无人驾驶汽车障碍物检测系统设计与实现毕业论文
2020-04-13 11:07:33
摘 要
无人驾驶汽车目前已经成为全球非常热门的技术之一,其一般装配有多种传感器,根据传感器得到的信息进行自动行驶。无人驾驶汽车一般有几个部分组合而成,包括环境感知,定位导航,路线规划等部分,其中,环境感知是无人驾驶汽车行驶的基础,环境感知的主要任务是通过汽车上装配的多种传感器来检测车辆周边的静态及动态障碍物,从而为下一步的路径规划提供数据信息,而传感器是环境感知系统的重要组成部分,是实现障碍物检测的重要部件。本文提出了一种基于三维激光雷达的障碍物检测方法。本文以Velodyle16线三维激光雷达作为主要传感器,首先进行激光雷达的标定,将激光雷达坐标系下的原始点云转化为车辆坐标系下的点云数据。然后建立栅格地图,本文采用最大最小值高度图法建立栅格地图,即求取每个栅格内所有点的最大z坐标差值,当该差值大于设定的阈值时就认为该栅格为障碍物栅格,否则把其看做非障碍物栅格,从而得到障碍点筛选结果。然后以此筛选结果为基础,采用DBSCAN算法进行障碍物点的聚类,将属于同一个障碍物的点聚类到一起。最后采用最小凸包法与模糊线段法结合的方法来得到聚类后的障碍物的最小外接矩形,从而完成障碍物检测的目标。
关键词:无人驾驶汽车;激光雷达;障碍物检测
Abstract
Autonomous vehicles have become one of the most popular technologies in the world. They are generally equipped with a variety of sensors and automatically travel according to the information obtained by the sensors. Autonomous vehicles are generally composed of several parts, including environment perception, positioning navigation, route planning, etc. Among them, environmental perception is the basis for Autonomous vehicles, and the main task of environmental awareness is detecting static and dynamic obstacles around the vehicle through the assembly of sensors to provide data information for the next path planning. The sensor is an important part of the environment-aware system and is an important component for obstacle detection. This