无人驾驶车辆轨迹跟踪控制算法设计毕业论文
2020-04-13 11:07:42
摘 要
随着目前全世界范围内发生的交通事故及汽车保有量的不断増加,相较于之前人们对交通安全更加重视,构建智能交通系统的任务相比其他方面研发显得更加紧急。建立高效稳定的轨迹跟踪控制系统是无人驾驶车辆实现智能化和实用化的必要条件。本文主要研究的问题:控制车辆在不同的车速、路况、转弯曲率等因素下进行准确转向。车辆转向在不同车速下有不同的代数以及几何关系,例如车辆运动学模型以及车辆动力学模型。本文通过不同模型建立相应的轨迹跟踪控制模型。
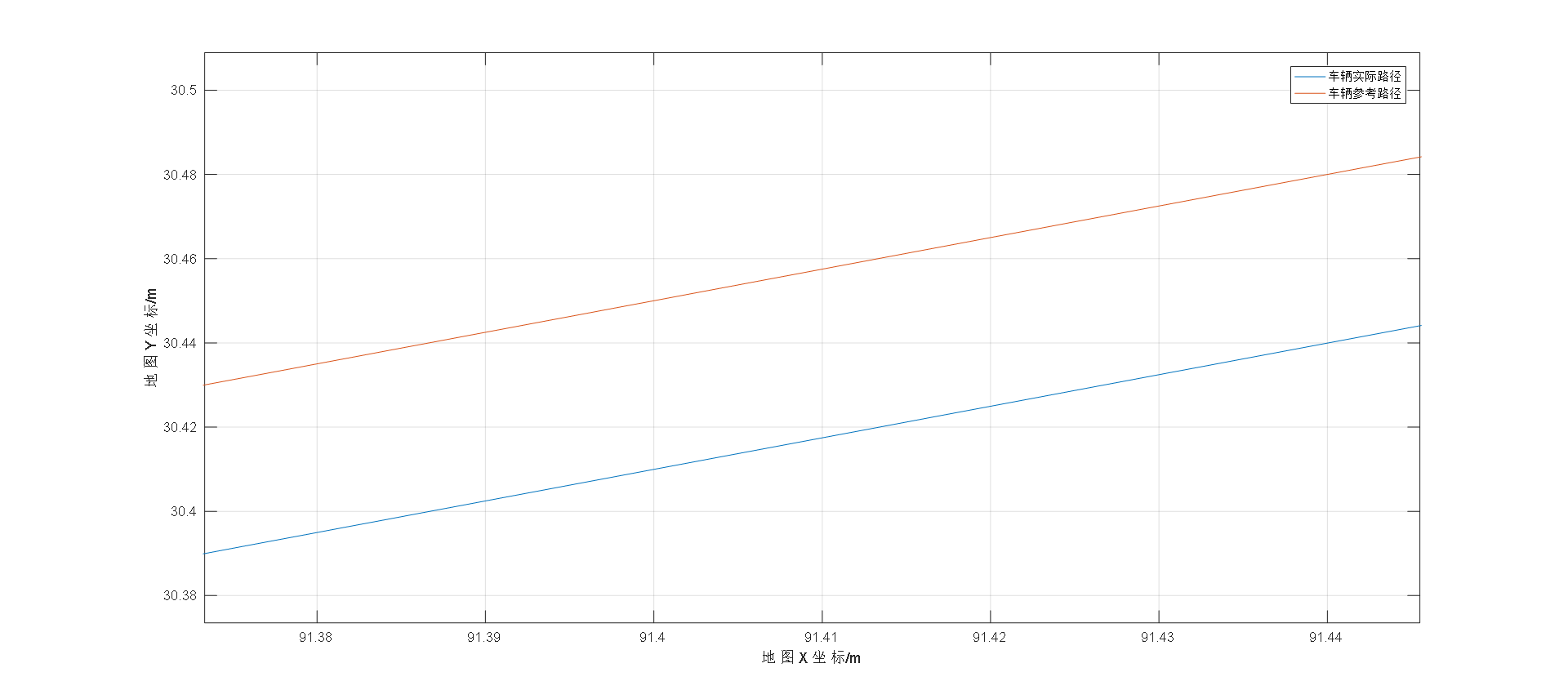
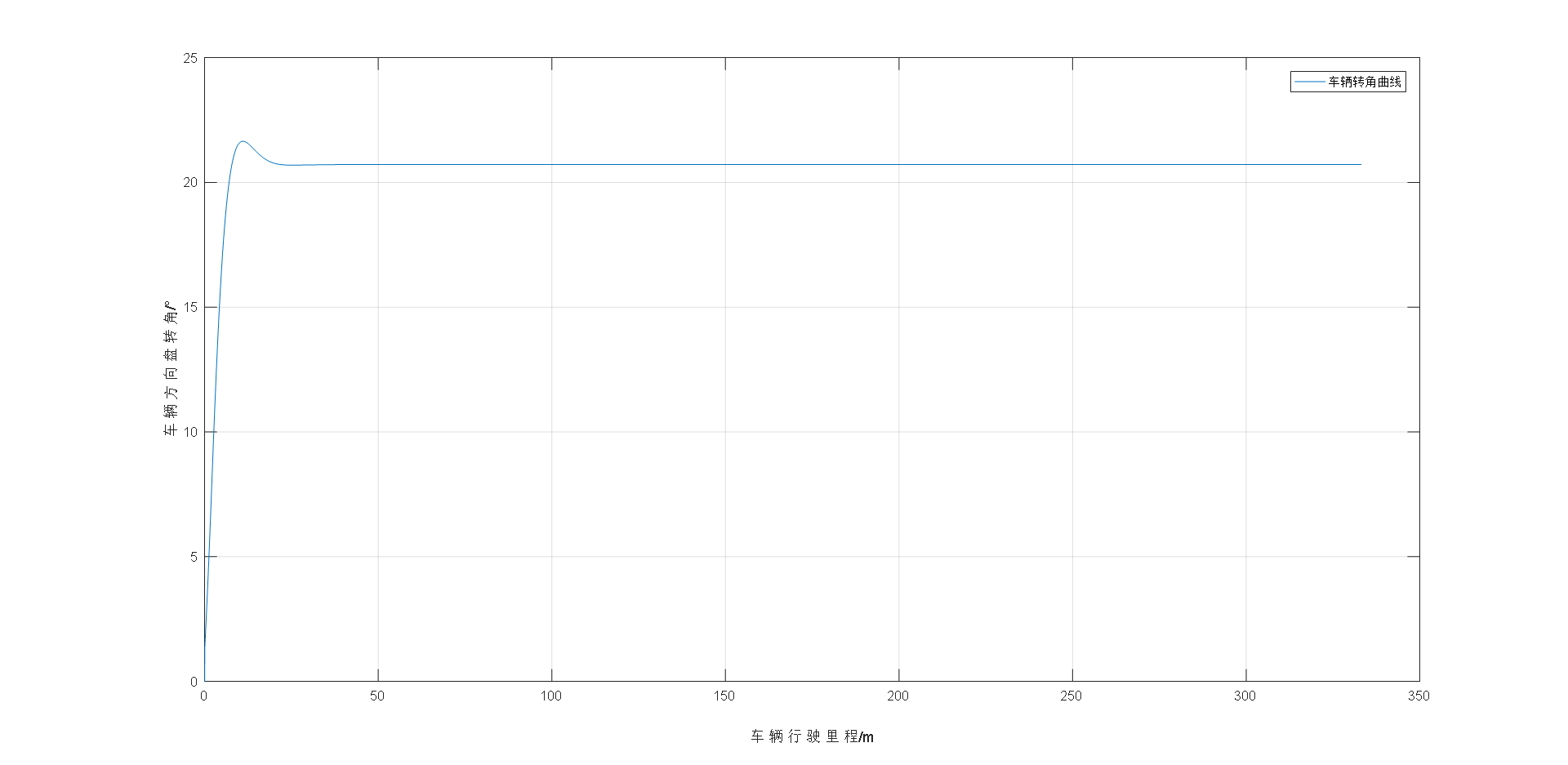
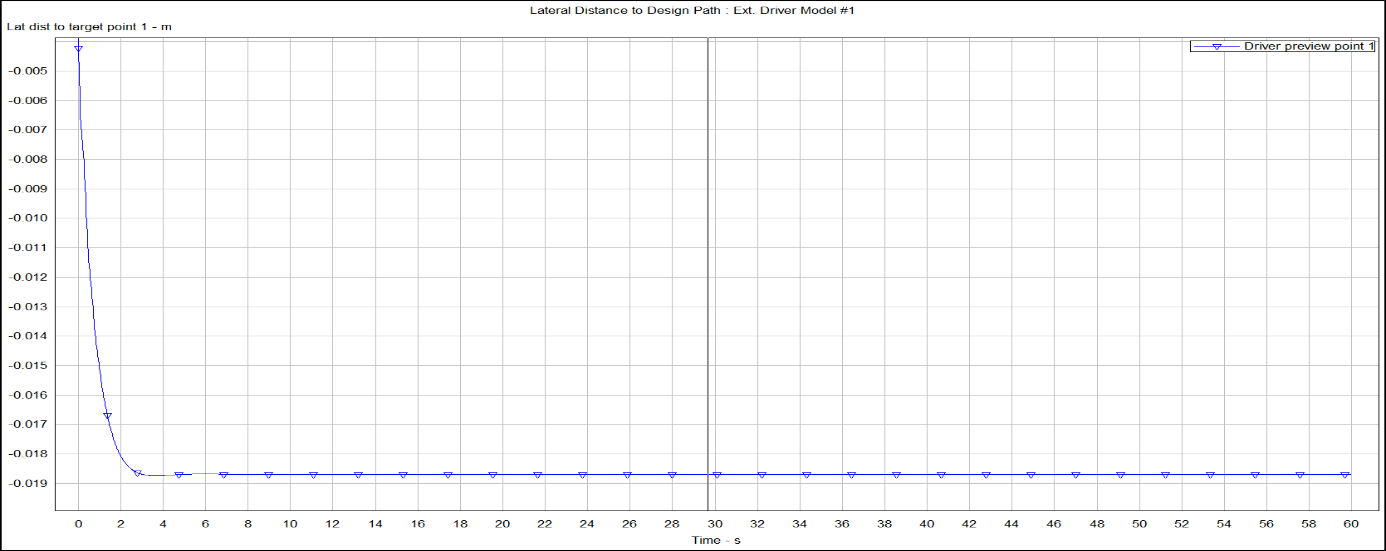
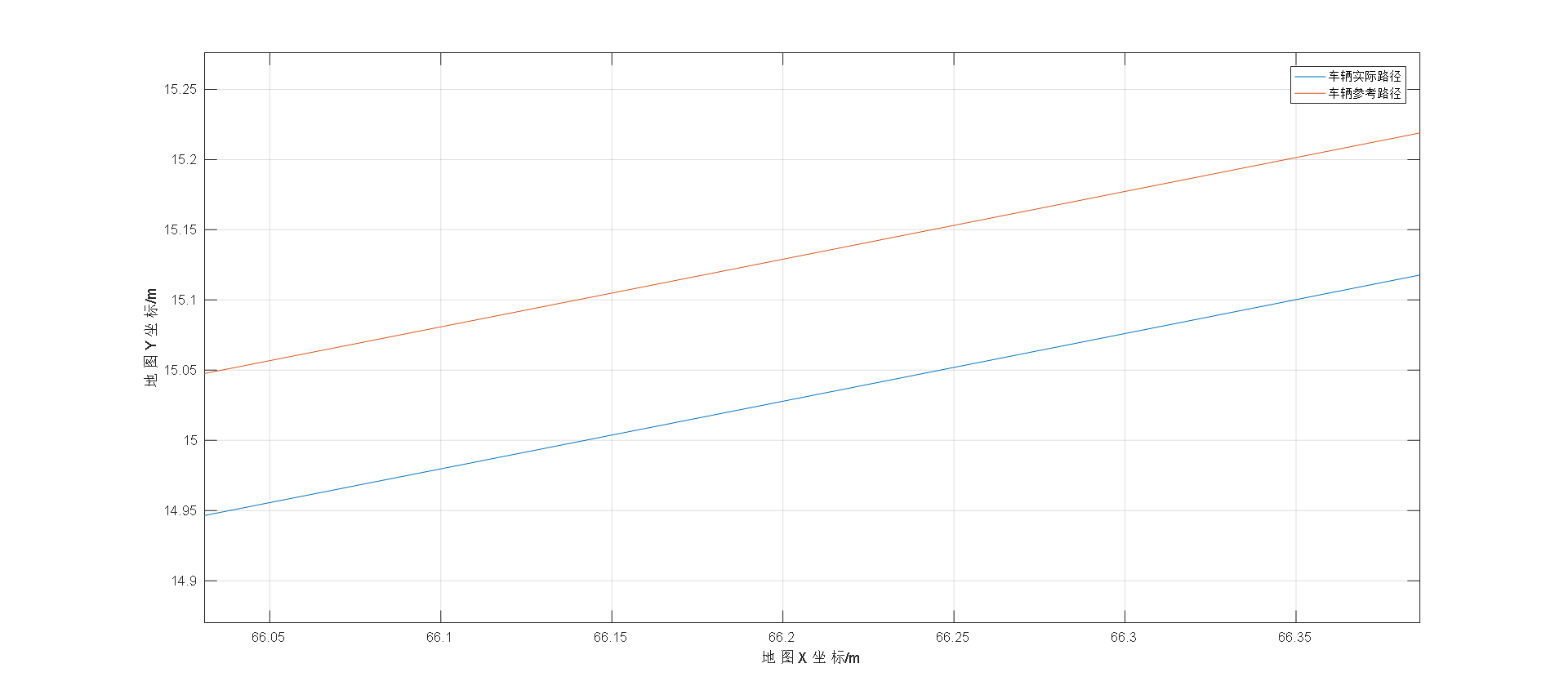
本次设计第一部分参照车辆操纵控制学的相关书籍,根据车辆转向的几何学关系和运动学关系,得到车辆运动学模型。车辆在高速行驶时车轮受到侧向力,结合运动学模型并且考虑侧向力的影响,得到车辆动力学模型。本文以运动学模型为基础根据最佳预瞄点理论,构建对应的控制模型,进行Carsim和Matlab/Simulink的联合仿真。根据设计评价要求,这次仿真在两种模拟校园路况下进行,记录相关数据并绘制图像。本文根据设计要求评价运动学控制器的控制性能,则需要设定评价标准,标准以参考路径与实际路径的偏差以及仿真过程中转向盘转角为参考。因控制器在某些路况下控制性能的不足,本文将对其进行控制的优化。最后为满足车辆高速行驶的轨迹跟踪要求,本文进行了基于运动学模型的控制器搭建,并对仿真结果作出评价。
关键词:无人驾驶车辆;模型预测控制;运动学模型;动力学模型
Abstract
With the increasing incidence of traffic accidents in the world and the constant increase of car ownership, people focus more on the safety of traffic, and the task of constructing intelligent transportation system is becoming more and more urgent. The establishment of an efficient and stable trajectory tracking control system is a necessary condition for realizing the intellectualization and practicability of the driverless vehicle. The main problem of this thesis is to control the vehicle steering accurately under different speed, road condition and curvature. Vehicle steering has different algebraic and geometric relations at different speeds, such as vehicle kinematics model and vehicle dynamics model. In this thesis, a trajectory tracking control model is established through different models.
The first part of the design is based on the related books of vehicle control and control, and the vehicle kinematics model is obtained according to the geometric and kinematic relations of vehicle steering. When the vehicle is running at high speed, the wheel is subjected to lateral force, combined with the kinematic model and the lateral force is considered, and the vehicle dynamics model is obtained. Based on the kinematics model, the corresponding control model is constructed according to the theory of optimal preview, and the joint simulation of Carsim and Matlab/Simulink is carried out. According to the design evaluation requirements, the simulation is carried out on two kinds of simulated campus road conditions, recording relevant data and drawing images. In this thesis, according to the design requirements, the evaluation of the control performance of the kinematic controller should be evaluated. The evaluation criteria should be set, the standard is the deviation of the reference path and the actual path, and the steering angle of the steering wheel in the simulation process. Because of the lack of control performance of the controller under some road conditions, this thesis optimizes its control. Finally, in order to meet the requirements of high-speed vehicle trajectory tracking, this thesis builds a controller based on kinematics model and evaluates the simulation results.
Key Words : Unmanned Vehicle; Model Predictive Control; Vehicle Dynamics Model;Vehicle Kinematics Model
目录
摘要 III
Abstract IV
第1章 绪论 1
1.1选题的依据、目的和意义 1
1.2国内外研究现状及发展趋势 1
1.2.1国内外无人驾驶发展历程 1
1.2.2国内外无人驾驶汽车轨迹跟踪算法发展历程 2
第2章 车辆模型 4
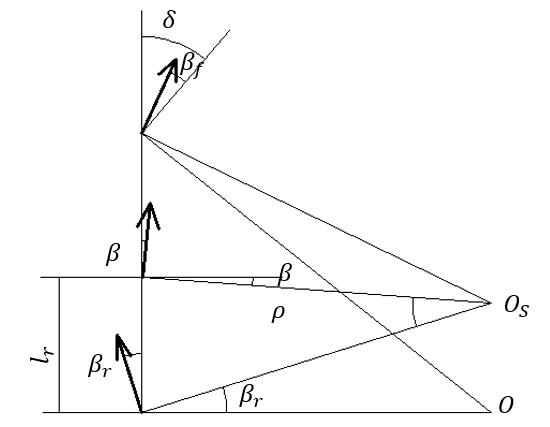
2.1车辆运动学模型 5
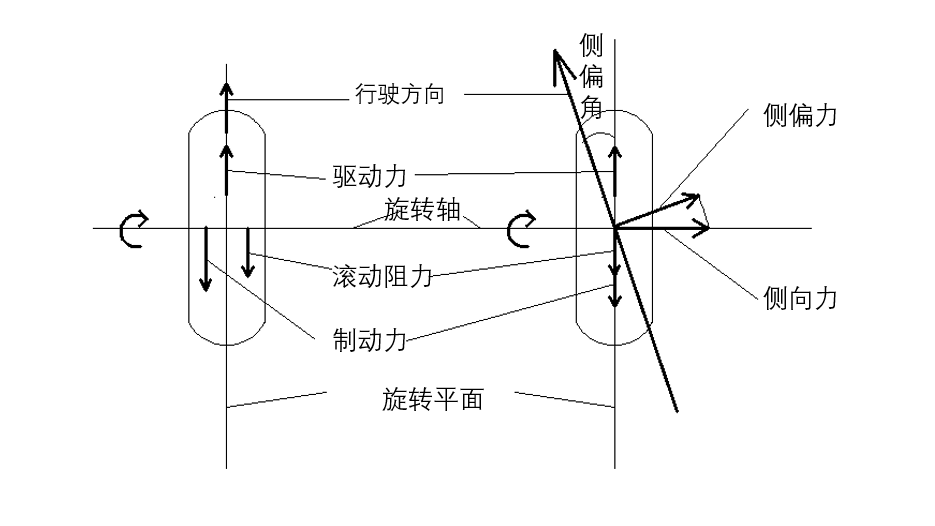
2.2车辆动力学模型 6
第3章 基于运动学模型的轨迹跟踪控制 9
3.1最佳预瞄理论 9
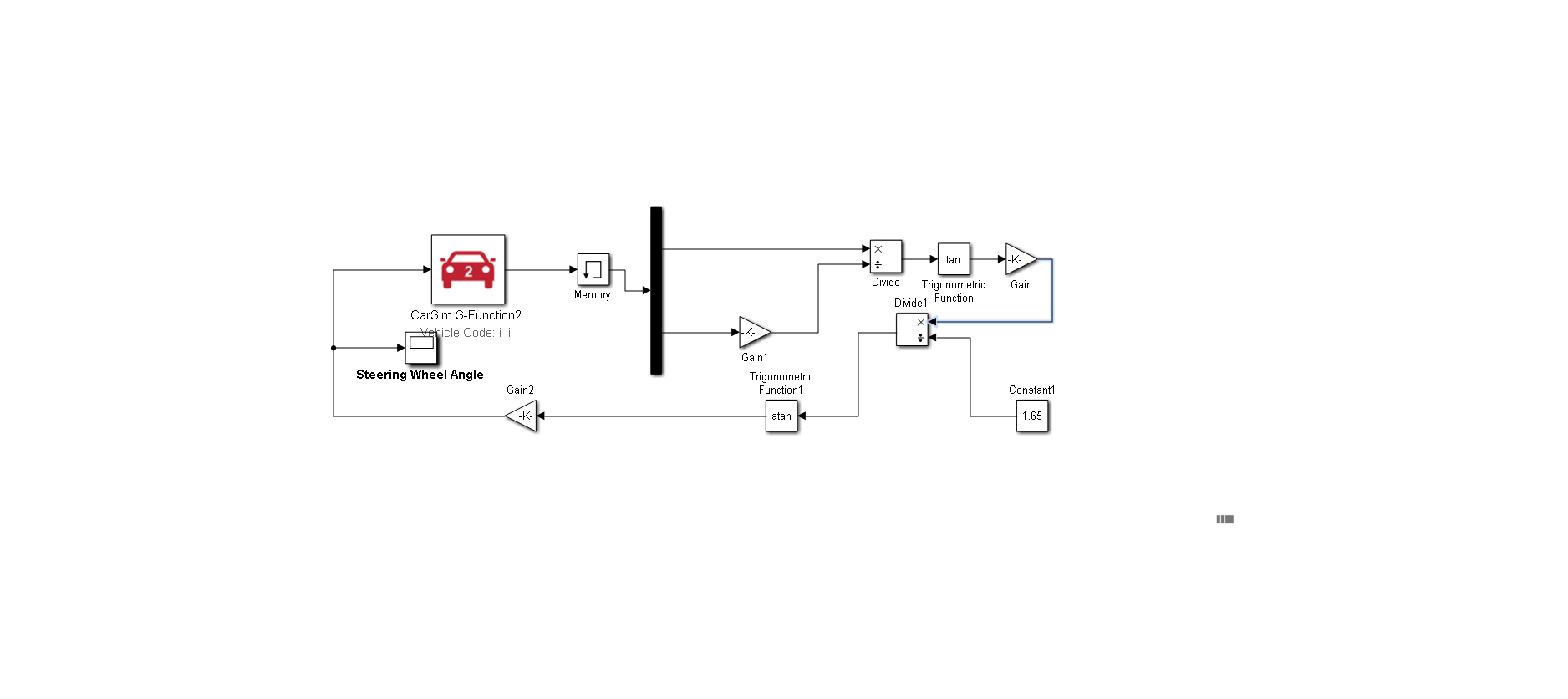
3.2基于运动学模型的控制策略开发 9
3.3典型场景测试与验证 11
3.3.1环岛地图轨迹跟踪测试 11
3.3.2直角转弯轨迹跟踪控制 16
3.4基于转向修正的轨迹跟踪控制优化 18
第4章 基于动力学模型的轨迹跟踪控制 21
4.1基于动力学模型的控制策略开发 21
4.2直角转弯测试与验证 22
第5章 总结与展望 24
5.1本文研究成果 24
5.2未来工作展望 24
参考文献 25
致谢 27
第1章 绪论
1.1选题的依据、目的和意义
随着全世界范围内交通意外发生率的上升、汽车市场保有量的増加以及交通安全问题日益严峻,构建和完善智能交通系统的目标工作变得更加紧急[1]。智能汽车技术的不断完善不仅有助于降低汽车的交通事故数量,同时可以减少驾驶员因驾驶疲劳和驾驶员不良习惯造成能源浪费的情况发生,而且无人驾驶在工业制造、军事、航空航天等领域有着巨大的需求和相当良好的未来前景,因此它在全世界范围内引起广泛关注[2]。在控制器控制下车辆能够完成高效而稳定的轨迹跟踪是实现无人驾驶车辆精准性的重要基础[3]。在现实综合而复杂道路环境中,由于驾驶场景的多样性、行人与其他机动车的难预测性及乘客对于行车安全性、经济型和舒适性要求的提高,现有的车辆控制策略与轨迹跟踪控制己无法给出一个合理的解决方案[4]。但在日常驾驶中,驾驶员有时候还需要根据路面实际情况以及交通标志等原因作出相应的应对,因此,开发高效稳定的轨迹跟踪控制系统是极其必要的。开发和完善准确的轨迹跟踪系统将提高车辆的行车安全性,降低事故发生的概率,同时降低了因驾驶员操作不当或不良习惯导致事故的概率,而且高效的轨迹跟踪将有助于降低车辆行驶的燃油消耗率和车辆在怠速的不良排放,因而开发研究一个高效稳定的轨迹跟踪控制系统是有着极其重要的战略意义的。
1.2国内外研究现状及发展趋势
1.2.1国内外无人驾驶发展历程
从约1970年开始,国外就开展了陆地无人驾驶车辆的研究,并且取得了有划时代意义的研究成果。国外研究初期对无人驾驶车辆的开发主要应用于军用方面,它的发展主要经历了3个阶段:在20世纪80年代之前,由于无人驾驶车辆受限于硬件技术和计算机、图形处理、数据融合等关键技术,这段时间的无人驾驶车辆主要以遥控的方式进行控制。1980年以后,随着自主车辆技术及计算机、图形处理技术突破性的发展,无人驾驶车辆得以进一步发展,出现了多种自主和半自主移动平台,这些平台主要应用于军用,同时少部分用于商用,这时无人驾驶车辆用于执行扫雷、排爆、侦察等任务。自20世纪90年代以来,由于在计算机、传感器、人工智能、图片处理等技术方面的突破,半自主型无人驾驶车辆的发展更加迅猛,这时候的无人驾驶与商业的联系更加紧密[19]。
中国的无人驾驶研究始于约1986年,上世纪八十年代我国立项了“遥控驾驶的防核化侦察车”项目,参与该项目的是联合哈尔滨工业大学、国防科技大学以及沈阳自动化研究所这三家主要由大学组成的研究团队。在863计划颁布后,国家加大了对无人驾驶以及无人车的资金投入并且设立国家自然科学基金会,更多的大学与机构有充足的经费进行无人车的研究,此时国内的无人驾驶研究才初具格局。在八五期间,我国成功完成经自主研发且制造的ATB-1(AutonomousTestBed-1)无人车,该无人车由北京理工大学、国防科技大学等五所大学联合研制,这是我国第一辆自主研发并且能自主行驶的测试样车。同时无人驾驶在中国的发展离不开各种比赛,于2009年中国首届智能车未来挑战赛在西安举行,在比赛发展的几年里共吸引了数十家研究单位的数十辆无人驾驶车辆先后参加该项比赛。智能车未来挑战赛很大程度地促进了无人驾驶的技术研究进程。
1.2.2国内外无人驾驶汽车轨迹跟踪算法发展历程
无人驾驶车辆的轨迹跟踪控制作为无人驾驶车辆的几大关键技术之一,它主要是研究如何通过控制车辆的转向系统以及动力系统/制动系统实现车辆能够以拟定的速度沿着参考路径行驶,也就是通过车辆横向以及纵向的控制从而实现车辆的路径轨迹跟踪,从而实现车辆的无人驾驶。目前绝大部分关于轨迹跟随的研究方法中,主要是基于预瞄理论和模型预测理论这两个理论衍生得到的。
1.2.2.1预瞄理论的提出以及发展
美国研究人员Mac Adam在1980年通过研究预测控制驾驶员模型,为了实现车辆对参考路线的追踪功能,就此提出了预瞄跟踪最优控制方法,并将该方法应用于车辆的路径追踪中取得了相当显著的成效。最早在1982年我国郭孔辉等学者提出预瞄跟随系统理论,建立了驾驶员操纵控制与预瞄点最优曲率模型。预瞄理论近些年的发展主要是建立了驾驶员模糊控制模型,这类模型由驾驶员与汽车闭环操纵的试验数据中辨识得到车辆模型,并用模糊数学及其控制理论来描述驾驶员的操纵行为[3]。
1.2.2.2模型预测的提出
模型预测控制算法最早出现在西方国家的工业领域中,当时计算机技术开始进入工业生产中,模型预测控制算法就是基于计算机技术优化工业生产的控制。根据所采用模型的不同,模型预测控制逐渐衍生出其他分支。 20世纪80年代,Cutler 等人提出了以阶跃响应作为控制中的动态参考建立动态矩阵控制模型(Dynamic Matrix Control, DMC),动态矩阵控制模型是将对应参数输入模型中,根据动态矩阵计算得到所需结果,同时通过输入参数受输出控制的影响而变化形成反馈控制。1987 年,Clarke 等人提出了以时间序列和在线识别模型的主要参数的广义预测控制(Generalized Predictive Control, GPC)。经过近二十多年的深入研究和发展,其理论和方法日益完善,并得到了广泛的实际应用。
1.2.2.3轨迹跟踪控制算法的目前成果
目前国内外主要在无人驾驶车辆轨迹跟踪算法的方面的主要研究成果如下。
韩国Yoon等人组成的研究团队以非线性车辆模型和轮胎模型为参考,设计了非线性模型预测控制器,该控制器把车辆行驶模型非线性处理,并将该模型进行闭环优化控制,所得控制器主要用于无人驾驶车辆机动平台的横纵向跟踪控制,同时实现了无人驾驶车辆避开障碍物的功能。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: