基于梯度投影法概率密度的机器人 人体模型反向运动学外文翻译资料
2022-12-07 16:20:36

英语原文共 4 页,剩余内容已隐藏,支付完成后下载完整资料
第34届国际医药与生物工程协会年会 , 2012年8月28日至9月1日,美国加利福尼亚州,圣迭戈
基于梯度投影法概率密度的机器人
人体模型反向运动学
Derek Lura, Matthew Wernke, Redwan Alqasemi, Stephanie Carey, Rajiv Dubey, Member, IEEE
摘要:本文介绍了基于梯度投影概率密度的零度空间的25级雅克比双边自由机器人人体模型。这种方法用来预测机器人人体模型的反向运动并且最大程度的提高预测反向运动形态和十个日常生活项目记录数据的相似性。密度函数是为工作空间的离散增量而创建的。在每个方向(x,y和z)的增量的数目是从1到20变化的。这个方法性能的评估是通过捕获运动状态下预测一个关节角度相对于另一个关节角度的均方根差异进而评估的。数据量包括创建的从1到10的10个受试者的概率密度函数,也包括为每个受试者所专门创建的组,并且将其从密度函数中排除。将使用梯度投影法的受试者所表现的效果囊括在内和并且将创建的组从密度函数的排除是为了测试这个方法的稳健性。梯度投影法的精度依工作空间增量的划分而变化。增加增量的额度会减小这种方法的均方根误差,所有被包括受试者在内的平均均方差误差范围在7.7°〜3.7°之间。然而增加增量的额度同时也会降低这种方法的稳健性。
- 引言
这项研究已作为南佛罗里达大学的“上身假肢的仿真工具开发”项目的一部分而被完成。这是为人体上半身运动的修复使用而分析并设计出假肢的努力发展历程上的一部分。以前的实验表明在用户为了克服假肢的活动范围限制而进行的胳膊运动可能会导致二次受伤。研究表明练习使用简易的上身假肢可以预测这些可能的补偿性运动。预测和模拟人体的运动已经在很多领域都进行了研究,包括3D图形,人体工程学,生物力学,其他。一个模型准确预测上半身的一般人类运动仍然是一个艰巨的任务。利用雅可比矩阵的逆向运动学控制冗余机械手的研究(3 - 6)和加权最小范式的解决方案被用于模拟人体上半身的运动(2、7、8)。基于概率密度梯度投影法精度的重建人类运动的运动分析数据已被分析。运动重建准确性中所使用到的最小的范式(LN)的解法也被作为一个参考而介绍。从运动分析数据中获取的关节中心分段定义和受试者具体的参数,近乎完美的允许重建人体运动这个项目使用它们。Karim Abdel-Malek, Zan Mi, [9,10]已经创建了一个上身模型,并优化了控制功能与姿势,同时把他们的结果与密歇根大学人体运动仿真学数据库中的运动数据进行了比较。然而,部分的模型和模型们中使用的某些数据库是不一样的,只有直观的比较两者之间的运动。还有些其他的研究也预测上肢运动,但目的是用在肩关节(肩)[11-14]。这些模型不能预测补偿运动,因为他们不包括上半身的终端关节。
该研发项目是由南佛罗里达大学进行的,并有可能被美国国家奖励和管理。军队医学研究与装备司令部(USAMRMC)和远程医疗与先进技术研究中心(TATRC),医学博士德特里克堡共同签下合同号:w81xwh - 10 - 1 - 0601。观点,意见和/或出版物中包含的内容应是作者的观点,并不一定能反映美国国防部的观点而且不应该被解释为官方,国防部/军部的政策或决定,除非指定的其他一些文档。没有官方的支持。
D. J. Lura, M. M. Wernke, S. L. Carey, R. Alqasemi, 和 R. V. Dubey,南佛罗里达大学的机械工程部门辅助中心,康复机器人技术中心(CARRT),美国佛罗里达州坦帕市33620(电子邮件:dlura@mail.usf.edu,电话:dlura@mail.usf.edu)。
978 - 1 - 4577 - 4577 - 1/12 / 6789copy;2012 美国电气和电子工程师协会26.00美元
二.动作捕捉
十个健康成年受试者参与了这项研究。受试者的人口统计资料被放在表一。运动数据的收集使用了八个摄像头的照相机Viconreg;(英国牛津)配备了21被动反射标记的运动分析系统被用双面胶安置在了主体的身上。十个健康的成年人受试者的关节活动度(RoM)数据在任务和日常生活活动(ADL)中被收集。在这项研究中,打开一扇门,饮一杯水,洗头发,提洗衣篮,用刀和叉吃饭被作为任务而研究。所有研究都是经南佛罗里达大学的机构审查委员会批准的,并在数据收集方面被批准优先获得资料。
表一. 人口统计
|
年龄 |
身高 |
体重 |
惯用手 |
|||
|
受试者 |
(岁) |
性别 |
(厘米) |
(kg) |
||
|
C01 |
21 |
男 |
173 |
62.5 |
右 |
|
|
C02 |
25 |
男 |
180 |
79.8 |
右 |
|
|
C03 |
20 |
男 |
181 |
83.5 |
左 |
|
|
C04 |
20 |
男 |
180 |
70.5 |
右 |
|
|
C05 |
24 |
男 |
186 |
100.5 |
右 |
|
|
C06 |
35 |
男 |
184 |
102.5 |
左 |
|
|
C07 |
38 |
女 |
160 |
62 |
右 |
|
|
C08 |
41 |
男 |
177 |
73.2 |
右 |
|
|
C09 |
58 |
男 |
174 |
90.5 |
右 |
|
|
C10 |
54 |
女 |
166 |
65 |
右 |
|
|
平均(plusmn;S.D.) |
34 (plusmn;14) |
- |
176 (plusmn;8) |
79 (plusmn;15) |
- |
|
为了表述受试者身体功能关节中心使用的Schouml;nauer描述方法,范围性的运动数据被收集。模型将上半身划分为骨盆,躯干,肩膀(肩胛骨和锁骨),上臂、前臂和手这几部分。每一部分是由一组跟踪标记进行跟踪。骨盆被用来定义基本框架,并且是通过在皮肤上靠近前,后,左,右髂骨盆的标记来定义的。躯干通过颈静脉槽口(CLAV)和第1胸椎(T1)的标记物进行跟踪。肩胛骨通过肩峰的(R&L SHIA,和R&B SHOP)的前部和后部标记物进行跟踪。上臂被肘(Ramp;LELB,Ramp;LELBM)的外侧和内侧髁跟踪。前臂被径向和凸起的手腕跟踪。最后,手被第三掌骨背侧(Ramp;LFIN)跟踪。在进行关节支撑点中心和关节角的计算之前,原始标记位置的数据在120赫兹的帧速率下被收集并使用加权移动平均滤波器来消除噪声。为确保各受试者的运动数据有冗余,每个任务完成三次。三种试验的数据收集后被用于测试和整合算法。RoM任务被用来精确计算功能关节的支撑点,并生成运动学的主体。任务要求受试者对从中立位置移动至他们舒适的运动范围这两个界限,然后返回到中立位置。关节支撑点的提取和分段定义的细节已经被示出。
