用于旋转机械的模态结构不平衡故障检测外文翻译资料
2022-10-16 16:01:05

英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
用于旋转机械的模态结构不平衡故障检测
史密斯 布莱顿
摘要:本文提出了一种基于静态模型和动态转子不平衡故障的子空间故障检测方法。此输出的方法是使用一个渐进的方法,为敏感的模态结构的小变化。该方法最初是用于固定结构的开发,但适用于在这里的恒定转速旋转机器。一个理想化的双模型的旋转机器也被提出并用于演示该子空间故障检测方法:基于灵活转子的动力学模拟,和一个基于刚体的实验室设备,以有限的仪器演示该方法在物理系统中的应用。
关键词:故障检测,振动,旋转,机器,子空间方法,仿真
- 总论
振动故障是工业旋转机械安全性和可靠性的主要问题。过多的振动可以表现为各种原因,包括不平衡,轴错位,翘曲,开裂,齿轮开裂和轴承故障。本文重点研究了大型锥板离心式分离器中出现的一种故障:由喷嘴堵塞引起的转子不平衡。锥形板分离器从一个连续流动的打火机液相,使用旋转的转子碗旋转产生的离心力,以消除悬浮固相。离心力将固体相推向碗的边缘,在碗的边缘,固体相通过喷嘴流入外部集合系统中。当这些喷嘴堵塞和固体材料建立在碗里,将会发生一个共同的问题。这导致快速发展的静态或动态转子不平衡的振动水平受到损坏。
本文重点研究了不平衡引起的侧转子振动故障。由转子不平衡产生的振动频率对应的轴的速度和它的谐波,往往是很难区分振动产生的不平衡故障和其他轴转速故障(轴倾斜和开裂)。本文研究的目的是唯一的不平衡故障,因为与他们最相关的是喷嘴堵塞不平衡的情况。
检测振动故障分为三类方法:时域滤波方法、频域滤波的方法,和基于模型的方法。过滤方法代表了一种探索的研究领域 (Ed-wards et al., 1998; Jayaswal et al., 2008)。然而,在最近几年中,在基于模型的方法有一个增加的兴趣。单纯的获得足够的系统模型的工业机器往往是具有挑战性的。模型可以从物理原理的推理确定,也可以通过数据驱动的系统辨识,或两者的组合(Shabana, 1996; Adams, 2001; Bathe, 2006)。
几乎所有的振动系统可以模拟其模态结构:固有频率,阻尼系数,和模式形状。在存在故障的情况下,大多数的固定结构有一个模态的结构,不随时间或输入函数的变化而变化。在一个旋转系统中,陀螺力引入的时间依赖于运动方程(Bucher和Ewins,2001)。如果测量是在一个惯性参照系,转子是各向同性的,微分方程的运动是依赖于时间,而不是在旋转速度。如果一个各向同性的旋转系统保持在一个恒定的运行速度,运动方程是线性时不变。因此,一个恒定的速度机器的振动特性,可以在许多方面类似于一个固定的结构。
子空间方法用来测量数据矩阵,以此来推断系统内部结构的空间几何运算和投影连续使用条件(Overschee和Moor,1996)。他们是特别有用的一个系统的模态结构估计,并可应用于随机输入输出系统(Basseville等人,2001)。子空间方法已成功地应用于一系列的结构和机械的故障检测应用(Basseville等人1993,2007;Wenger et al.,2009)。这是有用的故障检测,因为振动系统的模态结构有一个直接的功能,测量该系统的物理性质。如果系统的质量、阻尼或刚度发生变化,振动的固有频率、阻尼或振型也将随之改变。振动故障可以通过观察一个系统的模态结构的变化来确定(沃尔夫和理查德森,1989)。
