基于高分辨率激光雷达数据提取城市建筑物的一种新方法外文翻译资料
2022-12-27 15:48:58

英语原文共 7 页,剩余内容已隐藏,支付完成后下载完整资料
基于高分辨率激光雷达数据提取城市建筑物的一种新方法
F. Rottensteiner*, Ch. Briese
Institute of Photogrammetry and Remote Sensing, Vienna University of Technology, Guszlig;hausstraszlig;e 27-29, A-1040 Vienna
摘要:本文提出了一种由LIDAR传感器直接获得的点云数据,自动生成3D建模模型的新方法。通过使用偏斜误差分布函数的Robust插值的分级应用,将地形上的LIDAR点数据与建筑物和其他对象类上的点分离,并且可以计算出该区域的数字地形模型(DTM)。建筑物上的点与分类为偏离地形点的其他点的分离,通过分析通过原始LIDAR点的数字表面模型和数字地形模型的高度差异来实现的。因此,通过导出建筑掩模,并且应用基于曲率的分割技术,从而在研究区中自下而上地创建多面体建筑模型。位于维也纳市的测试场地将提供该研究的中期成果。
关键词:建筑物提取;自动化;三维建筑模型;激光扫描
1 绪论
1.1研究背景与目的
3D城市模型的数据采集自动化是研究的重要课题,目的是降低在适当的细节层面提供这些数据的成本。除了依靠航空图像的摄影测量技术之外,由LIDAR传感器提供的点云生成3D建筑模型也越来越重要。传感器技术的发展已经引发了这种发展,这使得可能使用机载激光扫描仪获取非常密集的点云。使用点密度高达每平方米1点的LIDAR数据,不仅可以检测建筑物及其近似轮廓,还可以提取平面屋顶面,从而创建与屋顶结构正确相似的模型。
建筑物提取分两步解决(Brenner,2000)。首先,必须在数据中检测到建筑物,并且必须确定大致的建筑物轮廓。第二,在这样的感兴趣的地区,建筑物必须是几何重建的,导致建筑物的3D多面体模型。本文的目的是提出一种新方法,用于在高分辨率激光雷达数据的高密度建立区域中自动创建多面体建筑模型,而不使用地面方法。本文的方法在构建检测算法方面是独一无二的,因为它是基于robust插值的。在检测到的建筑区域中,提取了平面屋顶贴片,其边界多边形及其邻域关系。本文中提出的实例使用由TopoSys捕获的维也纳市的测试地点的LIDAR数据计算。原点云的分辨率为0.1m(飞行中)、1米(交叉飞行)。使用从该点云得到的0.5times;0.5m2的网格用于建筑物提取。测试数据在维也纳市试点项目过程中获得,以评估和比较各种技术的3D城市模型。中间结果显示了本文提出的方法的潜力很大。
1.2相关工作
在该次研究之前,我们已经几次尝试检测LIDAR数据中的建筑物。通过根据是否属于地形,建筑物或其他对象类别,对LIDAR点进行分类来解决任务。 形态开放滤波器或等级滤波器通常用于确定从数字表面模型(DSM)中减去的数字地形模型(DTM)。通过对由此产生的归一化的DSM应用高度阈值,获得初始的建模掩码(Weidner,1997; Ameri,2000)。为了去除植被区域,必须改进初始分类。Brunn和Weidner通过在贝叶斯网络中组合各种形状线索的框架来实现。本文从LIDAR点建立检测的算法是基于(Kraus和Pfeifer,1998)中出现的Robust插值的DTM生成方法。
先前检测到的感兴趣区域的建筑物的几何重建已经解决了两种。首先,如果发现足够的证据,基元特征参数可以被实例化为适合数据。第二,可以在从LIDAR点创建的DSM中检测平面补丁,并且可以通过对这些平面补丁进行分组来导出多面体建筑模型。由于基元特征参数通常具有矩形占位面积,因此如果提供了建筑物轮廓的精确位置的2D平面图,则特别使用它们。2D图中描绘建筑物的多边形被分割成矩形区域。在每个矩形中,使用DSM确定参数模型的参数,并且实现最佳拟合的模型(Brenner,2000; Vosselman和Dijkman,2001)。由LIDAR数据生成的多面体建筑模型数据,只有在点密度足够高的情况下才有意义,以便足够数量的数据点至少位于屋顶最相关的平面中。由于建筑轮廓难以精确定位,因此,平面图也经常用于此目的。由于这些平面的梯度方向通常垂直于地面平面中的相邻多边形段,所以地平面图还减少了相邻平面块的参数估计的搜索空间(Haala等,1998; Brenner,2000; Vosselman and Dijkman ,2001)。初始平面可以通过DSM的分割找到。Brenner(2000)给出了几种用于DSM分割的方法,例如表面曲率的分析,即表面法向矢量的变化;基于平面图多边形部分的方向的分割。
一旦找到初始的平面贴片,相邻的贴片就被分组(Baillard等,1999),并且会找到描绘平面贴片边界的多边形。然后在建筑顶点找到一致的交点(Moons等,1998)。最后,为了获得一致的建筑模型,必须组合3D边框多边形。在建筑物轮廓,垂直的墙壁,最后,地面必须添加到模型。可以通过首先搜索数据中最相关的结构并使用精确的方法来对不被初始模型充分解释的区域中的建筑进行建模(Vosselman和Dijkman,2001)。Weidner(1997)通过应用最小描述长度原则来决定正则化问题来解决精确确定构建轮廓的问题。
2建筑提取流程
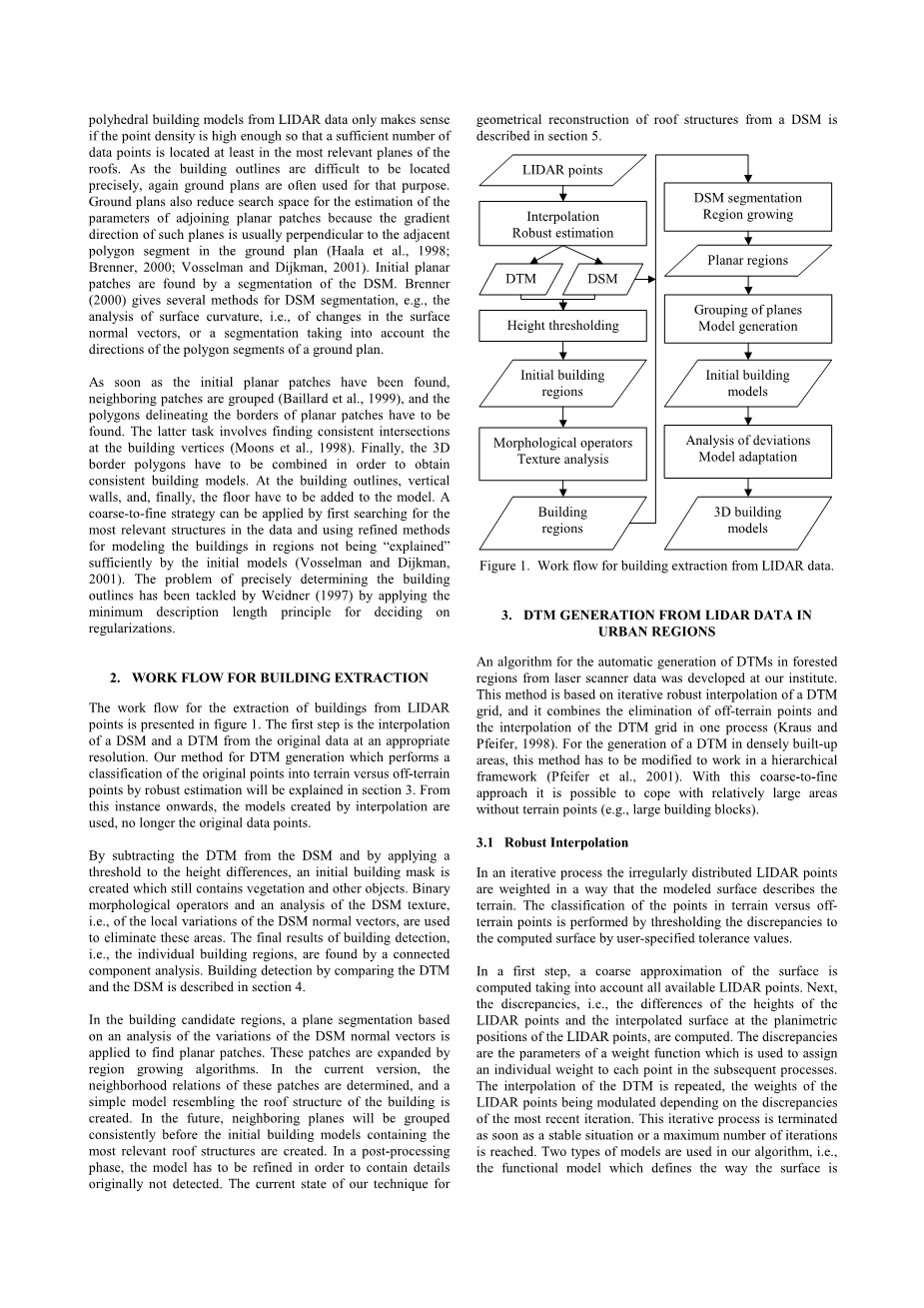
从LIDAR数据提取建筑物的工作流程如图1所示。第一步是以适当的分辨率从原始数据中插入DSM和DTM。第3节将介绍我们的DTM生成方法,通过Robust插值估计,将原始点分解为地形与地形之间的区别。从该实例开始,使用由插值创建的模型,而不再是原始数据点。
图1 由LIDAR数据建立建筑物提取工程的工作流程图
通过从DSM中减去DTM并通过对高度差应用阈值,创建仍然包含植被和其他对象的初始建筑掩模。使用二元形态算子和DSM纹理的分析,即DSM法向量的局部变化的分析来消除这些区域。 建筑物检测的最终结果,即个体建筑区域,通过连接分量分析来发现。 第4节描述了通过比较DTM和DSM的建筑物检测。
在建筑候选区域中,应用基于对DSM法向量的变化的分析的平面分割来找到平面块。 这些补丁由区域增长算法扩展。在当前版本的模型中,确定了这些补丁的邻域关系,并创建了类似屋顶结构的简单模型。在将来,相邻的区块将在包含最相关的屋顶结构的初始建筑模型被创建之前被一致地分组。在后期处理阶段,必须对模型进行细化以便包含原来没有检测到的细节。目前我们对DSM屋顶结构几何重建技术的现状在第5节中描述。
3从城市地区的雷达数据中生成DTM
我们开发了一种用于LiDAR数据自动生成森林地区的DTM的算法。该方法基于DTM网格的迭代Robust插值,并结合了在插值过程中消除离地点和DTM网格插值的功能(Kraus和Pfeifer,1998)。为了在密集区域中生成DTM,该方法必须被修改为在层级框架中工作(Pfeifer等人,2001)。利用这种由粗略到精细的方式,可以应对相对较大的没有地形点的区域。
3.1 Robust插值
在迭代过程中,不规则分布的LIDAR点以建模表面描述地形的方式加权。通过用用户指定的公差值,对计算出的表面的差异进行阈值处理,来实现地形与地形之间的点的分类。
第一步,考虑到所有可用的LIDAR点来计算表面的粗略近似。然后计算差异,即LIDAR点的平面位置处的LIDAR点和内插表面的高度的差异。差异是权重函数的参数,其用于为后续过程中的每个点分配单独的权重。重复DTM内插,根据最近迭代的差异来调整激光雷达点的权重。 一旦达到稳定的情况或最大次数就会终止该迭代过程。在我们的算法中使用两种类型的模型,即定义表面计算方式的功能模型,以及负责加权的随机模型。
功能模型:线性预测用于对表面进行建模。使用该模型,可以考虑随机测量误差来计算平滑曲面(Kraus,2000)。
随机模型:为了生成DTM,必须将高权重分配给平均表面下方或平面上的地形点,并且必须将低权重分配给高于平均曲面的非地形点。由激光扫描仪数据生成DTM的偏差r参数化的典型权重函数p(r)如图2所示。我们使用的权重函数不对称,并被移位一个值g。由于其半角值h和斜率大于其中心点的偏差(即对于估计表面以上的偏离地形点)而言,它具有明显的下降,而地形点也不会下降。从插值过程中排除点是由用户指定的差异大小的容差导出的阈值t触发的。关于这个算法的综合描述,参见(Kraus和Pfeifer,1998)。
图2 LiDAR数据生成DTM的权函数原理图
3.2 分层Robust插值
迭代Robust插值的方法依赖于地形和偏离地形的“良好混合”。因此,该算法在没有地形点的大面积上不起作用,因为它们可能存在于密集地区。为了在密集区域提供这种“良好的混合”,必须使用数据金字塔(与图像处理中的图像金字塔相当),以分级方式应用鲁棒插值。 分级鲁棒插值进行如下:
1.创建数据金字塔。 这可以通过选择例如常规网格网格中的最低点来实现;
2.执行Robust插值生成DTM;
3.将DTM与下一个较高分辨率的数据进行比较,并接受一定容差范围内的点数。
步骤2和3需在数据金字塔的每个分辨率级别上均重复进行一次。在较低的分辨率水平的DTM插值的结果被用于在下一个更高的分辨率的表面的计算,因为只有通过阈值的步骤3的点被认为是属于该级别的。
在(Briese,2001)中,该策略使用三个分辨率的数据金字塔级别(5m,2m和0.5m)用于生成位于维也纳市(2.5 km2)的测试地点的高质量DTM米。该DTM生成过程的几个中间结果在图3a-d的透视图中呈现。
a b
c d
图3 0.5m分辨率DSM(a);5m分辨率DSM(b);5m分辨率DTM(c);接受全部原始点(用户定义的公差带内的点)的5m分辨率DSM(d)
图4显示了最终DTM的细节的透视图。(Pfeifer等,2001)中可以找到关于分级Robust插值,软件包SCOP中的实现以及一些其他例子的结果的更多细节。
图4 最终DTM图像(0.5m分辨率; 为更好的可读性,此处为1.0m分辨率显示)
4建筑物检测
如第3节所述,通过插值得到两个数字高程模型:从具有高度平滑度的分类为“地形点”的点计算出DTM,而不需要平滑地从所有点计算DSM(图5a)。通过阈值DSM和DTM之间的高度差(例如,通过Delta;hmin= 3.5m)来创建初始建筑掩模。这种初始建筑面罩仍然包含被植被覆盖的区域,一些单独的建筑块没有正确分离(图5b)。
图5 维也纳市的测试地点建筑检测。原始分辨率:1.0m;
(a)帝斯曼 网格宽度:0.5 x 0.5 m2;范围:410 x 435 m2;(b)初始建筑面罩(高度阈值Delta;hmin= 3.5m); (c)评估地形粗糙度之前的初始建筑标签图像;(d)纹理分类结果。集成内核:9 x 9像素。白色:均匀;灰色:线性;黑色:点状;(e)最终建筑标签图像;已检测到14个建筑区域;(f)从图5e中建筑区域边界多边形创建的棱镜模型的VRML可视化图
使用小正方形结构元件(例如,5times;5)的形态开启过滤器被施加到初始建筑掩模,以便擦除诸如栅栏之类的长时间的物体,并且分离由仅由像素细线构成的区域。应用所得图像的连通分量分析以获得初始建筑区域。在这种情况下,将小于最小面积(例如40 m2)的区域和DSM边界的区域梳理(图5c)。
图5c中的一些剩余区域仍然对应于一些树木。可以通过评估通过对DSM的二阶导数进行分析得出的“地形粗糙度”标准来消除这些区域。在(Fuchs,1998)中,描述了一种用于多态特征提取的方法,其通过对数字图像的一阶导数的分析来将纹理分类为均匀的,线性的或点状的。该方法使用大集成内核(例如9times;9)应用于DSM的一阶导数。对于每个初始建筑区域,计数“点状”像素的数量。包含超过50%像素的区域被分类为“点状”(因此,像素处于大面积,但是表面法线的各向异性变化)很可能包含植被而不是建筑物,并被消除。图5d显示了纹理分类的结果。注意,在黑色和植被区域(如位于测试地点左边缘的Belvedere花园)中显示的“点状”像素的簇的明显共同发生。
地形粗糙度标准对分离的植被区域进行分类非常有效,但找不到与建筑物相连的植被区域。在分析的最后阶段,我们试图消除这些地区。通过使用方形结构元件的形态开放,仅由小桥连接的区域被分离。所得到的二值图像通过连通分量分析进行分析,其导致更多数量的区域,并且再次评估地形粗糙度标准。现在分类为含有植被的区域的像素在初始建筑标签图像中被清除。因此,在最初连接到建筑物的植被区域中,只有边界像素保持分类为“建筑像素”。同样,形态开放有助于消除这些边界像素。最后所得到的建筑标签图像在一些后院中仅包含一小部分错误分类的像素(图5e)。
在非常粗略的细节层面上,可以通过使用从DSM计算的平均建筑高度从建筑
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[28073],资料为PDF文档或Word文档,PDF文档可免费转换为Word



