样,采用同步发电机和需要相同额定功率的电力电子转换器。 这意味着系统成本非常高。 第二种类型是基于双馈的感应电机(DFIM),而转换器只是向DFIM的转子提供转差功率[3],[4]。 在这个系统中转换器的额定功率会降低并且整个系统的费用大体上会降低。 但是,DFIM带有电刷和滑动
环,这导致了发电机维护成本的增加。 第三种是基于无刷双馈电机(BDFM),这是一种新型的电机,并显示出取代DFIM的潜力[5],[6]。 因为BDFM没有电刷或滑环,它的结构更简单并且比DFIG更可靠。
BDFM的定子包含两个独立的极对数不同的绕组(功率绕组,PW和控制绕组,CW),从而避免了两个绕组直接耦合。 并用一个特别设计的转子使两个定子绕组之间间接耦合。
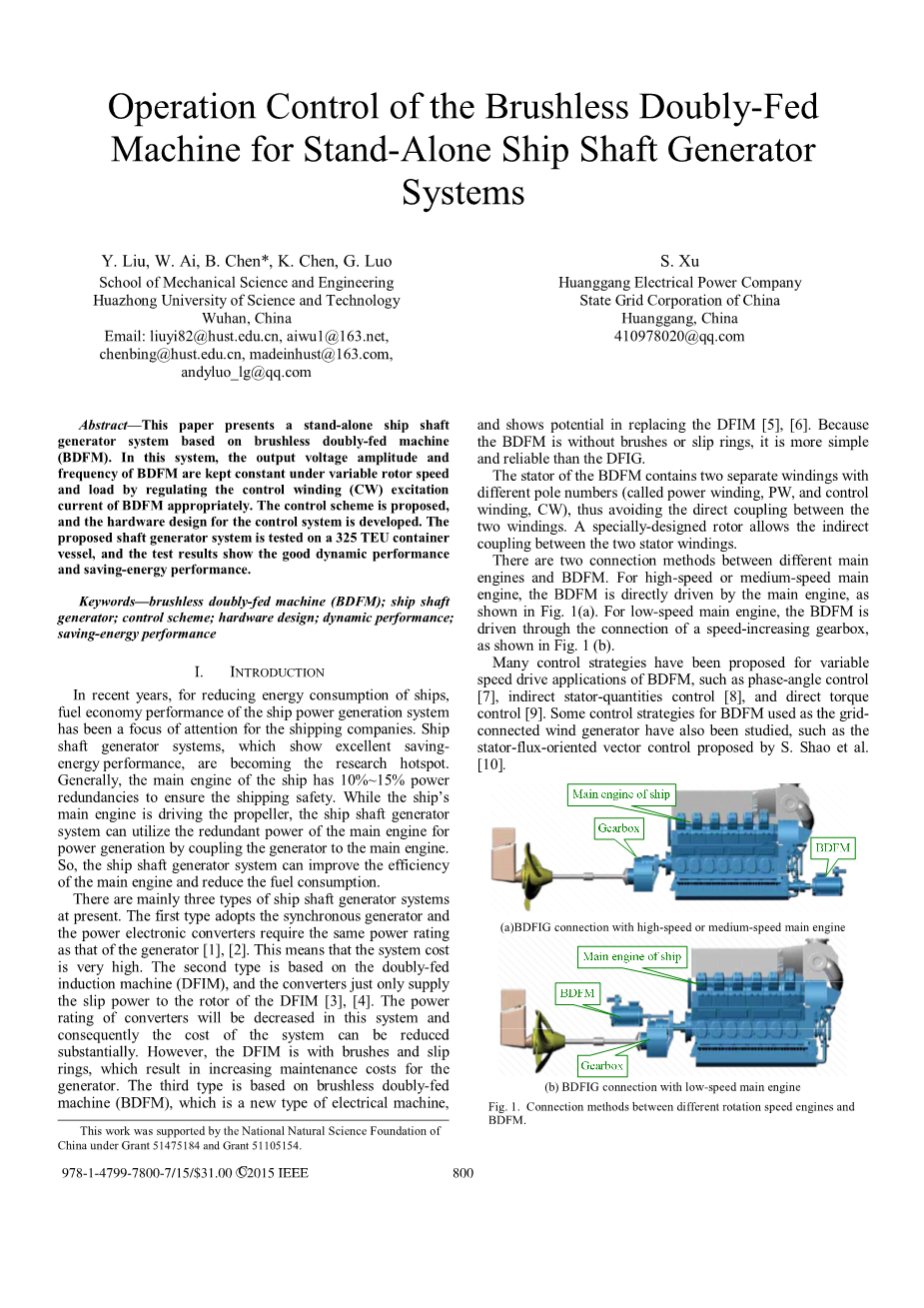
不同主机和BDFM之间有两种连接方式。对于高速或中速主机,BDFM由主发动机直接驱动,如图1(a)所示。 对于低速主机,BDFM是通过连接一个增速齿轮箱来驱动,如图1(b)所示。
许多控制策略用于变速BDFM的驱动应用,例如相角控制[7],间接定子量控制[8]和直接转矩控制[9]。 一些把BDFG用于风力并网发电的控制策略也被研究过,比如S.Shao等人提出的定子磁通定向矢量控制[10]。
一般而言,并网发电系统控制着这个发电机的有功和无功功率。 尽管如此,在独立的船舶轴带发电系统中,在速度或负载变化时发电机输出电压的幅值和频率应该保持稳定。 因此,基于BDFG的并网发电机的控制方案并不直接适用于独立的发电系统。
在这篇文章中,我们提出一种基于BDFM的独立船舶的轴带发电系统。 该系统在来自中国长江航运组325TEU集装箱船上进行测试。测试结果验证了该独立船舶轴带发电系统良好的动态性能和节能性能。
- BDFIG与高速或中速主机的连接
(b)与低速主机的BDFIG连接
图1.不同转速发动机和发动机之间的连接方法
二.BDFM的基本操作原理
BDFM可以在几种模式下运行,包括同步模式,级联模式和感应模式[5]。同步模式也称为双馈模式是最佳的,在此模式下转子速度可以表示如下:
其中p是极点对,是角频率。下标1,2和r分别表示PW,CW和转子。当为零,转子以所谓的自然旋转同步速度旋转。转子的速度超过被称为超同步转速,低于被称为亚同步转速。当转子转速变化时,为保持恒定,应随转子速度的变化而变化,的表达式可以从(1)推导出:
如果忽略定子和转子的铜损,PW和CW有效功率和在如下关系式中[5]:
当BDFM用于独立发电系统时,PW总是输出功率。但是,在亚同步操作中,CW将从PW吸收功率,因为从(2)开始是阴性的,这意味着根据(3)在PW和CW中功率流的方向是相反的。同样,在超同步操作中,CW将向负载输出功率。
三.控制方案设计
- 控制绕组的电流矢量控制
具有绕线转子的BDFM的动态矢量模型表示为[6],[10]:
其中u,i和psi;分别为电压,电流和通量;R和L分别是电阻和自感;下标1,2和r分别表示PW,CW和转子,和是定子绕组和转子之间的耦合电感;是dq参考范围中的一个角速度。
提出的CW电流矢量控制器是基于CW当前的矢量方向,也就是说在(4),(6)和(8)中应和设为相同值。表达式可以从(2)推导得出。如果(8)和(9)被分为dq分量且转子电压为,那么
其中s是微分算子d / dt。然后把(12)和(13)代入(10)和(11),那么
- 中的第一项可以写成:
这一项的零点和极点非常接近,因此可以相互抵消,那么(14)中的第一项可以简化为(14)中的第二项在分母中的占有很小的比例可以忽略不计,然后(14)中的第二项可以简化为:
- 可以简化为:
同样,(15)可以简化为:
考虑到,如果(6)和(7)被分解为dq分量,那么
把(16)和(17)代入到(18)—(21),那么
其中
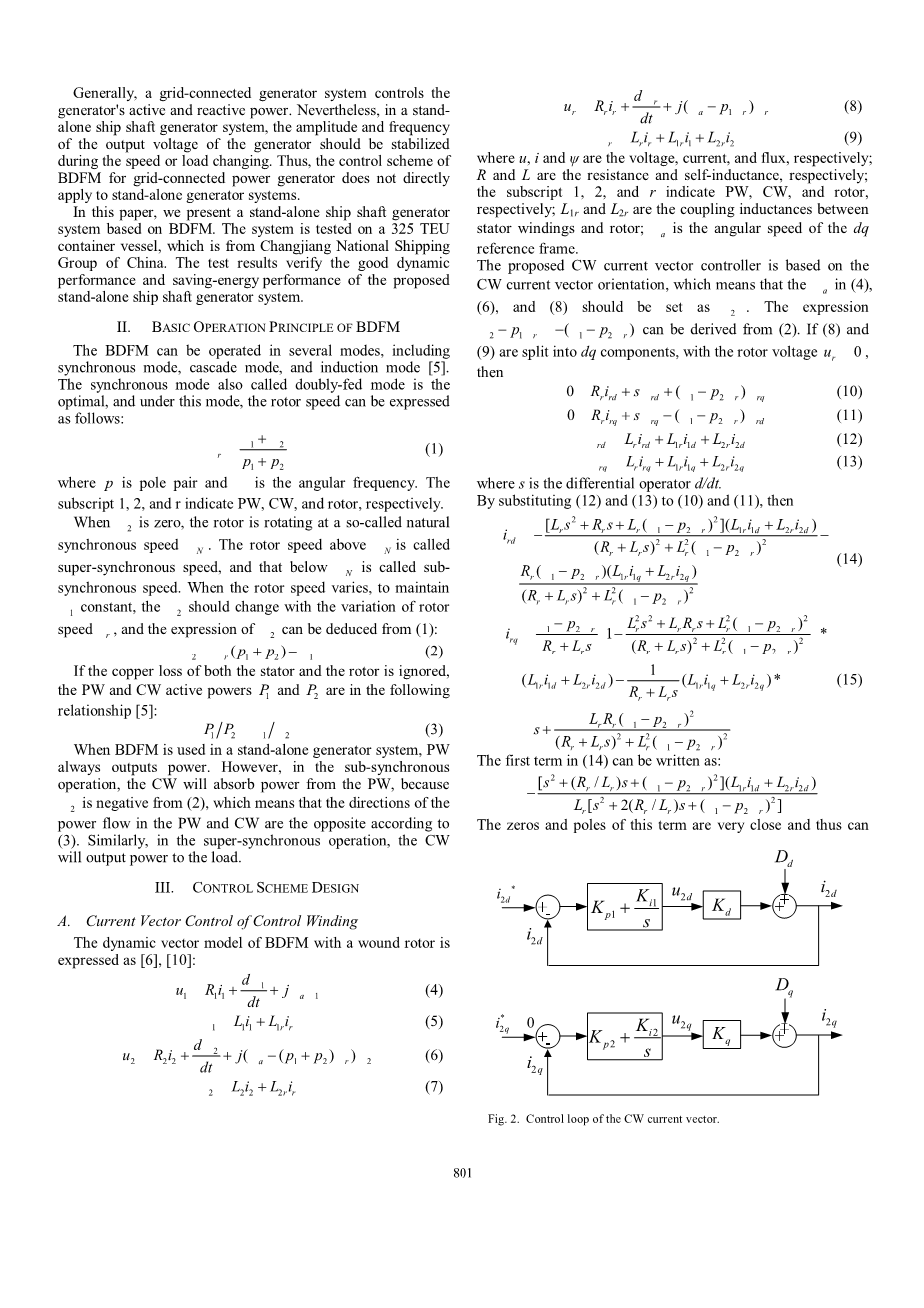
式中是CW的泄漏常数。代表之间的直接关系;表示PW和CW之间的交叉耦合,可以看作是低频干扰随转子的角速度变化。 图2显示了CW电流矢量的控制回路。
图2.CW电流矢量的控制回路。
B. 全面控制策略
总体控制方案如图3所示,主要是PW电压幅值控制,CW电流矢量控制,CW电流参考频率计算,和实际的PW电压幅值计算。
在PW电压幅值控制中,采用积分(PI)调节器来调节CW电流振幅以在可变转子速度和负载下保持PW电压幅度不变。 PW中的限制器模块通过电压幅值控制确保CW电流量不会超过额定值。在CW电流矢量控制中,CW的电流q分量的参考值被设置为零。这意味着CW电流d分量的参考值等于CW电
幅值参考值。CW电流矢量角度通过对CW电流的参考值的积分来获得角频率,这是由CW电流频率计算的参考值获得的。最后,CW电流矢量控制器可以产生与CW中的频率和幅值相应的励磁电流。实际的PW电压通过从三相坐标向两相静坐标的转换获得振幅。关于PW电压幅值U1的波纹被低通滤波器消除。
图三.整体控制方案的框图。
四.基于独立船舶轴带发电系统的BDFM硬件设计
A.BDFM设计