三.运动学模型
很重要的一点是一个物理系统进行建模时,模型和系统要尽可能耦合。该模型是用RoM任务中所收集的数据构建的。每个关节支撑点加上各关节的自由位置,用于计算上身由Craig[18]描述的Denavit和Hartenberg符号参数。每个受试者具有一组特定的参数,这些参数包括段长度和关节支撑点位置。每组参数提取的RoM数据被用来创建机器人模型,定义段,并计算ADL任务的关节角。通过运动分析数据建立模型,模型的运动学几乎是和执行这些任务的受试者的运动一模一样的。正运动学模型在终端执行器位置的记录,这种方法的误差已被证明是非常小的,平均误差小于1毫米[17]。如果运动分析数据不提供,受试者手动测量也可以得到到受试者参数,但正运动学此时将略微不准确。
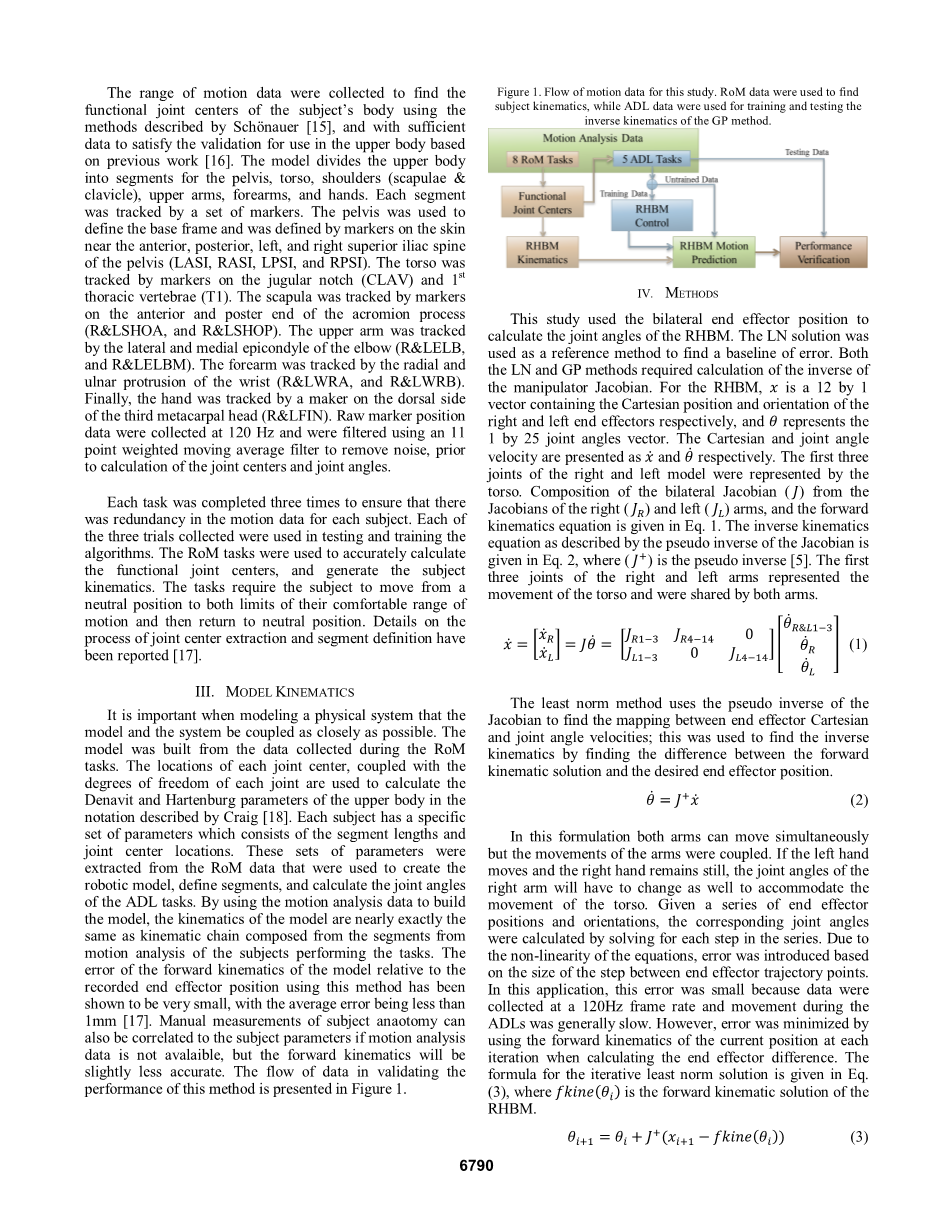
数据的这种验证方法流程图如图一所示。
如图1.本研究的运动数据流程图。RoM数据被用来发现受试者运动学规律,而ADL数据用于整合和测试在梯度投影法上的逆运动学。
四.方法
本研究利用双侧末端执行器的位置来计算机器人人体仿真模型的关节角度。最小范式法作为参考方法作为判定误差的基准。最小范式法和梯度投影法需要计算机械手的逆雅可比矩阵。在机器人人体运动仿真模型中,是一个12乘1的向量,其中包含了笛卡尔位置和左右两个终端效应器,表示1乘25的关节角向量。笛卡尔乘积和关节角速度分别用和表示。躯干用左右模型的前三个关节来表示。左右臂(JL)和(JR)雅克比矩阵的组合(J)和正向运动学的方程在方程1中给出。逆运动学的伪逆方程在方程2中给出,其中(J )是伪逆[5]。左右臂的前三个关节表示躯干的运动,并被双臂共同表示。
用雅克比伪逆最小范式的方法来找到终端执行器笛卡尔乘积和关节角速度的映射,并通过寻找正向运动解和终端执行器位置的期望的差异来寻找逆运动特征。
在这个公式中两只手臂可以同时移动,但臂的运动是联结的。如果左手运动而右手保持静止,右臂的关节角度必须改变,以迁就躯干的运动。鉴于一系列终端执行器的位置和方向,相应的关节角度是通过每一步长逐步计算而得。由于方程的非线性,误差被建立在终端执行器轨迹点的步长上。在这次运用中,误差很小,因为数据是在120赫兹的帧速率和在运动非常缓慢的条件下收集的。然而,误差在计算终端执行器差异时,在每次正向运动时迭代都进行了最小化处理。对于迭代最小范数解公式在方程3中给出,其中是机器人人体仿生模型的正向运动学的解。
这种方法被称为最小范数解,因为它为逆运动学范数和关节角速度的最小化提供了解决方案。梯度投影法用来优化雅克
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[31753],资料为PDF文档或Word文档,PDF文档可免费转换为Word