子空间方法与可以适用于检测到的模态结构的变化时相比,没有故障模型。一种基于子空间方法的故障检测技术显示检测到的振动故障的随机系统,通过产生残留,对模态结构的微小变化非常敏感(Basseville等人,2000)。本文开发的固定结构,并已应用于实际工业盈利(梅维尔等人,1999)和航空结构(Basseville等人,2007)。
两种基于模型的故障检测领域的旋转机介绍。
模拟和物理模型的一个理想化的旋转机器。这些模型的设计,以允许控制转子的不平衡,模拟一个由于离心分离器的喷嘴堵塞故障而产生的影响。仿真结合刚体和有限元分析得到的柔性转子动力学(有限元)的物理装置,实现了模拟机可以以有限的仪器在实验室进行试验的环境。
一种基于振动的故障检测系统,提出了基于模态结构的微小变化检测方式。该系统适用于静态和动态转子不平衡故障检测。它是基于一个适用于基于子空间的局部方法开发的固定结构。
- 介绍了模拟和物理机器模型。第3节提供了一个简短的概述的子空间故障检测方法和模拟机的样本计算。第4节包含了从两个模型的不平衡故障的选择的实验结果。
- 旋转机模型
2.1模拟机概要
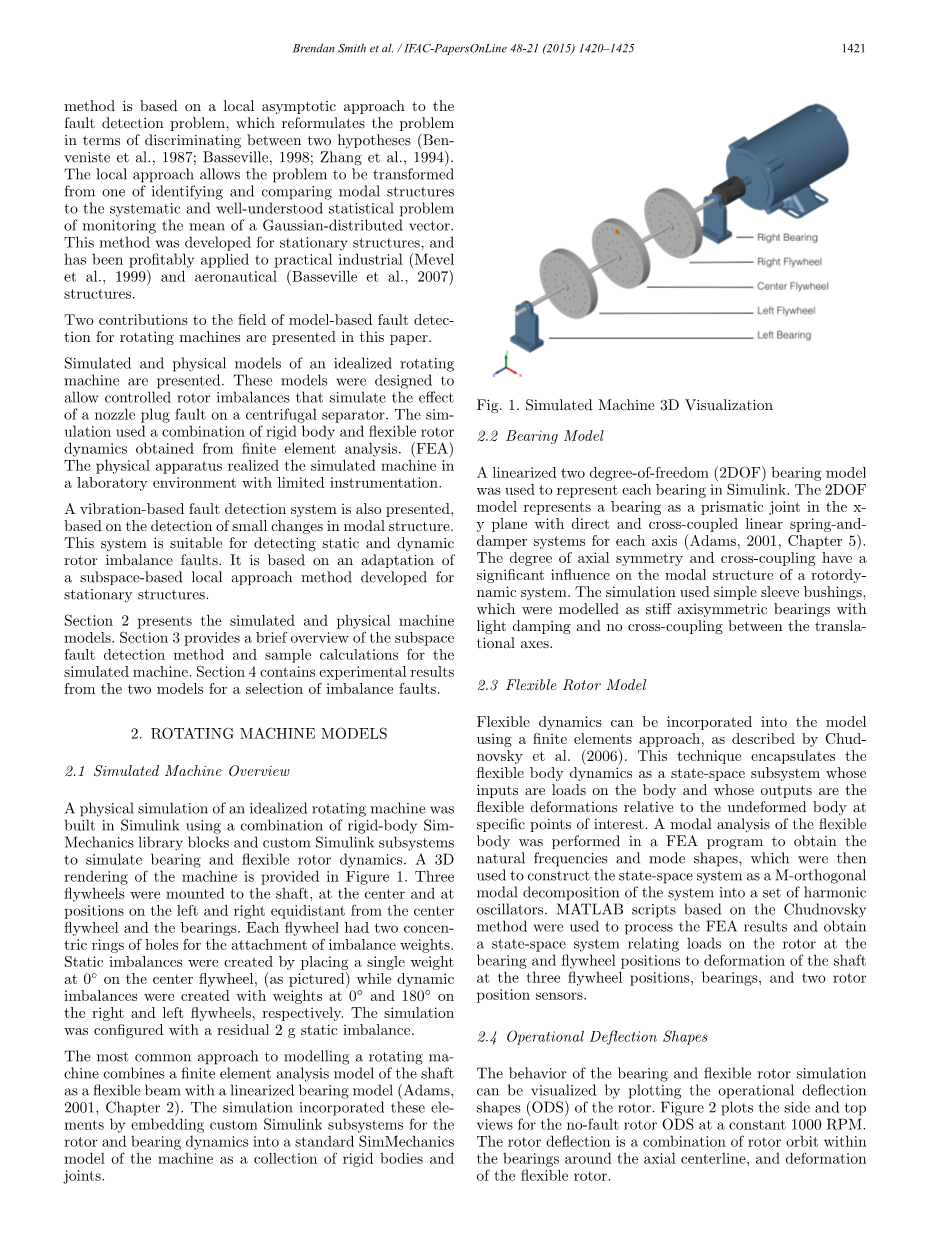
一个以理想的旋转机械物理模拟相结合的刚体模拟力学模块库和自定义仿真子系统来模拟轴承柔性转子动力学在Simulink中建立。图1中提供了一个三维渲染的机器。三飞轮安装在轴上,分别在中心和左右两侧等距离的中心飞轮和轴承的位置。每个飞轮有两密度不同的环孔的不平衡量的附件。静态失衡是通过将单个重量在0 飞轮在中心创建(如图),创建了动态不平衡重量在左侧和右侧的0 飞轮和180分别被模拟配置为一个残留的2克静态不平衡。
图1 模拟机三维可视图
模拟旋转机械结合轴的有限元分析模型和线性轴承模型的柔性梁是最常用的方法(亚当斯,2001,2章)。仿真将这些元素通过嵌入自定义仿真子系统的转子和轴承动力学为标准的机器SimMechanics模型作为一个刚体和关节的集合。2.2轴承模型
二自由度(线性自由度)轴承模型被用来在Simulink表示每个轴承。二自由度模型代表一个轴承与直接x-y平面移动关节和交叉耦合对每个轴的线性弹簧和阻尼器系统(亚当斯,2001,5章)。轴对称、交叉耦合程度对一个rotordy动力系统的模态结构有显著的影响。仿真中采用简单的衬套,被模拟为刚性轴轴承轻阻尼和平动轴之间无交叉耦合。
2.3柔性转子模型
通过CHUD novsky等人描述(2006),采用有限元方法,可以将灵活的动态纳入模型。该技术是将对机械的负荷和其输出的柔性变形相对变形体在最敏感的特定点作为柔性体动力学状态空间子系统的输入。在有限元程序中进行了模态分析,得到了固有频率和振动模型,然后利用该方法构建状态空间系统,将系统的正交模态分解成一组谐波振荡器。MATLAB脚本基于Chudnovsky法过程的有限元分析结果,得到状态空间系统的有关载荷对转子在轴承和飞轮位置的轴的变形在三飞轮位置,轴承,和两转子位置如何放置传感器。
2.4可操作的偏转模型
轴承和转子模拟的行为可以通过可视化操作绘制偏转形状(ODS)的转子。图2图的侧面、顶部为无故障转子ODS在恒定转速1000 rpm。偏转的转子是一个组合的转子绕轴中心线,和变形的柔性转子轴承的转子轨道。
图2 无故障模拟方法图
图3转子用于恒速运行在1000转6 g静态和动态不平衡。静态不平衡导致的峰值挠度大幅增加,而动态不平衡比峰值偏转的偏转形状有更明显的影响。
图3 模拟静态和动态不平衡方法图
2.5物理机概要
一种基于模拟机设计的实验装置已建成,如图4所示。直接采用安装在支架上的轴点之间的中心和外飞轮的电感邻近传感器测量侧转子振动。
图4 物理机
安装在物理机的每个飞轮具有相同的图案的孔的同心环,可以通过连接10克螺母和螺栓组件通过孔,在模拟机创建不平衡控制。
- subspace失衡故障检
本文实施的基于振动的故障检测算法来源于由Basseville等人描述的子空间方法(2000)。该方法使用了一种利用子空间方法无故障模态结构模型和输出数据的协方差矩阵来渐近的故障检测方案。
一个当地的算法产生的残留分布是高斯统计与对应的系统参数小故障变化不断的协方差。剩余的零平均分布在成立,和另一个非零的平均分布在成立:
在残余向量,是一个参数表示无故障系统模型,是平均剩余灵敏度矩阵,一个来自 的Jacobian矩阵,和是残差协方差矩阵。是未知的对应于特定残差的故障向量。
首先,二阶无故障模型被用来计算前提矩阵。从自然频率的特征值11.92赫兹和阻尼比0.05计算算一对离散时间,获得以下特征向量:
观察到相应的特征向量矩阵,系统输出的矩阵和特征向量矩阵产品,从模式的组合形状的转子测量点:
包含在和的无故障模态结构模型分为称为系统参数的一个列向量:
在VEC矢量叠加算子的输出一个列向量组成的堆放在列秩序。
方程(4)是一个完整的振动模型无故障系统动力学方程。下一步是
从模态得到一个扩展可观性矩阵模型。利用模态坐标系的可观性矩阵获得本征值和无故障系统模型的特征向量:
在是一个对角矩阵的特征值,和P是一个整数,至少是真正的系统为大。 一个更大的p值,将导致在一个较长的残余向量和更多的数值计算,将会产生更多的剩余。
一个为p=2系统顺序被使用。这就给了下面的可观测性矩阵:
子空间方法需要标准正交基向量集的方程(5)来扩展的观察能力矩阵的左核空间。这是输入封装无故障模型的残差生成算法的关键一步。这个被称为S矩阵,运用MATLAB内置空函数转置的可观测性矩阵,可以得到一个简单的方式:
通过计算输出变量和一块Hankel矩阵纳入剩余来测量输出数据:
在是测量输出数据的滞后时间j,T是与测量噪声统计相关,取为零,并且。如果系统是多输出,则每一个是矩阵。选择整数,以确保不受列宽度限制的秩。一个更大的值可能被使用,但它会增加的残余向量的长度和所需大量的数值计算来生成它。一个有价值的数值p= 3被选中。
下一步是 block-Hankel 矩阵的每1秒的窗口测量并输出数据。首先,计算每个所需的时间滞后值的从1到p q。Block-Hankel矩阵的协方差矩阵,从这些协方差矩阵组装。这个矩阵取决于施工中使用的特定样本数据,但说明block-Hankel矩阵组合为30个无故障的模拟窗口如下:
以下属性保存为S和,从无故障系统计算时计算:
残余向量的计算如下类似的配方:
在这里使用的数据样本的数目在在方程(10)中的计算关于实际系统状态的信息,这可能或可能不会出现故障,而S代表无故障系统模型。是一个列向量的长度,由给出。
此窗口的剩余向量计算使用S矩阵和。结果是一个复杂的24元残余向量值,其中每个元素都是高斯分布的随机变量:
可以证明,如果没有故障残余高斯零均值和非单位的方差,检验统计量可以得到分布有看k-1个自由度,如果K是长度的残差向量。是标量可以与一个阈值确定无过错的假设应该被拒绝比较。如果超过,故障判断时有发生。的具体值从表中选择个值索引所需的自由度和置信水平。二阶、双输出故障检测系统的剩余矢量具有23个自由度,使用95%的置信水平。这些选择表提供了一个门槛35.17 。归一化向量的范数平方的计算如下,给30秒的窗口的检验统计量。正如预期的那样,检验统计量是低于检测阈值。
4 实验结果
4.1模拟机
用x轴的转子位置信号计算1的窗户在左边和右边的传感器的位置,每个模拟残差向量。一个规范的检验统计量计算每个归一化矢量与阈值的,用五分钟模拟的无故障系统相比之前的任何故障进行模拟,想要得到得到无故障残差必须计算方差向量。图5中所提供的为无故障测试统计序列图。
图5.simulated机无故障测试统计序列
图6.simulated机静态不平衡2G测试统计序列
图7.模拟机的静态不平衡4G试验统计—抽动序列
图8.模拟机的动态不平衡2G测试统计序列
图9.模拟机的动态不平衡4G试验统计序列
图6和7显示了6克的测试统计序列和4克静态失衡。在30年代引进了故障仿真。故障发生后的检验统计量低于检测阈值为:2克不平衡,但略高于4克不平衡。图8和9显示测试统计序列为2克和4克动态失衡。2克不平衡检验统计量在很大程度上是低于检测阈值。4克不平衡产生测试的统计数据,以及高于阈值。
4.2物理机械故障检测
残余向量,计算1秒的窗口中的模拟结果与实际模拟结果相同。不像模拟这台机器不能介绍试运行过程中的故障。作为一个结果,在所有测试运行实验中,在哪里进行的故障,作为机器检验统计量的直接上升结果,将导致加快操作的速度。图10和11显示测试统计序列静态和动态不平衡创建的附加10克到内部连接环的权重。一旦机器达到运行速度,将在检测阈值的时候,检验一次统计量。
图10.物理机器内部静态不平衡测试统计序列
图11.物理机内动态不平衡测试统计序列
5 结论
本文主要介绍了该领域旋转机械故障检测的主要贡献:理想化旋转子空间故障的机器模型及其应用检测方法。这些简化和良好的理解系统,使得子空间故障检测被证明是一种有效的工具。
模型识别提出了最大的挑战,即实际应用。旋转机械的模态分析比固定的结构要复杂得多,尤其是原动机的特征子空间的故障检测。即使在理想化的机器的情况下,得到的模型没有亲密的知识机械设计,它也不是实用的。从而进一步走向用技术确定模态结构模型是必要的,使得子空间方法可以得到更广泛地应用。
参考文献
亚当斯,马丁(2001)。旋转机械振动故障分析。德克尔,纽约,纽约。
B
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[151166],资料为PDF文档或Word文档,PDF文档可免费转换为Word



