水下机器人建模与定深控制研究毕业论文
2020-02-18 10:37:22
摘 要
近年来,作为海洋勘探开发的重要工具,水下机器人的研制已成为各国海洋技术研发重点之一。由于可以减少成本、降低能耗,故拥有较少驱动器的欠驱动智能水下机器人成为水下机器人研究的热点。欠驱动水下机器人通常采用桨翼舵联合操纵方式,主推进器为纵向运动提供动力,舵、翼用于实现升沉运动及转艏运动。水下机器人的运动具有高非线性及强耦合性等特点,且在近水面航行中,易受海流、波动干扰,导致水下机器人运动状态极不稳定,因此如何对在近水面运行的水下机器人加以精确控制是水下机器人研究工作的难点之一。
本文以REMUS AUV为研究对象。首先根据所查阅的文献,建立欠驱动AUV六自由度运动数学模型,并针对REMUS AUV的实际运行特点,对运动模型加以简化,从而得到垂直面三自由度模型。然后针对近水面航行的AUV所受的波浪干扰进行仿真分析。之后,在所得运动模型基础上,以波浪干扰力作为作为主要扰动,对自适应反步滑模定深控制律进行推导。最后在MATLAB SIMULINK仿真平台上进行定深控制仿真实验,与传统PID控制器仿真结果加以比较,验证了自适应反步滑模控制律的有效性及鲁棒性。
关键词:欠驱动AUV;近水面航行;反步滑模控制
Abstract
In recent years, as an important tool for marine exploration and development, the development of underwater robots has become one of the key research and development points of marine technology in various countries. Under-driven intelligent underwater robots with fewer drivers have become a hotspot in underwater robot research because of the reduction in cost and energy consumption. The underactuated underwater robot usually adopts the joint operation mode of the rudders, propellers and wings. The main propellers can provide the power for the longitudinal motion, and the sway motion