具有绕线转子的60kw BDFM是专门设计用于独立船舶轴轴带发电系统的。转子绕组(RW)的设计利用了齿谐波的原理和正弦绕组[11]。 RW由双层不等匝线圈组成,在三相磁力空间矢量集中对称绕组中主要包含两个具有不同极对的正弦磁场的基波。与具有相同尺寸的嵌套环笼式转子相比,转子谐波和参考转子泄漏电抗降低显著。 此外,该BDFM针对速度进行了范围为375〜700 r / min的优化,325 TEU集装箱船的主发动机与之速度范围匹配。BDFM中PW和CW的极对数量分别是4和2,在pw频率为50 Hz时其自然同步速度为500 r / min。BDFM的详细参数在表1中列出。
表I.60千瓦BDFM规格
B.控制电路设计
控制电路的结构如图4所示。船舶的主机直接驱动BDFM的转子。CW侧转换器(CSC)用可变励磁电流为CW供电。主动前端(AFE)来自德国ARADEX公司,其主要功能是(a)
将DC总线的电压稳定在设定点(b)在亚同步速度下吸收PW能量供给子CW(c)在超同步速度时将CW功率反馈给PW(d)保持统一AFE交流侧功率因数。八个薄膜电容器并联到直流母线上,每个电容器的电容量为4000uF,额定直流电压为800V。因为在独立BDFM系统启动之前直流总线电容不带电,CSC不能运行或提供CW励磁电流,因此应该有一个初始充电电路添加到系统中为直流母线电容器预充电,确保初始充电电路中的限流电阻在有充电电流不会太大。此外,一个DCCrowbar设备已安装到系统中以防止发生故障时产生过高的直流母线电压导致损坏电源设备或电容器。
图4.控制电路的框图
PW和DC总线的电压由通过LEM LV 100传感器测量;CW的电流通过LT 208-S7 / SP1来测量。转子的位置由解析度为1024周期/r的增量式编码器(P F公司的RHI90)来测量。 控制板是基于ARM(飞思卡尔MK60FN1M0VLQ12)和FPGA(AlteraCyclone IV)来设计的。 在控制板上,一个同步采样ADC芯片AD7606用于采样电压和电流信号。 控制板输出PWM信号给CSC用于调节CW电流的幅值和频率。AFE由控制板通过CAN总线通信来控制。触摸屏作为人机接口(HMI)用于输入命令和显示系统状态信息。
五.操作结果和分析
A.基于BDFM的实际独立船舶轴带发电系统
一个基于BDFM的实际独立船舶轴带发电系统已在一个来自中国长江航运集团的325 TEU集装箱船建成。该船舶的装载能力和正常电力负载分别是6200吨和30千瓦。主发动机的功率和速度范围分别是518千瓦,375〜700转/分。如图5所示,BDFM直接连接到主发动机的轴上。转换器的直流总线电压保持在800 V.BDFM的输出线电压参考值为400Veff / 50Hz。控制程序的循环周期为250us,所有参数通过使用齐格勒 - 尼科尔斯法进行调整,它不需要精确的有关BDFM模型的知识。