paper proposes an obstacle detection method based on 3D laser radar. This article takes a Velodyle 16-line 3D laser radar as the main sensor. Firstly, we should calibrate the laser radar and convert the original point cloud in the laser radar coordinate system into the vehicle coordinate system. Secondly,we can create a grid map, this article uses the maximum and minimum height map method to create a grid map.We can obtain the maximum z coordinate difference of all points in each grid. When the difference is greater than the set threshold ,the grid is considered to be an obstacle grid, otherwise it is regarded as a non-obstacle grid, so that the obstacle point screening results are obtained. Based on the screening results, clustering of obstacle points using the DBSCAN algorithm will be used. The points of an obstacle are clustered together, and then the method of combining the least convex hull method and the fuzzy line segment method is used to obtain the minimum circumscribed rectangle of the clustered obstacles, thereby completing the object of obstacle detection..
Key Words: driverless car; lidar; obstacle detection
目录
摘要 I
Abstract I
第1章 绪论 1
1.1 无人驾驶汽车概述 1
1.1.1 无人驾驶汽车的发展状况 1
1.1.2 无人驾驶汽车的主要内容 2
1.2 无人驾驶汽车障碍物检测的背景及意义 3
1.2.1 论文选题的目的和意义 3
1.2.2 国内外关于该论题的研究现状和发展趋势 3
1.2.3 三维激光雷达传感器介绍 4
1.3 本文研究内容 5
第2章 激光雷达数据采集与标定 6
2.1 三维激光雷达的安装 6
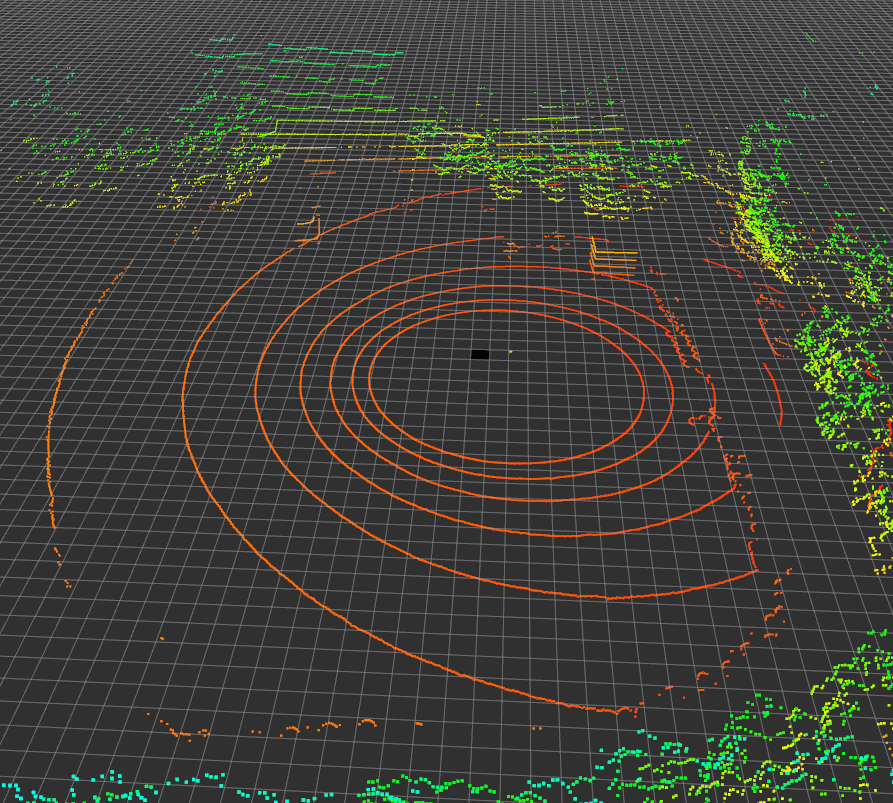
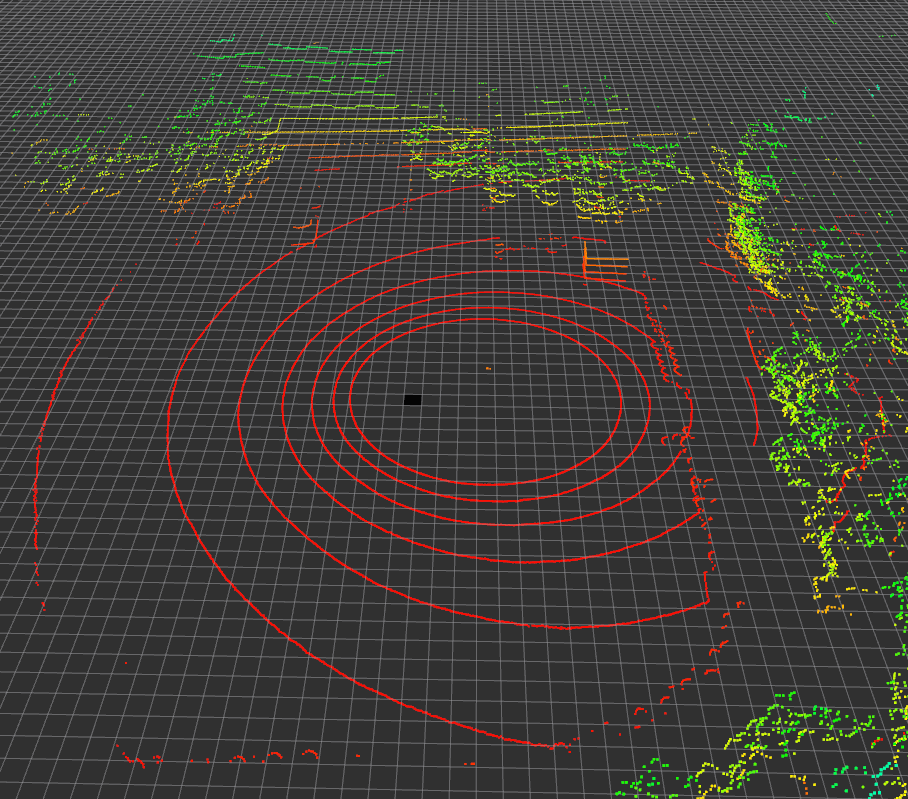
2.2 雷达数据采集 6
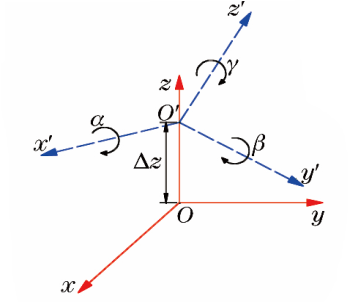
2.3 三维激光雷达标定 7
2.3.1 标定方法简述 7
2.3.2 标定结果分析 9
2.4 本章小结 9
第3章 基于栅格图的障碍点提取 11
3.1 点云数据预处理 11
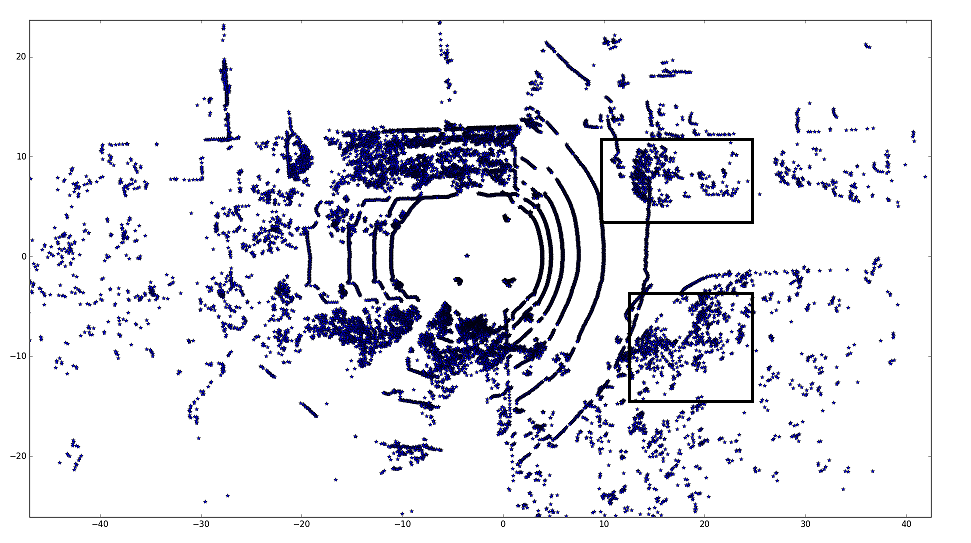
3.2 栅格图的构建 12
3.3障碍点提取 13
第4章 基于DBSCAN的障碍物检测 15
4.1 障碍物聚类 15
4.2 障碍物检测 16
4.3 矩形包罗结果分析 18
4.4本章小结 19
第5章 总结与展望 20
参考文献 21
致谢 23
第1章 绪论
1.1 无人驾驶汽车概述
1.1.1 无人驾驶汽车的发展状况
无人驾驶车辆是一种具有一定自主能力的智能车辆,其一般装配有多种传感器,根据传感器得到的信息进行自动行驶。传统车辆相比,无人驾驶汽车使用的设备更加多元,操作更加简单,使用更加方便,使其成为可以自主感受周围环境变化并做出适当的规划的特殊机械[1]。无人驾驶车已经集成了系统设计、机器视觉、AI、行为控制等多项技术,是智能控制技术、计算机科学等先进技术的产物。近年来,无人驾驶汽车的智能化水平取得了长足的进步,并在许多领域得到了广泛的应用。无人驾驶汽车的应用场景也日益复杂,从简单的已知环境到复杂而不断变化的未知环境(如陆地和海洋)。无人驾驶汽车为许多学科提供了理想的测试平台,如计算机技术,传感器技术,人工智能和控制科学,其应用范围也逐步从军用走向民用,正逐步改变着人们的出行方式[2]。
20世纪70年代以来,西方发达国家开始研究无人驾驶汽车,取得了一定的研究成果。国外军用无人机的发展主要有三个阶段: 在20世纪80年代之前,由于硬件技术,计算机图形处理和数据融合等关键技术的发展受到限制,地面无人驾驶汽车的开发仅限于远程控制。二十世纪八十年代以后,随着自动驾驶技术等相关技术的突破,自动驾驶汽车得到进一步发展,各种自动,半自动移动平台纷纷涌现;然而,由于定位和导航设施,障碍识别传感器以及计算和控制处理器等关键组件性能的限制,同期的自主车辆在一定程度上实现了自动行驶,但仍存在着行驶缓慢,环境感应能力差等问题。这些平台主要用于排雷、排爆、侦察等行动。二十世纪九十年代以后,由于计算机、AI、机器人等技术的突破,半自动无人驾驶汽车发展迅速。部分实用的无人驾驶汽车参与了实战,地面无人驾驶汽车的作战能力得到进一步的检验,各国看到了无人驾驶汽车的广阔前景,它极大地激发了各国开发无人驾驶汽车的热情,引发了研究的高潮[3]。
在2000年之前,CarnegieMellon University开发的无人驾驶汽车系列和意大利开发的一些无人驾驶汽车是最具代表性的。其中NavLab—11系统是NavLab系列最新的无人车系统。其车体为吉普车改装而成。车上使用的传感器包括差分GPS,陀螺仪和光电编码器,激光雷达,摄像机等。其中,差分GPS传感器采用Trimble Ag-GPS 114设备,使用了广域增强系统,可以达到亚米级的精度;陀螺仪和光电码盘使用的是Crossbow的VG400CA惯性姿态测量系统,该系统能在动态环境中实现全姿态测量;激光雷达采用SICK LMS 221-30206,其拥有50米的最大检测范围,分辨率能达到10毫米,有180°的最大水平扫描角度,角分辨率为0.5°;摄像机选用SONY EVI-330。NavLab-11汽车的最高车速能达到102km/h[4]。
1.1.2 无人驾驶汽车的主要内容
作为一个及其复杂的系统,无人驾驶汽车的内容主要包括如下几个方面: 1)体系结构。体系结构是一个系统的骨架,它从根本上定义了系统的基本框架和各个子单元的相互关系;对于无人驾驶汽车系统,该架构实际上就是主单元和各个子单元进行信息交换的方式。无人驾驶车辆架构决定了系统软件和硬件之间的组织原则和集成方法,良好的架构可以使系统模块更加协调,使系统的软件和硬件更加开放[5]。
2)环境感知。智能车辆的环境感知功能如同人类的视听功能,通过汽车上装配的传感器检测周边环境,获得相关障碍物信息,还要能准确迅速的处理信息中的相关数据。该系统可以为无人驾驶车辆提供关于车辆和周围障碍物的信息,包括车辆与周围障碍物之间的相对距离,相对速度和其他信息,为随后的控制决策步骤提供了信息基础。该系统是自动驾驶汽车实现自主避障,自我定位和路线规划等相关智能行为的基础。
3)定位导航。无人驾驶汽车通过定位和导航来获得自身位置,姿态等相关信息。定位导航系统是无人驾驶汽车安全行驶的基础。无人驾驶汽车的定位导航的实现相对于环境感知较为简单,一般可采用GPS卫星导航。组合导航系统通常集成两种或更多种不同类型的相关传感器信息以改善导航性能。
4)路线规划。路线规划是指基于某个环境模型的某些性能指标的无碰撞安全路线的规划,给出无人驾驶汽车的起点和终点。无人驾驶汽车的路径规划过程较为复杂,其需要根据环境感知得到的障碍物信息来选择合适的路径行驶,此外还需要考虑车辆的行驶速度以及周边车辆的相对速度,综合多种信息,最终选择一个安全的路径。
5)行驶控制。无人驾驶汽车在行驶过程中需要时刻进行控制,这样才能安全行驶。通过对汽车多方面的控制,垂直运动控制可以准确跟踪所需车速。在确保车辆操纵稳定性的前提下,横向运动控制可以实现无人驾驶汽车的路径跟踪[6]。
6)一体化设计。与传统的增加外部机构的方法相比,无人驾驶汽车的整体设计是未来无人驾驶汽车发展的重要指导。它综合考虑智能汽车的各种需求,以及车辆各部件之间的相互联系和影响,在制造的无人驾驶汽车上集成各个模块及其相关部件。它注重制造的完整性,以实现智能汽车的整体优化设计,从可靠性,布局, 对性能,结构,强度,控制,可维护性和生命周期进行全面分析和协调。
1.2 无人驾驶汽车障碍物检测的背景及意义
1.2.1 论文选题的目的和意义
由于各方面的原因,车祸导致的伤亡率一直居高不下,驾驶员的误操作是交通事故的最根本原因,人类感知能力和控制能力的局限性往往使驾驶员无法在意外情况下迅速作出合理的决定[7],而无人驾驶在这方面有着得天独厚的优势,其感知障碍物的性能出色,在发生危险时对车辆的控制也更加迅速。虽然无人驾驶汽车技术在过去几年取得了长足的进步,多家汽车厂商纷纷推出自家的无人驾驶汽车项目,但由于现实交通环境包含多种类型的交通参与者,无人驾驶汽车在使用时将不可避免地与其他参与者相互影响。在无人驾驶汽车研究过程中,安全是其最需要解决的问题,无人驾驶汽车在道路行驶过程会面临各种各样的问题,而想要安全行驶必须满足以下条件,首先需要检测出车辆周边的各种可能会影响到行驶的障碍物,无人车首先需要根据自己的位置识别出周边车辆,然后判断其是否会影响自身行驶,其中最重要的就是根据设计的障碍物检测算法检测出障碍物,这也是本文需要完成的内容。然后,必须要确定障碍物的运动状态,并根据其现在时刻的位置以及运动速度等估计其运动路径。最后,需要确定障碍物的种类,对静态障碍物和动态障碍物应采取不同的避障策略,如对静态障碍物应该采取保守的避障策略,而对动态障碍物可以采取略微灵活的避障策略。本文的目的就是选择合适的传感器进行障碍物的扫描,然后编写出一个相应的检测算法,对传感器扫描得到的数据进行处理,最终达到障碍物识别的目的,从而为无人驾驶汽车避障打下基础[8]。
1.2.2 国内外关于该论题的研究现状和发展趋势
障碍物的检测是智能汽车在实际交通状况下行驶的重要条件。由于计算机技术的迅速发展,研究者已经提出了很多优秀的障碍物检测方法。这些方法一般具有识别速度快,错误检测率低等优点,其中较为出色的是基于相机的障碍物检测方法,但是由于摄像机的光强要求较高,强光或弱光会导致障碍物检测方法失败。另外,该方法不能提供准确的障碍物位置信息,这将导致运动状态计算结果的误差较大。研究人员使用了立体相机和红外相机。 但其分辨率较低。毫米波雷达对非静态物体的纵向运动非常敏感,但由于毫米波雷达的特殊结构,它对动态目标的横向运动不敏感。其视觉感知范围狭窄不能满足智能车辆障碍物检测和跟踪的需要; 激光雷达是一种理想的环境感知型传感器,因为它可以准确地获取障碍物的位置信息,并几乎不受光线条件的影响。由于上述原因,用于检测和追踪无人驾驶汽车障碍物的传感器主要采用激光雷达。
在障碍物检测研究过程中,研究人员研究出了许多以激光雷达为传感器的障碍物检测方法,这里主要介绍两种,即基于栅格地图的障碍物聚类检测方法和多帧数据跟踪的方法。基于栅格地图的障碍物聚类检测方法可检测最低级别的障碍物,在同步定位和建图过程中,会形成一个障碍物占据网格图,然后对得到的栅格地图进行预处理,删除对结果影响不大的噪声点,完成对传感器信息的预处理,预处理过程完成后要对障碍物信息进行聚类,聚类可以使属于同一个障碍物的点聚类到一起,将属于不同障碍物的点分开,防止产生误检, 但使用该种方法计算量较大,计算速度较慢,不能满足无人车障碍物检测的实时性要求,而且该种方法对周边环境变化不够敏感[9]。
对于第二种方法,首先需要从传感器数据中提取出障碍物信息,然后从激光雷达中获取该障碍物的每帧数据,将各帧数据中的障碍物信息进行匹配,并对障碍物进行持续跟踪,这种方法相对简单,是用于障碍物检测和跟踪的最重要的方法之一。
根据激光雷达的类型,障碍物检测跟踪方法一般可以分为两种类型,这两种方法分别选用二维激光雷达和三维激光雷达作为完成环境感知的传感器。Mendes提出了一种以单线激光雷达为环境感知传感器的障碍物检测方法,并利用该方法设计了无人驾驶汽车的Cybercar避障系统。Furstenberg提出了一种以多层激光雷达为环境感知传感器的的障碍物检测方法,该方法可以减少在无人驾驶车辆的驾驶期间由俯仰角引起的错误检测。选用二维激光雷达作为传感器得到的障碍物数据较为简单,处理起来较为简单,这样使障碍物检测的速度较快,符合无人车障碍物检测的实时性要求,但另一方面,由于得到的数据较为简单,可能会增加误检和漏检的概率。与二维激光雷达相比,采用三维激光雷达可以获得更丰富细致的障碍物信息。而且三维激光雷达视野更开阔,信息更加密集,但直接在三维空间进行数据处理,匹配和跟踪障碍的难度过高,无法满足无人驾驶汽车的实时要求,同时这还可能会失去障碍物的三维特征,导致错误匹配率更高,并且使运动状态的计算错误更大。
1.2.3 三维激光雷达传感器介绍
本课题使用的传感器是Velodyne公司生产的VLP-16十六线三维激光雷达。该款激光雷达传感器具有以下优点,首先其扫描速度较快,光学相控阵的扫描速度取决于所用材料的电子学特性和器件的结构,一般都可以达到MHz量级以上。同时其保留了电机转速可调节的功能,可以实时上传周围距离和反射率的测量值。其支持两次回波接收,可以测量第一次回波和最后一次回波的距离值和反射强度值。而且其重量较轻,只有830g,非常适合安装在小型无人机和小型移动机器人上。

图1.1 VLP-16三维激光雷达
1.3 本文研究内容
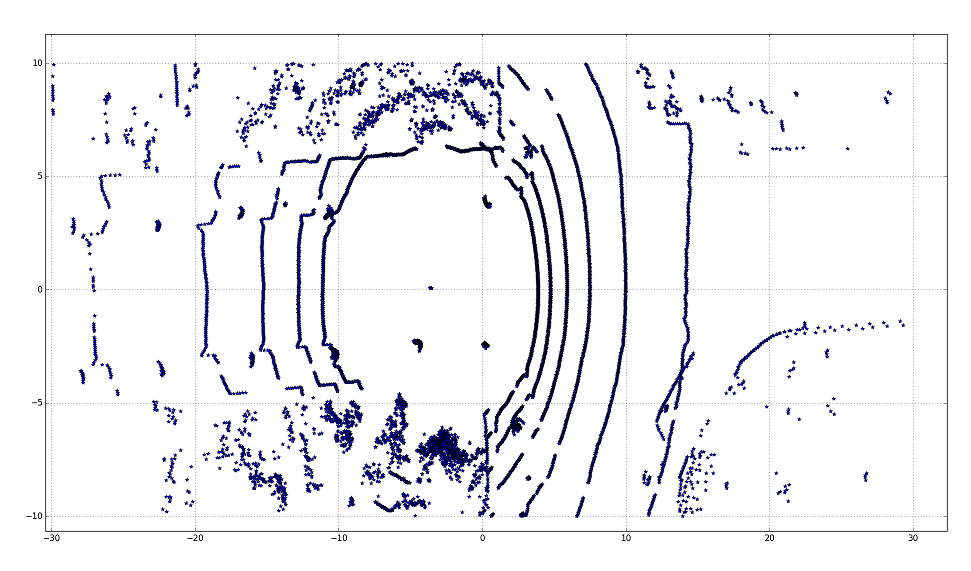
本文提出了一种基于三维激光雷达的障碍物检测方法,本文以Velodyne16线三维激光雷达作为主要传感器,首先进行激光雷达的标定,将激光雷达坐标系下的原始点云转化为车辆坐标系下的点云数据,然后建立栅格地图,本文采用最大最小值高度图法建立栅格地图,即求取每个栅格内所有点的最大z坐标差值,当该差值大于设定的阈值时就认为该栅格为障碍物栅格,否则把其看做非障碍物栅格,从而得到障碍点筛选结果,以此筛选结果为基础,采用DBSCAN算法进行障碍物点的聚类,将属于同一个障碍物的点聚类到一起,然后采用最小凸包法与模糊线段法结合的方法来得到聚类后的障碍物的最小外接矩形,从而完成障碍物检测的目标[10]。
第2章 激光雷达数据采集与标定
2.1 三维激光雷达的安装
该项目使用的三维激光雷达是Velodyne公司生产的的VLP-16三维激光雷达。由于其性能优良,经常被应用于机器人,导航,测量和无人驾驶驾驶。在使用之前,需要设计安装机构并对其外参进行标定由于其旋转结构,三维激光雷达一般采用水平安装在车辆顶部的方法,以获得360°视场。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: