指动导航小车的设计与实现毕业论文
2020-06-19 21:45:51
摘 要
本文提出了一种基于ARM处理器通过手指转动实现智能小车的控制的设计方法。
针对市场上,未知领域的探索中,传统的控制方式无法实现越来越多变的研究场景,设计了一种通过感知手指的状态从而控制小车的行驶路线的控制思路,通过ARM的嵌入式处理器产生PWM输出信号,根据控制指令,调节PWM的占空比,来调节两电机之间的转速差,达到控制方向的功能。凭借姿态传感器,感知人手的转向信息,并经过蓝牙,通过嵌入式处理器上的串口,获得控制信息进而控制输出电压,从而根据人手指的状态精确控制小车的走向。
关键词:ARM处理器 智能小车 PWM占空比 蓝牙 手指
Control and Realization of Intelligent Car By Finger
Abstract
This paper presents a design method based on ARM processor to realize the control of intelligent car by means of finger rotation.We present the design that we make directly connection between human finger and the station of intelligent car, and through the rotation of the finger to control the turning angle of the car, and through the fingers of the up and down to control the speed of the car.The use of human brains on the car fuzzy control enhance the ability to adapt to the environment. Through the ARM's embedded processor to generate PWM output signal control the output voltage by adjusting its duty cycle, and control the DC motor speed; through the speed difference between the two motors to achieve the steering function. Using the attitude sensor, sensing the steering information, and the embedded processor on the serial port to access to control information and then control the output voltage.
Key Words: ARM PWM Intelligent car Human finger
目 录
摘 要 I
Abstract II
第一章 绪论 1
1.1 自动控制智能小车概述 1
1.2 国外智能化机器人的发展历史 2
1.3 国内智能化机器发展历程 3
1.4 本论文的实现步骤以及章节分配 4
1.4.1 本论文的实现步骤 4
第二章 指动小车系统的全局设计方案 6
2.1控制系统的全局设计 6
2.1.1指动小车控制系统的全局设计思路 6
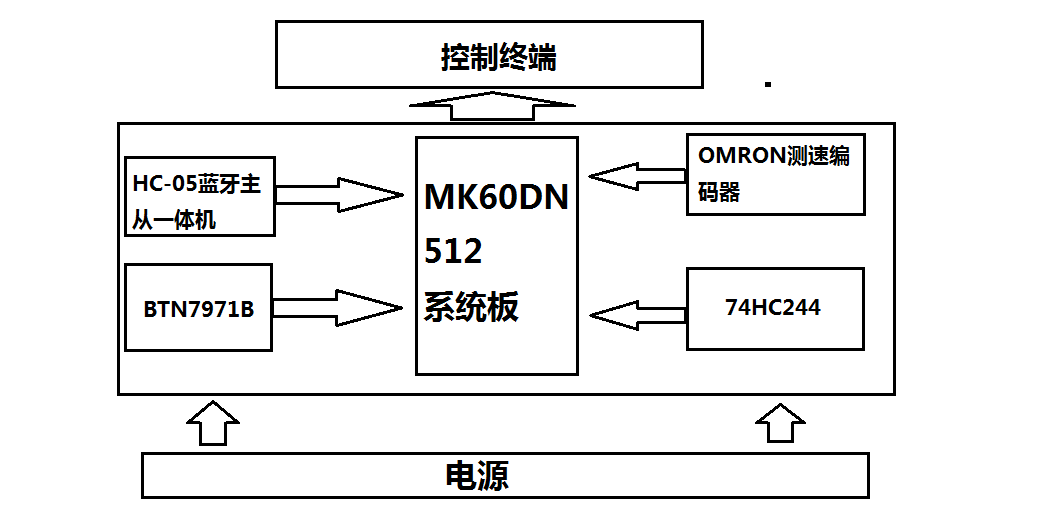
2.1.2 指动智能小车的总体设计框图 7
2.1.3 设计的可行性分析 8
2.2 系统集成开发环境 8
2.2.1 硬件开发环境 8
2.2.2 软件开发环境 9
2.2.3 程序调试环境 10
2.3 蓝牙技术介绍 10
2.3.1 蓝牙协议体系结构 10
2.3.2 蓝牙技术的基本工作原理 11
2.3.3 蓝牙通讯技术具备的技术特性 11
2.4 本章小结 12
第三章 指动控制智能小车的硬件设计 13
3.1 嵌入式系统硬件设计 13
3.1.1嵌入式系统硬件模块综述 13
3.1.2 系统硬件的全局规划 13
3.2 系统硬件模块选型 14
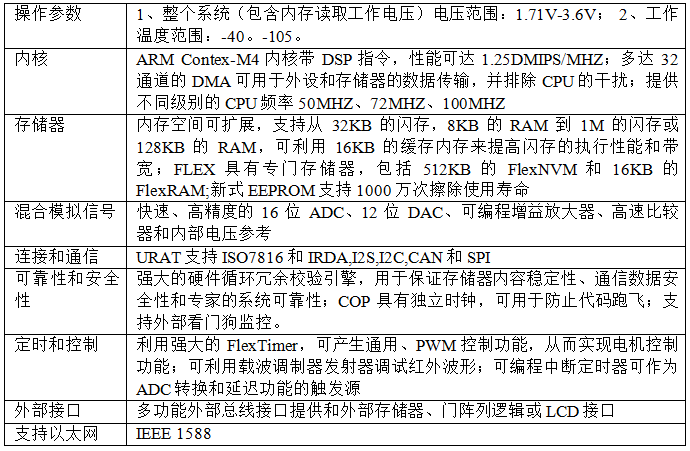
3.2.1 微处理器模块选型 14
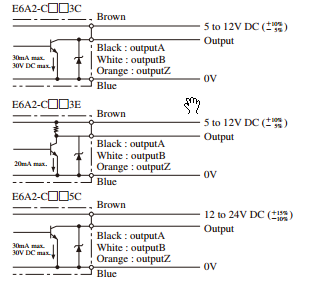
3.2.2 测速编码器的选型 15
3.2.3 电机驱动模块选型 17
3.2.4 蓝牙模块的选型 20
3.2.5 姿态传感器选型 21
3.2.6 电源电路模块设计 22
3.3 本章小结 23
第四章 指动控制小车的软件设计 24
4.1 操作系统的选取 24
4.2 系统驱动程序设计 25
4.2.1 姿态传感器的驱动程序设计 25
4.2.2 电机驱动程序的研发原理 26
4.2.3 测速器驱动程序设计 28
4.2.4 蓝牙模块驱动程序设计 29
4.3 本章小结 31
第五章 系统测试 32
5.1 硬件测试 32
5.2软件测试 32
5.3 总体调试 33
第六章 总结与展望 37
6.1总结 37
6.2 展望 37
参考文献 39
第一章 绪论
1.1 自动控制智能小车概述
随着科学技术的不断深入研究,人类越来越重视智能控制和电子技术领域的研究创新,自动控制方法的适用领域逐步扩大,逐步实现高度智能化。目前,智能技术不断突破,智能机器受到各行各业重视,科研机构也加大了研究力度,它们不仅在农业、工业、军事、服务等行业得到广泛利用,更是在辐射、救援勘测等特殊环境中提供极大的技术支持。智能机器人能代替人类进入危险环境进行探测,救援等活动,而人就可以在安全的区域进行远程操控[1]。
机器人技术的逐渐成熟,逐渐加快了机器人的平民化进程。日本松下公司Accentur实验室研究的家用辅助型机器人可以协助主人记忆不同的脸孔,是机器人平民化进程中的里程碑。
但机器人在工业中也越来越多地使用,如装配机器人等[8]。在机器人众多的分类中,移动型机器人是最具有发展前景的机器人类型,它凭借着它的灵活性强,机动性较高的特点,在进行危险、恶劣环境的探索活动中具有非常大的发展前景 [2]。
轮式机器人,也就是车型机器人,是移动机器人的种类中最典型的代表,和其它类型的机器人相比,它凭借他的稳定性强,承载力大,移动速度平稳的特点和易于控制的特点成为最具有优越性的可控小车的设计结构。因此,轮式机器人拥有宽广的应用前途,而且对促进智能化生产具有十分重大的意义 [2]。
本课题研究的基于指动导航控制的智能小车设计,智能小车属于轮式机器人的一种,所以本次设计的小车可以成为玩具的发展方向,以增强中国玩具市场技术水平,同时产生商业价值。传统智能小车的控制方式存在各种各样的问题,如遥控手柄方式能实现的功能较简单,缺乏完善的参数设置与功能选择等功能;而键盘方式则存在携带不便、 操控不直观等缺点[5,6]。因此,本课题采用指动导航实现小车的遥控操作,有望有效克服了上述现有操作方式存在的缺点,具有操作灵活、携带方便、易于功能扩展等特点。
相关图片展示: