无人驾驶小车制动系统设计毕业论文
2020-02-18 10:40:32
摘 要
汽车的安全性是汽车设计和制造的重点,而汽车的制动性能是直接影响汽车行驶安全的重要因素,也将影响汽车动力性的发挥。制动系统设计是无人驾驶小车设计中不可缺少的一环,制动系统的好坏从根本上决定着无人驾驶技术的安全性,与无人驾驶技术的发展息息相关。
本文以无人驾驶小车为对象,对无人驾驶小车制动系统的设计方法和过程系统地进行了研究。首先,简要地介绍了制动系统的组成、分类;结合汽车制动系统理论,介绍了相关的参数和技术指标。其次,通过分析各类制动器的特点,确定小车制动系统结构形式;根据整车的参数,对小车制动系统进行分析计算,确定制动盘、制动钳等关键零件的尺寸设计;进行制动力矩测试试验,校核了制动力矩;最后,对相关的零件进行了建模,应用ANSYS Workbench对制动盘进行了静力学分析和制动时的热分析。
通过计算和实验,表明该制动系统在满足实验要求上具有较好的制动性能。本文对无人驾驶小车制动系统的设计具有一定的借鉴意义。
关键词:制动系统,无人驾驶小车,建模
Abstract
The safety of automobile is the key point of automobile design and manufacture, and the braking performance of automobile is an important factor directly affecting the safety of automobile driving, and will also affect the performance of automobile power. The design of braking system is an indispensable link in the design of driverless car. The quality of braking system fundamentally determines the safety of driverless technology, which is closely related to the development of driverless technology.
In this paper, the design method and process of the braking system of driverless car are studied systematically. Firstly, the composition and classification of braking system are briefly introduced. Based on the theory of automobile braking system, the relative parameters and technical