图5.集装箱船中基于BDFM的实际独立船舶轴带发电系统的照片
B.动态性能
所提出的发电系统的动态性能通过四个不同的实验来证明,其结果进行如图6〜图9所示。
在图6中,负载从60kw(满载)阶跃变化到0时,发电机转速为600 r / min。当负载突然下降时,CW电流幅值在一个周期内从79.2迅速下降到28.3 A。一个输出电压的幅值瞬时增加的峰值不超过额定电压的6.8%是可以被船舶轴带发电系统接受的。
图7显示了在发电机的转子速度为400转/分时,负载从0变化到42千瓦阶跃变化的动态性能。当突然加载时,输出电压下降到额定值的90%左右,CW电流幅值在300毫秒内从28.2增加到115 A。300 ms后,输出电压的幅值恢复。
图8和图9显示了转子变速时的动态性能。在两个实验中,发电机与42千瓦的负载连接。在转子转速变化过程中,输出电压的幅值和频率几乎不变。分析表明输出电压幅值和频率的误差小于额定值的plusmn;1%。此外,从图8和图9可以看出,当转子速度通过自然同步速度时CW电流的相序会改变。
C.燃料消耗分析
在一周内,对基于BDFM的轴带电系统在不同的电气负载和转子速度下的平均油耗进行测量。此外,在325 TEU集装箱船上有一个额定功率为75千瓦的柴油发电机组。如图10所示,为了分析轴带发电系统的经济性能,我们比较它和柴油发电机燃油消耗量相。比较结果表明轴带发电系统可显著降低油耗。而且,转子转速越高,节能效果越好,轴带发电系统具有更好的节能性能。
图6.负载从60千瓦变为0阶跃变化时的动态性能(转子速度保持恒定在600 r / min)。
图7.从0到42千瓦的负载阶跃变化的动态性能(转子速度保持恒定在400 r / min)。
图8.转子速度从超同步到亚同步变化时的动态特性(负载保持恒定在42千瓦)。
图9.转子速度从亚同步到超同步变化时动态特性(负载保持恒定在42千瓦)。
图10.柴油发电机和轴带发电机的燃油消耗量
六.结论
在这篇文章中介绍了基于BDFM的独立船舶轴带电系统及其控制方案。这个独立发电系统的控制目标是:当发电机的转子转速和负载发生变化时,输出电压的幅值和频率保持不变。该发电系统已经在325 TEU集装箱船上进行了测试,试验结果表现出了良好的动态性能和节能性能。由于轴带发电系统的独立运行使船内柴油发电机的运行时间减少。因此,可以显著降低船舶电站的维护成本。目前的研究表明BDFM船舶轴带发电系统显示出巨
全文共7633字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[8781],资料为PDF文档或Word文档,PDF文档可免费转换为Word