and the heave motion are controlled by rudders and wings. The motion of underwater robots is highly non-linear and strong coupling, and its working condition is vulnerable to current and wave interference in the navigation near the surface, which makes the underwater robots extremely unstable. Therefore, precise control of underwater robots running near the surface is one of the difficulties in the research of underwater robots.
This article takes REMUS AUV as the research object. Firstly, based on the Searched literature, a mathematical model of six-degree-of-freedom motion of under-actuated AUV is established. According to the actual operating characteristics of REMUS AUV, the motion model is simplified and the vertical plane three-degree-of-freedom model is obtained. Then, the wave interference of the AUV sailing near the surface is simulated to study the influence of wave force and wave moment on the depth motion of AUV. After that, based on the obtained motion model, the adaptive anti-step sliding mode control law is derived by using the wave interference force as the main disturbance. Finally, the simulation experiment of depth control is carried out on the MATLAB SIMULINK simulation platform. Compared with the simulation results of the traditional PID controller, the effectiveness and robustness of the adaptive backstepping sliding mode control law are verified.
Key Words:Underactuated AUV; Sailing near surface; Backstepping sliding mode control
目 录
摘 要 i
Abstract ii
第1章 绪论 1
1.1 课题研究背景及意义 1
1.2课题国内外研究现状 2
1.2.1自主式水下机器人研究与发展现状 2
1.2.2 水下机器人运动控制研究国内外现状 3
1.3 近水面作业水下机器人运动特点 5
1.4本文主要研究内容 5
第2章 水下机器人运动模型建立及分析 7
2.1引言 7
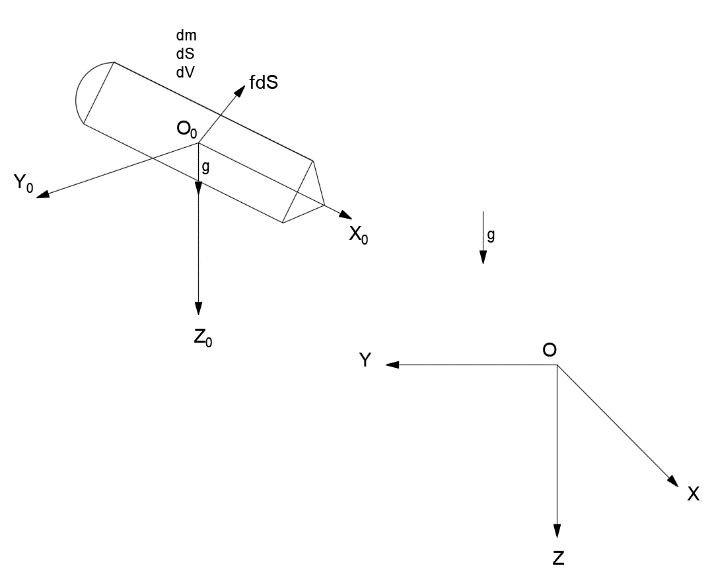
2.2水下机器人运动控制坐标系 7
2.2.1坐标系 7
2.2.2大地坐标系与本体坐标系之间的变换 8
2.3水下机器人空间运动方程 9
2.4水下机器人近水面运动方程 12
2.5本章小结 13
第3章 波浪干扰力的计算与分析 14
3.1 引言 14
3.2 波浪力的计算 14
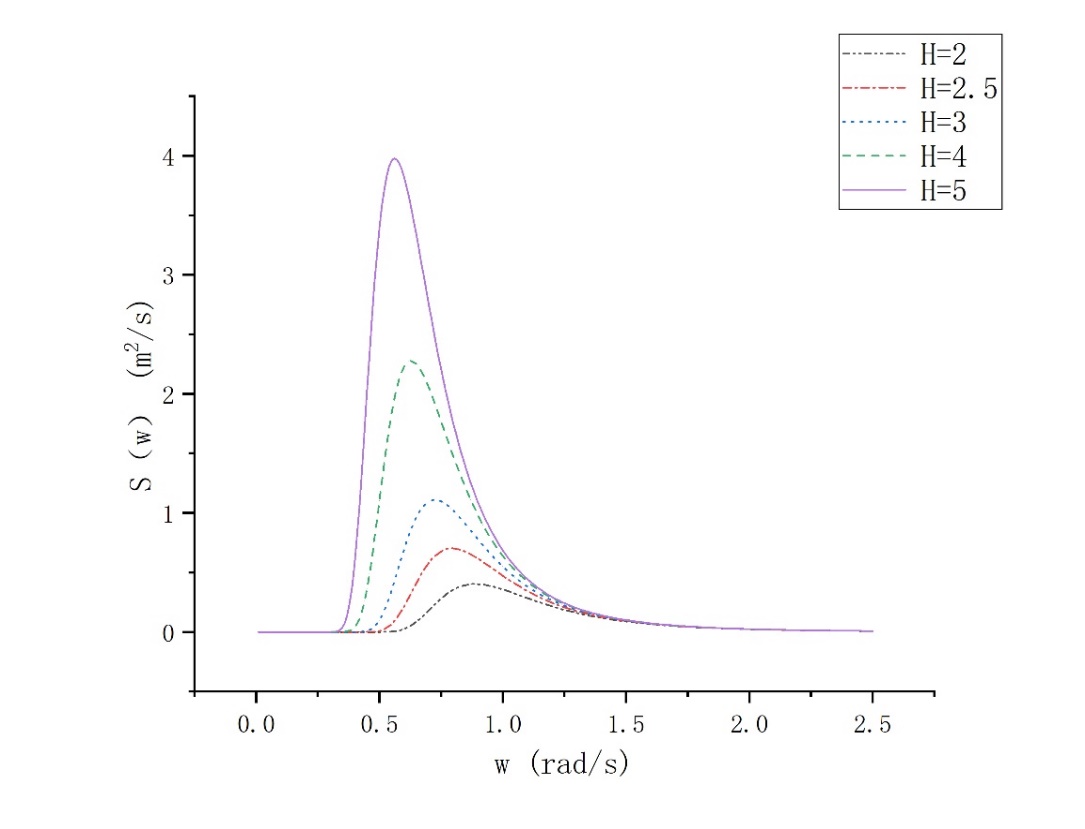
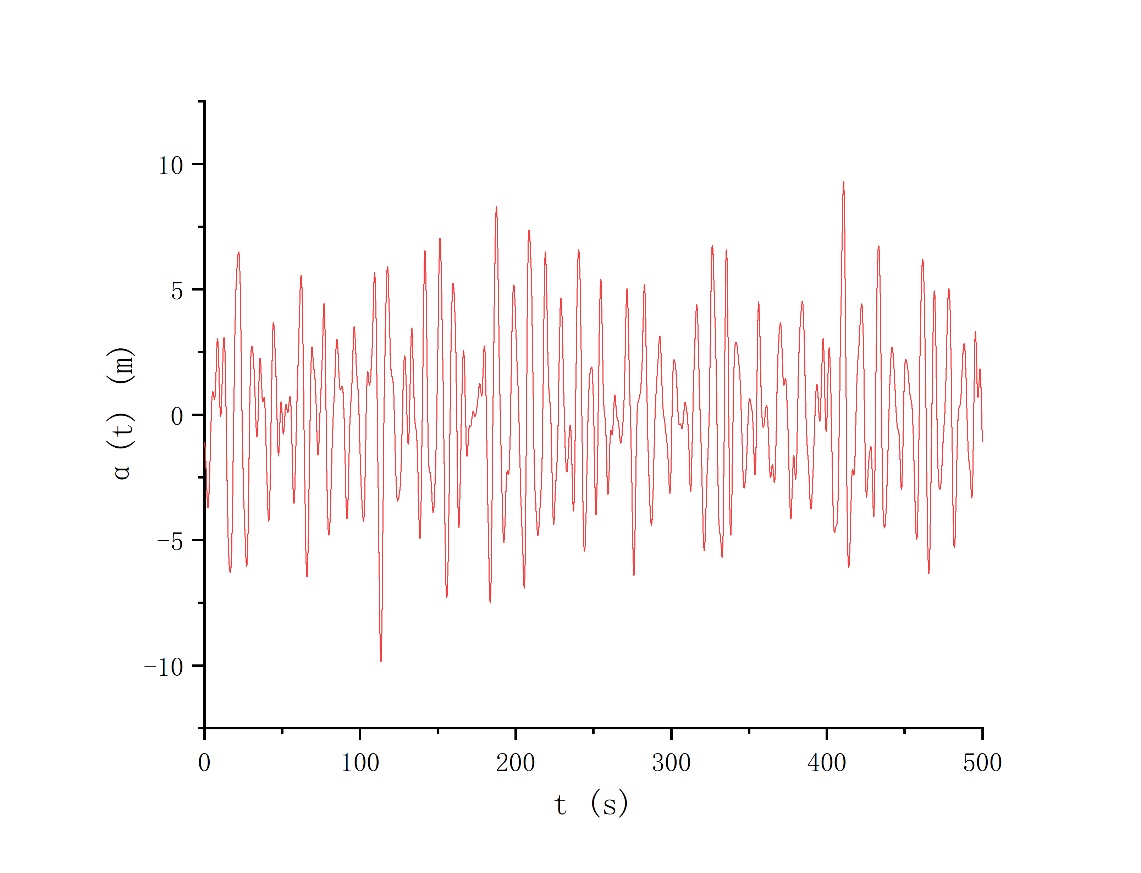
3.2.1海浪建模 14
3.2.2一阶波浪力计算 16
3.2.3二阶波浪力计算 16
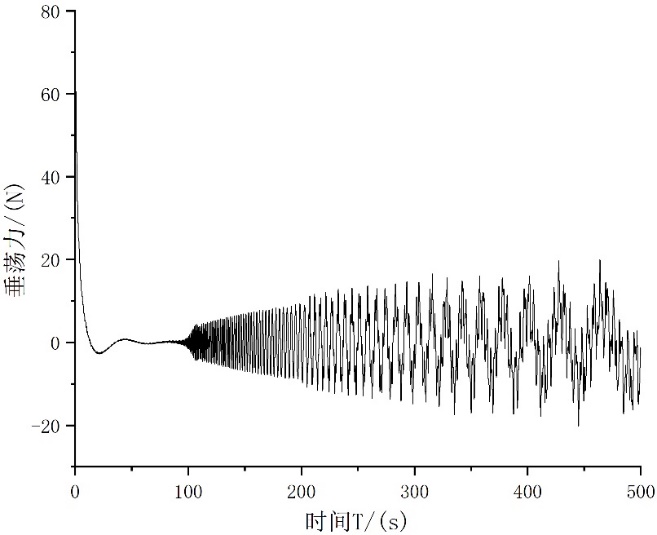
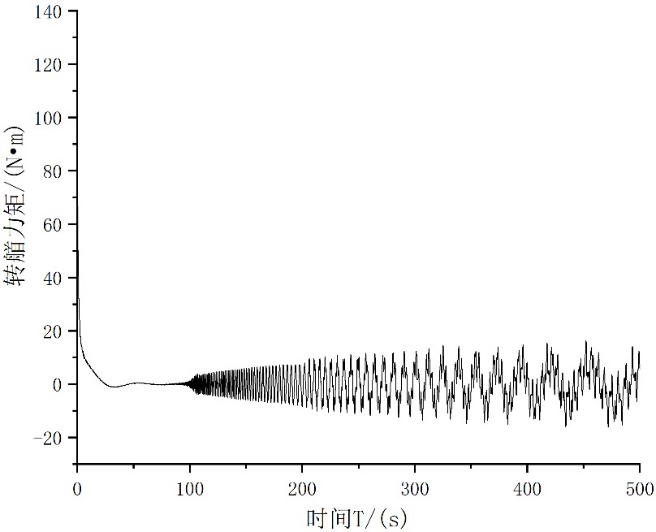
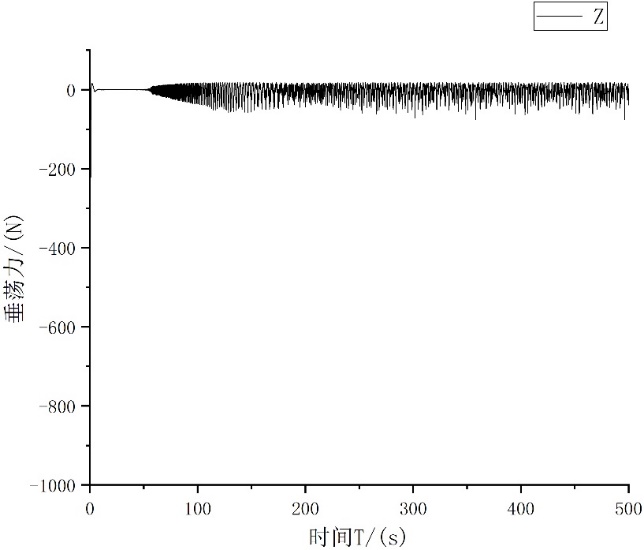
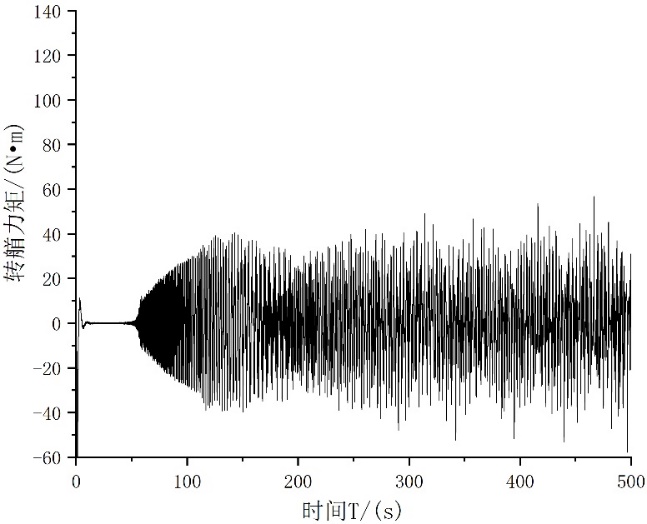
3.3 波浪力的仿真与分析 17
3.4 本章小结 19
第4章 水下机器人定深控制研究 20
4.1 引言 20
4.2 PID定深控制系统 20
4.3 非线性控制理论基础介绍 22
4.3.1反步法 22
4.3.2 滑模变结构控制法 22
4.4自适应反步滑模定深控制器设计 23
4.5仿真实验及结果分析 26