indexes are introduced. Secondly, through the analysis of various brake characteristics, determine the car brake system structure; According to the parameters of the whole vehicle, the car braking system is analyzed and calculated to determine the size design of key parts such as brake disc and brake clamp. The braking torque is tested and checked. At last, the related parts are modeled, and static analysis and thermal analysis of brake disc are carried out by using ANSYS Workbench
Through calculation and experiment, it is shown that the braking system has better braking performance to meet the requirements of experiment. This paper has certain reference significance for the design of the braking system of unmanned vehicle.
Key words: braking system,driverless vehicle,modeling
目 录
摘要 I
Abstract II
第1章 引言 1
1.1课题背景及意义 1
1.2研究现状 1
1.2.1 国外研究现状 1
1.2.2 国内研究现状 2
1.3 研究内容及研究路线 2
1.3.1研究内容 2
1.3.2研究路线 3
第2章 制动系统概述 4
2.1制动系统作用及组成 4
2.2 制动系统的分类 4
2.2.1 按制动器的结构形式分类 4
2.2.2 按制动回路类型分类 8
第3章 制动系统理论分析及参数确定 9
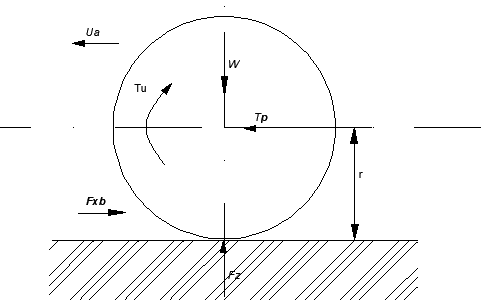
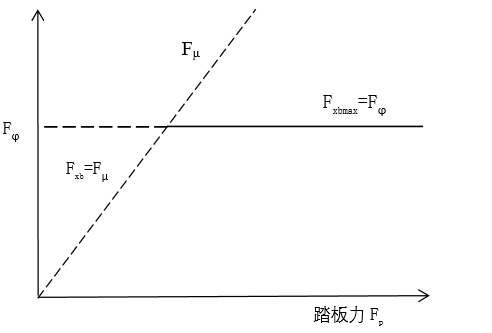
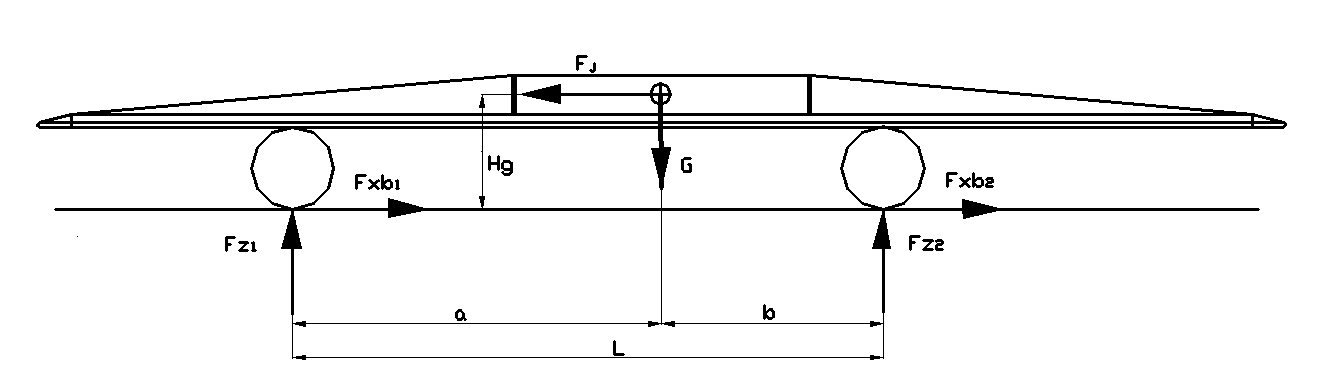
3.1 车轮受力分析 9
3.2 整车主要参数确定 10
3.2.1无人驾驶小车整车参数的确定 10
第4章 无人驾驶小车制动系统设计 11
4.1 小车制动系统主要参数计算 11
4.1.1制动系统设计要求 11
4.1.2制动力矩计算 11
4.2 主要零件设计及选型 12
4.2.1 制动器结构选择 12
4.2.2 制动盘设计 13
4.2.3 制动钳设计 14
4.3验证测试零件 14
4.4 整体方案设计 15
4.5 三维建模 16
4.6 仿真分析 18
4.6.1 制动盘强度分析 18
4.6.2 制动盘热分析 19
第5章 总结与展望 21
5.1 总结 21
5.2 不足与展望 21
参考文献 22
致谢 24
第1章 引言
1.1课题背景及意义
近年来,人们对互联网的关注越来越高,科技的不断进步也推动着互联网的发展。与此同时,传统汽车的快速发展让人们对汽车的安全性和智能化要求越来越高。汽车智能化结合互联网的大数据,让人们产生了无人驾驶汽车的想法。如果这项技术得以实现,不仅可以减低汽车的驾驶难度,而且将极大地提高行驶安全性。
无人驾驶汽车是可以通过计算机系统设置进而实现无人驾驶的新型智能化汽车[1]。无人驾驶汽车是集大成的产品,由监控设备、导航系统、数学计算、人工智能技术和雷达等分工协作实现的,控制终端是计算机系统。根据相关部门统计,车祸是最重要的事故,占所有死亡事故的一半以上,每年都有成千上万的民众死于车祸,给社会的发展和人们的生活造成了极大的影响。高智能化的无人驾驶汽车,无论是在其安全性还是可靠性方面,都具有巨大的发展潜力。因此,研究和发展无人驾驶汽车对减少事故数量和确保人们安全具有不可估量的重要意义。
对于无人驾驶技术的研究需要进行相关的测试和实验,而无人驾驶小车就是为了试验研究应运而生的。无人驾驶小车可以作为无人驾驶汽车的参照物,用来测试无人驾驶汽车在遇到各种突发事件时的表现,从而可以不断改进无人驾驶技术,使无人驾驶汽车早日用于人们的日常生活中。因此,提高无人驾驶小车的运行性能是至关重要的,作为无人驾驶小车中的关键部分,制动系统的设计当然也是必不可少的。
1.2研究现状
1.2.1 国外研究现状
发达国家早在上世纪五十年代就开始在无人驾驶汽车领域开展研究,并在某些方面取得了不小的进展。目前美国是世界上无人驾驶汽车研究最早,水平最高的国家。1950年,世界上第一台自主导航汽车在美国研制成功,达到了预期的效果。1987年,奔驰公司赞助慕尼黑国防大学实验室,独立设计了名为VaMoRs的智能车,它在当时创下了时速达97km的记录。1994年,欧洲研制的VaMP智能车在巴黎进行了实验,并实现了自主跟踪行驶[2]。1995年,美国卡耐基·梅隆大学研制出的无人驾驶汽车,实现了横穿美国东西部的无人驾驶试验[3],取得了了不起的进步。后来,最著名的是科技巨头Google也开始投入无人驾驶的研究。至今Google无人驾驶汽车在自动驾驶模式下已经累计行驶了大约300多万公里。2014 年,Google的新产品无人驾驶汽车与公众见面,让人惊讶的是,这辆无人驾驶汽车已经去掉了传统汽车的方向盘和刹车[4]。国外的无人驾驶技术起步早,积累了大量的实验数据和经验,已经在许多关键技术方面取得了不错的成功。
1.2.2 国内研究现状
在国内,无人驾驶汽车的领域目前仍处于初级阶段,相比于英美等国家仍存在着较大的差距。研究部门也不多,主要是部分高校和研究机构进行相关的研究。从上世纪80年代开始我国才开始在无人驾驶汽车领域开展研究。经过数十年的摸爬滚打,许多科学家的不断摸索和探究,我国第一辆无人驾驶汽车是在1992年由国防科技大学研制成功,在当时设计出来的产品相当落后,动力还是来自车载电池组,续航里程短,时速也特别小。2001年我国已经可以成功设计出时速可达76公里的无人车。2006年国防科技大学研发出红旗HQ3无人驾驶汽车[5]。到了2011年,国防科技大学自主研制的新一代红旗HQ3无人驾驶汽车,首次完成在高速公路上全程无人驾驶测试。近几年,随着无人驾驶汽车的火热程度不断暴涨,国内的许多研究机构也开始大量投入人力和物力到该领域,比较著名的就是百度研究院了。2013年百度研究院开始研发百度无人驾驶汽车,开始介入无人驾驶汽车的研究。2015年百度研发的无人驾驶汽车实现了在国内城市道路、环路、高速道路等混合复杂路况下全自动无人驾驶[6],取得了突破性进展。2015年长安汽车研发的无人驾驶汽车在国内亮相。2017年4月百度与博世达成有关于无人驾驶的战略合作 [7],等等。国内虽然起步比较晚,但是经过了许多科学家的不懈努力以及国家的大力支持,也在无人驾驶领域取得了不小的进步。
1.3 研究内容及研究路线
1.3.1研究内容
本设计是关于无人驾驶小车制动系统的,该无人驾驶小车主要是为了满足无人驾驶汽车的实验研究需要。通过介绍制动系统的主要作用、设计内容和方法,为无人驾驶小车的制动系统设计一套方案。主要研究内容如下:
(1)对制动系统的组成部分进行选型计算,根据无人驾驶小车的尺寸来选择不同零件的大小尺寸;
(2)对制动系统是否达到设计要求进行分析。以汽车理论和汽车动力学为理论基础确定制动系统的参数和性能目标,检验是否达到要求;
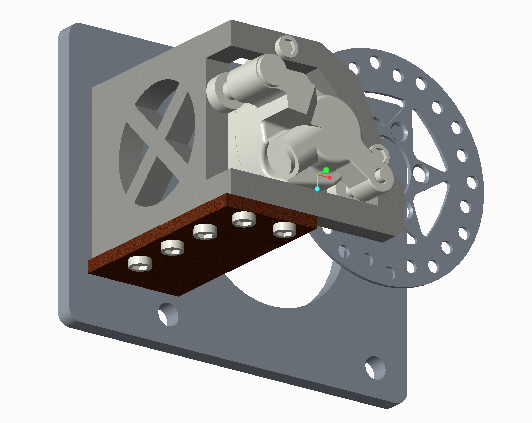
(3)运用Creo3.0实现对小车制动系统的建模,构建三维模型;
(4)对所设计制动系统进行仿真分析,确保设计的可行性。
1.3.2研究路线
论文以无人驾驶小车为主要研究对象,应用理论计算结合仿真分析方法进行制动系统的参数匹配,选型完成后进行计算校核,验证是否达到要求,本文技术路线如图1.1所示。
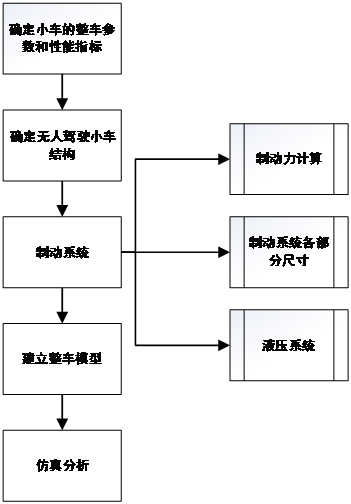
图1.1 本文技术路线
第2章 制动系统概述
2.1制动系统作用及组成
汽车制动系统的作用是使行驶中的汽车减速或泊车,使下坡行驶的汽车速度保持稳定,以及使已停驶的汽车在原地停止不动的机构。
制动系统由两部分组成:制动驱动机构和制动器。由于无人驾驶小车的特殊性,本文主要研究的制动驱动机构是由大扭矩舵机实现的。
制动系统由制动管路、制动器、制动主缸、制动轮缸等部件组成。传统的人力液压行车制动系统的工作过程是:制动动力从驾驶员踩下制动踏板开始,通过传动机构传到制动主缸,而踩下制动踏板输入的能量由机械能量在通过制动主缸后转换为液压能量,然后再经过制动管路输入到制动器的制动轮缸上,最后管路中的液压作用在活塞上,转变为使整个制动器开始起制动作用的机械能。
2.2 制动系统的分类
2.2.1 按制动器的结构形式分类
大部分汽车制动器是机械摩擦式,利用旋转部件和固定部件的相互贴合,进行摩擦,产生制动力以减慢或停止车辆。依据旋转部件的结构形式不一样,摩擦式制动器可分为两类:鼓式和盘式制动器,如图2.1[8]所示。
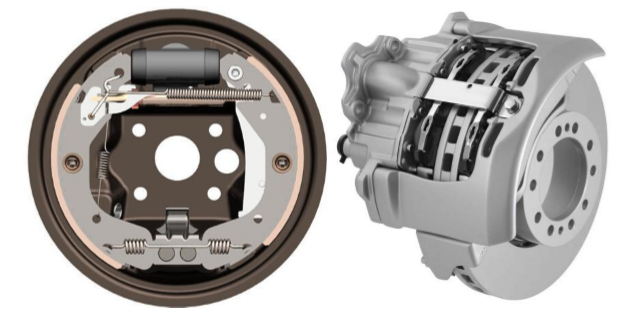
(a)鼓式制动器 (b) 盘式制动器
图2.1 制动器分类
1) 鼓式制动器
目前已经很少使用外束型的鼓式制动器,故只讨论制动鼓是内张型的制动器。内张型制动器的摩擦部分在汽车制动时,旋转部件在活塞的作用下内张并紧密贴合固定部件。
根据制动蹄分开时的转动方向与制动鼓相同与否可分为领蹄和从蹄,领蹄与制动鼓的旋转方向一致,从蹄则刚好相反[10]。在踩下制动踏板制动时,作用在领蹄上法向反作用力不断增大,使领蹄摩擦势能上升;相反,作用在从蹄上的法向反作用力持续减小,使从蹄摩擦势能下降。按蹄的类型分,有六种类型的鼓式制动器:
(1)领从蹄式制动器:如图2.2[8]。无论汽车是后退还是前进,均只有一只蹄是领蹄。当车辆反向移动时,领蹄与从蹄互换。从制动效能和稳定性看,领从蹄式制动器水平一般,但因汽车在刹车时,旋转部分制动鼓随车轮一起无论是正转还是反转,刹车效果均一样,且制动器结构设计不复杂,成本比较低,所以常用在多数商用车的前轮、后轮上,也有少数乘用车的后轮采用。
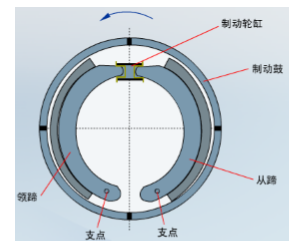
图2.2 领从蹄式制动器
(2)双领蹄式制动器(双向领蹄式制动器):当汽车前进时,具有两个领蹄,后退时,具有两个从蹄的制动器。如图 2.3[8],内部结构成中心对称,每个制动蹄均由一个制动轮缸推动运行。当车辆反向移动或者静止在上坡时,从蹄作用几乎没有用。因此,常被设计于乘用车前轮。
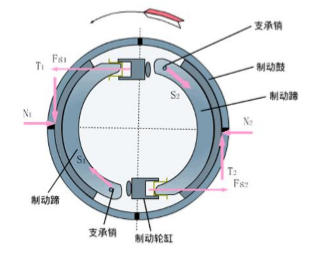
图2.3 双领蹄式制动器
(3)双向双领蹄式制动器:制动器始终具有两个领蹄,如图2.4[8] 所示。因这种制动器作用在领蹄上的法向反力不断增大,故制动性能始终不变。目前在普通载货汽车和部分轿车的前、后轮上,双向双领蹄制动器得到非常广泛的应用,但被用在后轮时,还需另外配置驻车制动装置。
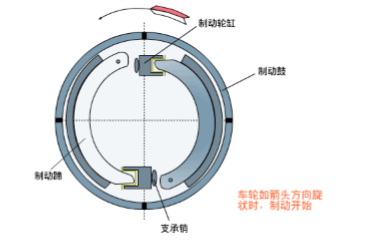
图2.4 双向双领蹄式制动器
(4)双从蹄式制动器:始终具有两个从蹄的制动器。如图 2.5[8],与双领蹄式制动器大致类似,两者的区别为固定部件与旋转部件的相对运动方向刚好相反。

图2.5 双从蹄式制动器
(5)单向自增力式制动器:如图2.6[8],所示两个制动蹄下端用顶杆连接,回位时通过拉紧弹簧复位,制动轮缸通过活塞连接第一蹄,制动时轮缸活塞推动第一蹄运动,再通过顶杆推动第二蹄运动,使第二蹄能绕支承销旋转,使两制动蹄能够靠近制动鼓。但在反转时,这种类型制动器的制动效果不好。
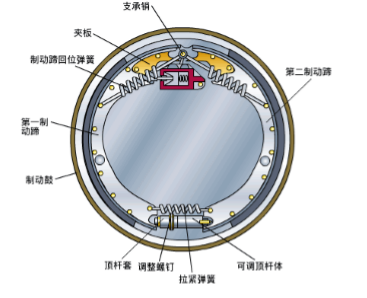
图2.6 单向自增力式制动器
(6)双向自增力式制动器:如图2.7[8]所示,是双领蹄结构的改进形式,两个制动蹄相连接,另一侧由双活塞推动压靠在制动鼓上,以达到制动效果。大型高速轿车上多安装此制动器,但因结构等原因,其制动效能的恒定性比较差,易使制动效率降底,大多制动器被替换为盘式。而因成本低,仍用于部分经济型车上。
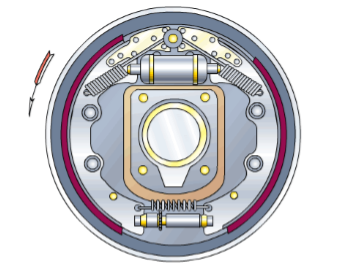
图2.7 双向自增力式制动器
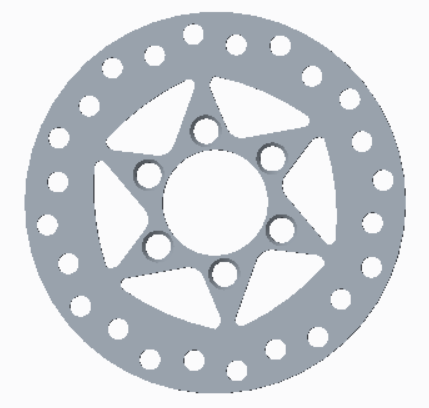
2)盘式制动器
盘式制动器目前广泛的运用于乘用车上,有钳盘式和全盘式两种类型,其中钳盘式制动器还可分为固定钳式和浮动钳式:
(1)定钳盘式制动器:制动钳保持固定不动,而制动盘要随着车轮旋转而旋转。这种制动器的优点在于易于保证制动卡钳刚度,在多回路控制中符合制动系统的要求,如图2.8[8]。
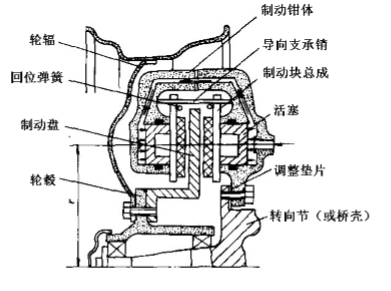
图2.8 定钳盘式制动器
(2)浮钳盘式制动器:制动的卡钳具有制动盘轴向的自由度。刹车片的一边有活塞,当活塞运动到制动盘后,使卡钳移动到另一边刹车片并与制动盘靠尽,如图2.9[8]。
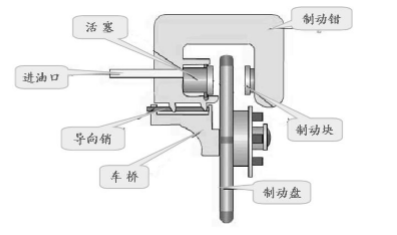
图 2.9 浮钳盘式制动器
2.2.2 按制动回路类型分类
制动时,驱动装置为保证行驶车辆的安全,制动系统应有至少两套独立的系统,即双回路系统,如果当一条回路出现故障发生失效时,其他完整的回路仍能可靠的工作[9]。汽车的双回路驱动机构系统一般分为下图五种方案。
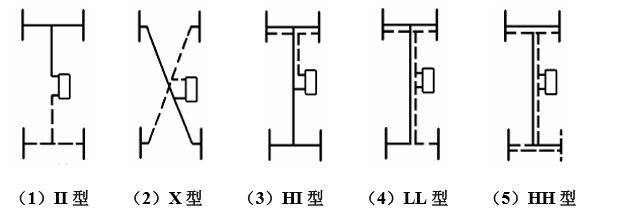
图2.10 五种类型制动回路
(1)II 型:一条回路控制前后轴的制动器,另一条回路仅控制后轴的制动器。也称一轴对一轴的分路形式。
(2)X 型:两个回路呈对角线分布,每个回路分别连接一个前制动器和相反方向的后制动器。也称为交叉型。
(3)HI 型:两条回路中一条用来连接四轮制动器,另一条只需要连接前轴制动器。也称一轴半对半轴分路形式。
(4)LL 型:两条回路连接基本一样,都分别连接两个前轮制动器和一个后轮制动器。也称半个轴与一轮对另半个轴与另一轮形式。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:

![D:\新建文件夹\1084970803\Image\C2C\8NP@L%R$N`A5%_2]Y60P0TG.png](http://www.biyelunwen.org/wp-content/uploads/2020/02/lw4599_202021810403064.png)