基于TOF测量技术的短距激光雷达设计毕业论文
2020-02-19 07:51:52
摘 要
激光雷达极高的距离分辨率和角分辨率,速度分辨率高、测速范围广、能获得目标的多种行为特征、抗干扰能力强、比微波雷达的体积和重量小等特点,从而能精确测量目标位置、运动状态和形状,探测、识别、分辨和跟踪目标。目前,激光测距已深入应用到各个方面,在军事、气象、交通、卫星、航海等领域有一定应用。
论文中介绍了激光测距的原理以及组成车载测距激光雷达系统的各个模块。车载测距激光雷达系统主要由激光发射电路,激光接收电路,时间距离转换电路组成。测距采用TOF测距方法。
本文主要对激光发射电路和激光接收电路进行设计,并展示各个模块在实际测量中的结果,最后对测量数据进行处理,得到实际距离与测量数据间的线性关系。本次毕业设计实现了1m~20m间的准确测量。
关键词:光电检测;激光测距;TDC-GP21;半导体激光器
Abstract
Lidar has the characteristics of high range resolution and angular resolution, high speed resolution, wide range of velocity measurement, multiple behavior characteristics of target, strong anti-jamming ability, smaller volume and weight than microwave radar, so it can accurately measure the position, motion state and shape of target, detect, recognize, distinguish and track target. At present, laser ranging has been applied in many fields, such as military, meteorology, transportation, satellite, navigation and so on.
In this paper, the principle of laser ranging and the modules of the vehicle ranging lidar system are introduced. Vehicle ranging lidar system is mainly composed of laser transmitting circuit, laser receiving circuit and time-distance conversion circuit. TOF ranging method is used in ranging.
This paper mainly designs the laser transmitting circuit and the laser receiving circuit, and shows the results of each module in the actual measurement. Finally, the measured data are processed to obtain the linear relationship between the actual distance and the measured data. This graduation project realizes the accurate measurement between 1m and 20m.
Key words:Photoelectric Detection,Laser Ranging,TDC-GP21,Semiconductor Laser
目 录
第1章 绪论 1
1.1课题背景 1
1.2国内外发展现状 1
1.3课题研究意义 2
1.4本文研究的内容 2
1.5本章小结 3
第2章 激光雷达测距原理 4
2.1测距原理 4
2.2测距方法 4
2.2.1脉冲测距法 4
2.2.2相位测距法 5
2.3发射信号的分析 6
2.4接收信号的分析 6
2.5误差分析 7
2.5.1TDC-GP21的精度 7
2.5.2器件延迟误差 7
2.5.3脉冲波形引起的误差 7
2.6激光接收噪声分析 8
2.7本章小结 8
第3章 激光雷达电路设计 9
3.1激光雷达发射电路设计 9
3.1.1半导体激光器的选择 9
3.1.2 SPL PL90-3激光器驱动电路 11
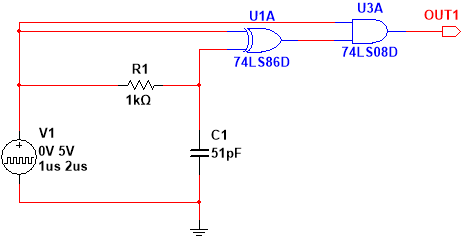
3.1.2.1窄脉冲产生电路 12
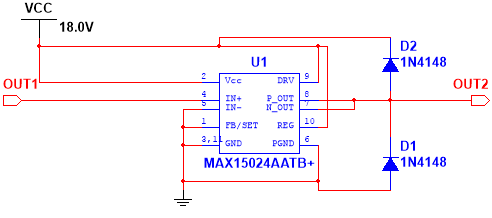
3.1.2.2 MOSFET驱动电路 13
3.2激光雷达接收电路设计 14
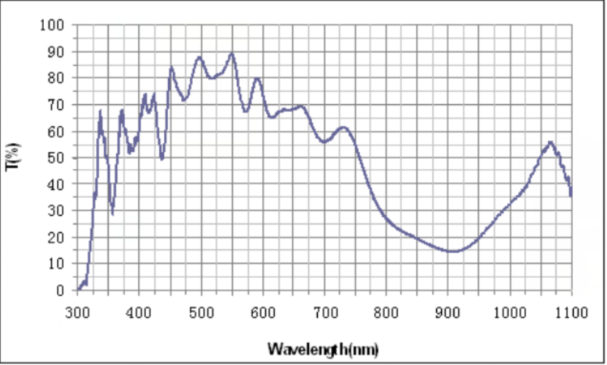
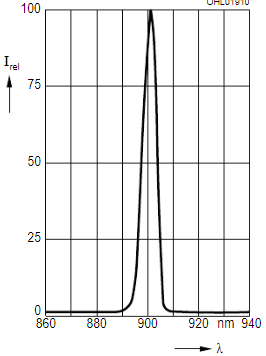
3.2.1 滤光片的选择 14
3.2.1 PIN型光电二极管型号选择 15
3.2.2 接收功率的大致计算 18
3.2.3 跨阻放大器的选择和电路设计 19
3.2.4时刻鉴别电路的分析 20
3.2.4.1恒比定时法 21
3.2.4.2阈值比较法的调整 22
3.2.4 主放大电路设计 22
3.2.5 AD转换电路设计 23
3.3 时间测量电路 23
3.3.1 芯片选择及介绍 23
3.3.3 TDC-GP21的设置 25
3.3.4 TDC-GP21的外围电路 25
第4章 实际电路的信号测量结果 27
4.1 激光发射电路的信号测量结果 28
4.1.1 异或门的输入输出信号 28
4.1.2 与门的输入输出信号 28
4.1.3 驱动激光二极管的充放电信号 29
4.2 激光接收电路的信号测量结果 30
4.2.1 光电二极管输出信号 30
第5章 测量结果处理 31
第6章 总结 33
6.1系统缺点及问题 33
6.2未来改进方向 33
参考文献 34
致谢 36
第1章 绪论
1.1课题背景
当今世界,信息化程度越来越高,获得信息的能力越来越重要。21世纪中,激光技术是继原子能、计算机、半导体之后,人类又一重大发明。激光测距作为一种高精度测距方式,自诞生以来便获得飞速发展,激光测距技术日益成熟,其作用越来越为人们所重视。电力、水利、通讯、环境、建筑、地质、警务、消防、爆破、航海、铁路、军事、农业、林业、房地产、休闲、户外运动等方面都有激光测距技术的应用。尽管激光测距有着受天气和大气影响大以及波束极窄而难以在空间搜索目标的缺点。但瑕不掩瑜,在大部分情况下,都可以充分利用其优点来完成相应的任务[22]。
本次毕业设计主要研究激光测距在交通方面的应用,期望设计一款车载激光雷达,能实时将路况传送给处理单元,做出相应处理保证乘车安全。车载激光雷达在某些应用场景对距离要求并不高,如在城内道路行驶时,并不需要测量100m以外的物体,因此设计的激光雷达测距范围为1m~20m,精度为0.1m。目前大部分车载测距设备都是高精度摄像、激光雷达和超声波雷达[14]。由于超声波传播速度慢的缺点,不能及时反映远距离路况,其主要应用于短距离测距,例如倒车。而激光雷达由于精度高,速度快,抗干扰能力强[22],在车载雷达中使用越来越多。
车载激光雷达有待改进,其体积要越做越小,质量越做越轻以便于安装。其精度要越来越高,增加检测的准确性。其抗干扰能力要越做越强,增加测量结果的可靠性。
1.2国内外发展现状
在无人驾驶方面,激光雷达技术不断发展,由单线测量逐步向多线测量发展,由二维测量逐渐向三维测量发展,精度不断增加,测量速度越来越快,可靠性、稳定性越来越高。早在上世纪50年代,美国就开始对无人驾驶进行研究,并在接下来的时间里迅速发展,领先世界。2000年时,白天无人驾驶已经能够在植被地形上行驶速度达到32km/h,而晚上可以以16km/h的速度行驶。即使是环境较恶劣的湿地,行驶速度也能达到16km/h,环境良好的情况下更是能达到64km/h。2010年时谷歌公司在车上装载64线激光雷达、相机和毫米波雷达作为检测设备,开始在城市道路上进行测试,并对信号灯识别以及障碍物检测。从开始测试到2013年5月,该车的累计行程已经超过了20万公里[10,11,12]。继美国之后,欧洲各国也将无人驾驶与车载激光雷达投入研究,有代表性的有RoboJeep和VaMoRs、VaMp和AGRO,分别由荷兰的阿姆斯特丹大学,意大利的帕尔马大学所研制。德国大众公司研制了一款无人驾驶车,安装Velodyne公司的64线激光雷达,在汽车前端安装激光扫描仪,可以获得180m范围内的交通情况[21]。此外,由英国研发一款集成了VQ-250型激光扫描仪的车载激光雷达系统—StreetMapper360,该系统配合两台AVTPikeF421C型高速彩色数码成像系统,装于车顶,实现对前方障碍的测量和路面信息的获取。这款车载激光雷达的测量精度为5毫米,测量范围约为300米,单扫描仪每秒能测30万个点,测量频率近300KHZ,综合测量精度可达厘米量级。在国内,第一台无人驾驶车于1992年由国防科技大学研制。南京理工大学、上海交通大学和湖南大学紧跟国防科技大学脚步,开始无人驾驶技术的研究。2009年国内举办了首届“中国智能车未来挑战赛”,湖南大学、上海交通大学按照规定路线进行测试并完成了特色表演等额外任务,分获1、2名。近年国内车载激光雷达也完成了突破,各个公司新研制的车载激光雷达涌现。北京北科天绘发布了一款俯仰视场为30°,测量距离为1-100米的激光雷达—R-Fans16线激光雷达,其扫描帧频≥15Hz,激光点频gt;300kHz。RS-LiDAR由深圳速腾聚创研制,也是一款16线的激光雷达,该激光雷达量程可达100米,精度2厘米,水平测量范围为360°,垂直测量范围为30°,实时出点数32万点每秒,采用混合固态的形态。距离测量装置是无人驾驶车辆的核心。当前,激光雷达测距技术是一项有远大前景的新兴技术。未来激光雷达要向更快,更准,更可靠方向发展。
1.3课题研究意义
目前,一切发展都趋向于信息化,自动化,便利化。人们通过电路设计以及编程设计好自动化装置。外界信息传达至处理单元,处理单元操纵各种设备从而减少人的工作量。机器服务人类成为大势所趋。在这种背景下,无人驾驶也成为一种可供选择的方向。在军事中,无人驾驶可以减少人员伤亡,而在交通中,无人驾驶可以有效防止驾驶人员由于疲劳或其他因素造成的事故的发生。智能交通也成为未来发展的一大课题。设计一款车载激光雷达是无人驾驶的核心,从外界快速获得精确信息传送给处理单元做出相应处理对于无人驾驶十分重要。
1.4本文研究的内容
本次毕业设计的目的是设计一个短距车载激光雷达,能准确快速的将路面的信息经相应的信号放大,转换后传送给处理单元以便做出后续处理。
- 绪论:主要介绍当前激光雷达的研究背景,国内外发展现状以及毕业设计的目的。
- 激光雷达的原理:主要介绍激光雷达测距的原理以及对误差及噪声的分析。
- 激光雷达电路的设计:主要介绍激光雷达各个模块电路的设计。
- 实验结果的测量:主要将实际电路的测量结果展示并进行分析。
- 测量结果处理: 主要对测量数据与实际值进行分析,选用合适的方法对数据进行处理,用公式来表示实际值与测量值间的线性关系。
- 总结: 对毕业设计的问题进行分析,提出未来改进的可能。
1.5本章小结
本章着重介绍了当前激光雷达的研究背景,引出了研究车载激光雷达课题的原因,接着介绍了国内外发展现状,为毕业设计提供了研究方向,后面说明研究意义,给毕业设计提供了设计的理论依据,最后介绍了本次毕业设计的内容,说明了整个毕业设计的大致框架。
第2章 激光雷达测距原理
2.1测距原理
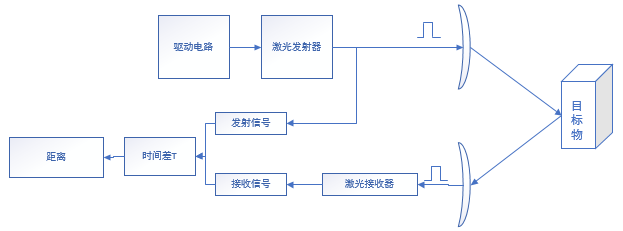
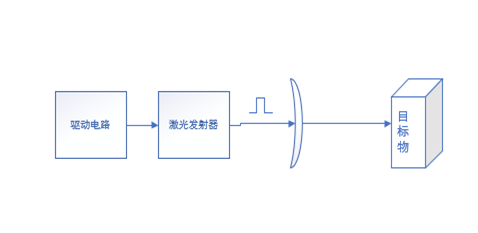
图2.1 激光雷达系统原理图
原理图如图2.1所示,选用飞行时间测距法(Time of Flight,ToF)。飞行时间激光测距仪由激光发射电路、光学镜片,激光接收电路时间距离转换电路构成。驱动电路驱动激光发射器发射激光信号,经过光学镜片、目标物反射给激光接收器,经过处理,接收信号与发射信号进行对比得出时间差,通过时间差计算出距离。检测距离随激光发射器发射信号的功率而增加。TOF测距方法的精度取决于激光器发射信号的形状,比如上升时间,脉宽以及激光接收器带宽和信号处理方式。上升时间越短,脉宽越小,带宽越大,精确度越高。反射回来的激光会因目标物体漫反射以及设备的衰减导致反射回来的激光功率较小。反射激光受发射功率,发射角度,目标物体性质等一系列因素影响。
2.2测距方法
2.2.1脉冲测距法
脉冲测距法原理是得到激光发射时间与激光接收时间的时间差来计算目标的距离的方法,即直接测量。本次毕业设计利用TDC-GP21作为时间数字转换电路,因此以激光发射器发出脉冲时的信号作为TDC-GP21的start信号。发射出的脉冲信号经过目标物体反射回来,经过光学镜片作用到APD、PIN等光电器件上,转换为电脉冲信号。转换后的电信号十分微弱,必须通过放大电路加以放大后作为TDC-GP21的STOP信号,使得TDC-GP21停止计时。得到STOP信号的时刻减去得到START信号的时刻即为飞行时间ΔT,通过公式:
S=C*ΔT/2 (2.1)
可计算出目标的距离S。由公式2.1以得知,该方法得到的结果主要通过飞行时间ΔT来得到,因此TDC-GP21的精度,发射脉冲的上升时间,光电器件的特性(比如延迟时间)与所得结果紧密相关,可以通过改进这些方面来提高短距激光雷达系统的性能。原理图如图2.2所示。
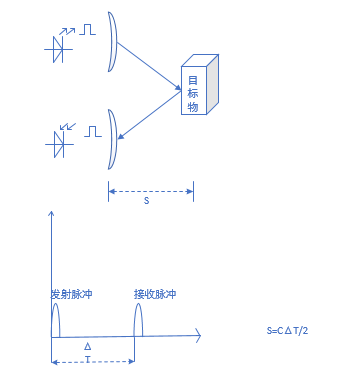
图2.2 脉冲测距法原理图
2.2.2相位测距法
相位测距法师通过得到激光发射时与激光接收时的相位差测量。通过得到发射信号与接收信号的相位差,再根据调制光的波长,换算相位延迟所代表的距离,即可得到当前位置与目标的距离,即间接测量。激光飞行时间公式为:
ΔT= (2.2)
(2.2)
其中表示为完整波的延迟角度, 表示剩余的不足一个完整的波的延迟角度, 代表光角频率。将ΔT代入直接距离计算公式即可得:
 (2.3)
(2.3)
其中n表示完整波数,Δn表示剩余不足一个完整波的占完整波的比例。相位测距法需要发射连续波进行测距,相比脉冲测距法来说,更适合短距测距,且更加精确。其原理图如图2.3所示。
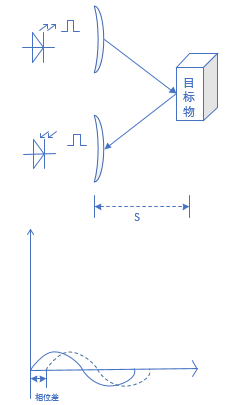
图2.3 相位测距法原理图
2.3发射信号的分析
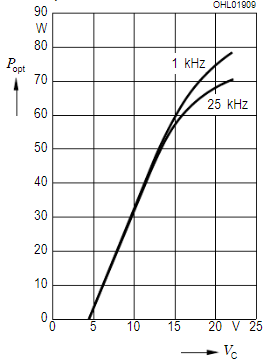
通过上文对误差的分析知,脉冲的波形对测量误差有一定的影响,上升时间大小会对信号的检测产生一定的影响。并且如果距离较远,低功率的信号很容易受到噪声的干扰,导致产生错误的结果而引起误操作。因此期望产生的激光脉冲有着上升、下降时间短,有相对比较窄的脉宽,相对较高的功率的特点。脉宽应谨慎确定,产生窄脉冲以防产生误差,然而如若太窄则对接收电路的带宽会有很高的要求,带宽过大则会引入很多噪声,对测量结果产生影响。同时激光功率也不应过大,虽然越大能测量距离越远,但是过大则会对人眼产生伤害,并且车载激光雷达对远距离测量要求也不高,因此选择数十瓦的功率足够满足测量的要求。此外为了获得窄脉冲,较小的上升下降时间,必须要有纳秒级的快速的RLC充电放电电路。OSRAM公司的SPL LLXX激光发射器内部集成了驱动电路,只需再自行设计MOSFET驱动电路以及窄脉冲产生电路便能发射出符合要求的激光信号。
2.4接收信号的分析
由激光发射器发射出的激光信号,射向目标物后发生反射,反射后的信号由APD,PIN等光电器件接收并进行光电转换以供后续放大、测量。光电转换是通过APD,PIN等光电器件将接收到的光信号转换成电流信号。在激光传播过程中,经过物体表面发生了漫反射,并且还会受到一定环境光的影响,因此接收到的信号十分微弱并有噪声影响,必须经过相应的处理才能作为测量信号来使用。用作测量的信号一般是电压信号,经光电转换后的信号是电流信号,因此需要先通过跨阻放大器将接收的信号转换成电压信号。由于存在偏置电流,放大倍数不能过大,光电转换后的光电流为数十微安,因此经过跨阻放大器以后的电压信号并不能满足测量要求,需要再进行放大才能用以测量。因为要对跨阻放大器的电压信号进行不失真的放大,因此要将通频带考虑在内。经过放大后的电压信号作为TDC-GP21的STOP信号,进行时间的测量,再经过单片机处理,得到测量结果。由上文可知,激光接收电路相较于发射电路,更为重要,接收信号的好坏决定着测量结果的好坏,必须对接收信号进行妥善的处理才能将其应用于检测。既不能有大失真,又要保证带宽合适,信噪比要高,因此对接收电路的要求比较高。
2.5误差分析
一个激光雷达测距系统没有较高的精确度就没有意义,本次毕业设计目的是设计一款车载用激光雷达,对测量的精确度也有一定的要求。毕业设计选用的是TOF测量方法中的脉冲测距法。原理已在上文中解释过,提高精确度,就必须获得高精度的飞行时间,下面对飞行时间误差进行分析。
2.5.1TDC-GP21的精度
TDC-GP21最小的时间精度决定了测量结果的精度,精度越高,产生的误差越少,此误差与选用的芯片有关,可以通过选择高精度的芯片来减少因为芯片精度而产生的误差。
2.5.2器件延迟误差
这个误差来源于电路中的电子器件的固定延时误差。指的是信号在系统中传播时因为器件固有延迟而造成实际时间与测量时间之间的误差。一般受环境条件影响,可以通过选用延迟较小的器件来减少这类误差。
2.5.3脉冲波形引起的误差
这个误差来源于脉冲信号波形,因信号上升时间与下降时间过大,脉宽过宽造成检测信号到来时间产生误差。这类误差可以通过改善脉冲信号波形来减少,比如通过电路设计产生较窄的脉冲信号。
2.6激光接收噪声分析
在激光雷达系统测量距离的过程中,或多或少会引入一定的噪声,为了让测量的结果更加精确可靠,必须尽最大努力将噪声控制在最小,要抑制噪声首先要了解噪声来源,接下来将介绍主要的噪声来源。
(1)自然光
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:
![C:\Users\Hasee\AppData\Roaming\Tencent\Users\269412196\QQ\WinTemp\RichOle\1S7O~M8NJX{`L]RPLVT$R%L.png](http://www.biyelunwen.org/wp-content/uploads/2020/02/lw4512_202021975149397.png)