4.5.1静水域定深控制实验 26
4.5.2波浪力作用下定深控制实验 28
4.6本章小结 30
第5章 总结与展望 31
5.1本文总结 31
5.2展望 31
参考文献 32
致 谢 34
第1章 绪论
1.1 课题研究背景及意义
水下机器人是一种能够在水下危险环境中进行极限作业的机器人,又称潜水器。面对当今社会资源短缺,人口膨胀等严重问题,海洋资源开发利用得到国内外广泛关注。作为可以将人类从复杂危险的海洋环境下解放的工作载体,水下机器人在海洋开发作业中地位日益增加。例如,我国自主研制的“潜龙二号”在 2018年,经过30多小时的近海底作业,在地形起伏1800多米的区域内,获得了大量的精细地形地貌数据和多种传感器探测数据[1]。同时,水下机器人也在不同应用领域发挥着重要作用:水下机器人可以利用于水利工程、水下搜救等多种领域。例如,Teledyne SeaBotix水下爬行机器公司生产的SeaBotix LBV系列产品被San Diego公司用于Pro-ROV服务中,在3周多时间对怀俄明州3座大坝的安全检查[2]。又如,在对马航MH370搜救工作,美军采用的自主水下机器人蓝鳍-21进行搜寻黑匣子工作[3]。
随着水下机器人的发展,无论在军用还是民用,对其性能要求也变得越来越高。水下机器人在实际航行中,最重要的两个性能为定深性能和定向性能。尤其在水下机器人执行近水面航行任务时,由于受到海浪及海流的干扰,水下机器人的运动状态变化更为剧烈,对其操作性能的影响更为严重。海浪一阶波浪力是一种高频周期干扰力,在其干扰下会使水下机器人产生剧烈地摇荡运动,影响水下机器人的正常工作,甚至影响其安全性能。而二阶波浪力(又称波吸力)是一种指向水面的力,在其干扰下会使水下机器人向水面抛甩,导致潜深显著减小,同时二阶波浪力随潜深减小而急剧增大[4],这会进一步导致水下机器人浮出水面,故而二阶波浪力会严重影响水下机器人在近水面定深性能。因此分析在近水面工作时水下机器人运动状态,并为其设计一种控制系统,对提高水下机器人的操作性能至关重要。
现今水下机器人为了降低成本和质量,多采用主推加艉十字舵的驱动配置模式[5],导致其无法自主产生侧向和垂向推力,故属于欠驱动系统。水下机器人在执行任务中,要求其具有在环境干扰作用下保持预期航向运动的能力。针对欠驱动水下航行器近水面航行的控制是一种非线性、多变量、强耦合、强干扰的联合控制。水下机器人近水面定深航行控制方法的研究对提高水下机器人的自动化水平具有重要的意义。
1.2课题国内外研究现状
1.2.1自主式水下机器人研究与发展现状
自主式水下机器人(AUV)由其无人无缆、自治能力强、活动范围大、适应性好等特点一直作为人类海洋技术研究发展的热点之一。
美国伍兹翟尔海洋研究所的Remus系列[6] AUV是较为成功的AUV系列,2009年在Remus-6000 AUV的协助下迅速找到了失踪于大西洋海域的法航447号航班[5]。REMUS 6000(如图1.1)用于测量海水的特性,并且通过通过传感器进行海底成像。REMUS 6000 AUV的主要包括航行器、测深仪、侧扫及沉积层穿透声呐、导航装置和通信装置以及其他相关设备。REMUS 6000自主水下无人水下航行器也可根据用户需求配置专用传感器,以适应特殊要求。REMUS 6000的主要参数如下:航行器直径71cm,航行器长度3.96m,航行器空气中重量862kg,最大工作深度6000m,续航力22h(典型速度),航速最大4.5kn。
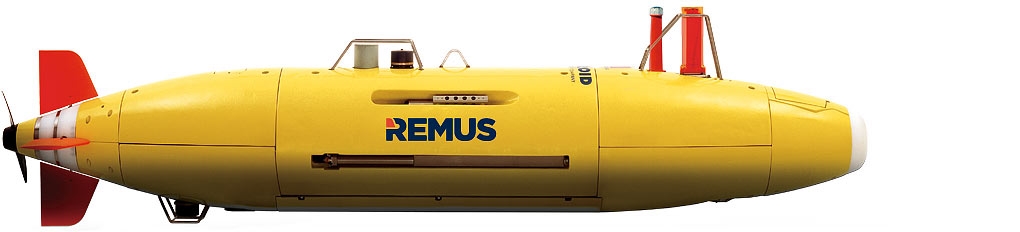
图1.1 水下机器人REMUS 6000
在2014年,美国海军与美国Phoenix International公司开始合作,使用水下机器人蓝鳍-21(Bluefin-21)在南印度洋中开展了马航MH370的搜救工作,并实现了针对95%核心区域的搜索。Bluefin-21(如图1.2)是一种高度模块化的自主无人水下航行器,可以携带多种传感器和有效载荷。其电源容量大,能够长时间在大水深条件下工作,并可配合各种应急船舶操作使用。Bluefin-21的主要用途是近海勘测、搜索和救捞、海洋学考察以及考古等等。该型AUV主要技术参数有:航行器直径533mm,长度4930mm,空气中质量750kg,最大工作深度4500m;续航力:标准有效载荷3kn时为25h;航速4.5kn [7]。
图1.2 水下机器人Bluefin-21
我国对于AUV的研究工作起步较晚,但发展很快。其中主要研究单位有中科院沈阳自动化研究所、中国船702研究所及哈尔滨工程大学等。
“潜龙一号”是我国首台自主研制的实用化6000米级AUV(图1.3),主要用于勘探海底多金属结核资源,并对海底地形地貌、地质结构等进行精细调查。2013年9月,“潜龙一号”首次在太平洋海域对多金属结核资源进行调查工作。“潜龙一号”的最大续航时间为30小时,最大工作深度为6000米,其搭载了我国自主研发的测深侧扫声呐、浅地层剖面仪等设备,其工作模式包括大范围声学调查和近海底光学调查。同时,“潜龙一号”定位模式包括长基线和超短基线两种,一般基于任务需求加以选择[1]。

图1.3 水下机器人“潜龙一号”
1.2.2 水下机器人运动控制研究国内外现状
相比于全驱动AUV,欠驱动AUV的推进器数量减少,故而具有质量轻、制造成本低、能量消耗低等优点。因此欠驱动AUV受到广泛关注,成为水下机器人研究的重点之一。
Repoulias等人[8]针对欠驱动AUV在水平面的运动,利用AUV的动力学方程分别计算出参考偏航角速度及位于本体坐标系下的参考速度,并提出了一种欠驱动AUV水平面轨迹规划方法;基于Lyapunov稳定理论,利用反步法设计了一个可以保证跟踪误差无穷小的轨迹跟踪控制器,并通过仿真分析验证控制器的有效性。
Santhakumar等人[9]利用同样方法设计了一个水平面跟踪控制器。同时,他们在所建立的模型中加入了恒定的外界干扰,并通过仿真分析验证控制器的有效性。
Li Jiawang等人[10]利用Lyapunov稳定理论,利用反步法设计了一个轨迹跟踪控制器,解决了欠驱动AUV在垂直面运动过程中进行轨迹跟踪的问题。并采用变质心控制系统替换传统控制输入,解决了传统执行器在低速时失效问题,并通过仿真分析验证控制器的有效性和鲁棒性。
Do等人[11]利用Lyapunov直接法、反步法及参数投影等方法设计了一个鲁棒自适应控制器,解决了只有四个控制输入,受外界干扰,并存在参数不确定性的欠驱动AUV在六自由度上的轨迹跟踪控制。在该控制器控制下,欠驱动AUV的闭环路径跟踪误差可趋近无穷小,并能利用于悬停及点对点导航等控制问题,并通过仿真分析验证控制器的有效性。
Li等人[12]以仅受纵向控制力及俯仰控制力矩的欠驱动AUV为研究对象,研究其在垂直面路径跟踪问题。利用两极坐标间的变换将欠驱动AUV运动学及动力学方程变为一个两输入两输出二阶非线性严格反馈系统,使用反步法设计了一种控制器。同时采用渐进修正方位法,解决了反步设计过程中会出现的奇异问题。利用该控制系统可以保证AUV在极坐标及笛卡尔坐标下的跟踪误差渐近稳定,并通过仿真分析验证控制器的有效性。
Nail等人[13]以仅利用一个艉舵作为控制输入的由俯仰及升沉运动组成的二自由度系统,采用SDRE方法,针对存在参数不确定性的欠驱动AUV垂直面运动加以控制。研究中选取了一次二次型性能指标,通过求解SDRE方程获得中间虚拟控制律,同时引入一松弛变量使所需控制输入幅度维持在一定区间内,并使用中心流型理论验证了AUV模型的深度误差可收敛于无穷小,并通过仿真分析验证控制器的有效性。
Salgado-Jimenez等人[14]同样研究了仅在一个艉舵作为控制输入的由俯仰及升沉运动组成的二自由度系统的垂直面控制问题,采用滑模控制方法,并使用二阶滑模控制器以削弱抖振。针对该控制模型、PD控制器及传统滑模控制器进行仿真分析对比,验证了该系统的控制性能更好。
Leonard等人[15]研究了在全驱动AUV在驱动器失效变为欠驱动系统条件下的运动控制问题,提出一种开环控制综合方法,验证了全驱动AUV驱动器失效后控制的可行性,实现了控制权限的自适应调节。Leonard等人主要研究了两个问题:一是以横滚角及俯仰角为控制输入条件下的偏航操纵;二是在研究条件下的悬停操纵。通过实验验证了控制模型的可行性。
近年来,国内一些学者对欠驱动AUV控制也进行了相应研究,部分研究成果如下:
马岭等人[16]利用模糊混合控制策略,针对欠驱动AUV设计了一个鲁棒路径跟踪控制器,主要利用Sugeno型模糊系统,将PD滑模控制器与Terminal滑模控制器连接起来,构建了模糊混合控制器。该控制器充分融合了两控制器的优势,保证无论控制系统离平衡点远近,都能快速收敛,并通过仿真分析验证控制器的有效性。
付江峰等人[17]针对欠驱动AUV水平面直线航行跟踪控制问题进行研究,为解决传统控制方法会导致控制力矩复杂的问题,提出了基于级联系统理论控制力矩的设计方法。并构造了Lyapunov函数,推导出具有全局稳定性的控制力矩,并通过仿真分析验证控制器的有效性。
李家旺等人[18]针对仅由主推动器及一个内部转子驱动的欠驱动AUV系统,研究了其在水平面内的轨迹跟踪问题。建立了存在外界干扰的AUV运动数学模型,采用特定坐标变换对侧向及偏航运动进行解耦。利用Lyapunov直接法,以坐标变换后的模型为控制对象,设计了一种跟踪控制律,保证了跟踪误差收敛性。同时分析了电机控制系统干扰及误差作用,并为针对电机设计了一个控制器,实现整个系统的跟踪误差具有全局稳定性,并通过仿真分析验证控制器的有效性及鲁棒性,能保证欠驱动AUV的跟踪误差全局稳定。
1.3 近水面作业水下机器人运动特点
水下机器人在执行任务时,根据工作任务的不同,会在不同深度条件下航行。无论在执行岸上探测任务,还是进行AUV的回收或进行信息交换等工作,AUV都不可避免地在近海面航行。水下机器人在浅水区及深海区的运动特性存在明显不同,称水下机器人在受风、浪、流等复杂水面干扰明显的深度范围内作业的情况为水下机器人在近水面航行。
在近水面航行的水下机器人所受到风、浪、流等复杂环境干扰力中,波浪力及波浪力矩对水下机器人干扰最为严重。波浪造成的干扰较为复杂,波浪力会导致水下机器人运动状态发生剧烈改变,特别是在高海况下航行时,水下机器人若不加以控制,其运动将处于一种极不稳定的状态。另外在近水面航行过程中,水下机器人的航速较低,其运动的非线性更为显著,波浪的影响也变得显著,这会导致水下机器人运动状态变得更为复杂,导致其控制精度降低,甚至导致控制失稳。如果水下机器人的控制失效,会导致其深度发生剧烈变化,而水下机器人在近水面作业时需保持在精确的深度范围内航行,故而这类控制失稳问题是必须避免的。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: