基于线激光的三维测量系统设计毕业论文
2020-02-19 07:56:13
摘 要
随着材料、工业等各个领域的发展,对物体形态特征测量的要求也不断提高,传统的三维测量技术已难以满足日益增长的测量需求,现如今无接触式三维测量技术因其测量精度高、速度快、便携等优点,已应用到各个行业,如材料缺陷检测、公路测绘等。目前为止,国内外相关领域学者仍在不断发展、完善三维测量技术这一领域。
本次设计使用双目立体视觉结合线结构光扫描实现对物体快速准确的测量。首先采用张正友标定法对摄像机进行标定得到摄像机的内参、外参矩阵,使用基于Hession矩阵的光条纹提取法提取左右摄像机图片中的光条纹中心点的亚像素坐标。利用极线约束匹配找出左右两幅图片中光条纹中心点的匹配点,再根据三角法获得光点在摄像机坐标系下的三维坐标。当线结构光完成对测量工件的扫描之后,即可得到所有光点的三维坐标,即得到扫描的三维点云模型。然后进行点云的特征提取,首先,根据大致的距离关系,对扫描点云预处理,去除点云中无关背景的三维点,保留工件点云;其次,求出测量工件点云的拟合平面,将所有的点投影到拟合平面上,同时进行坐标系变换,将拟合平面上的三维点以二维坐标的形式表示;最后,在二维散点中找出边界点以及其他特征,进行坐标逆变换,将二维中的特征点转换为摄像机坐标系下的三维点。通过对测量工件的扫描获得测量工件表面的三维信息,最终实验结果表明此系统测量误差在1.27%左右。
关键词: 双目立体视觉;线结构光;三维测量;点云处理
Abstract
With the development of materials, industrial and other fields, the shape characteristic of the object detection requirements and continuously improve, the traditional three-dimensional measuring technology has been difficult to meet the growing demand, now the non-contact 3 d measurement technology for its advantages of high measurement precision, high speed, portable, has been applied to various industries, such as material defects detection and road surveying and mapping, etc. So far, scholars in related fields at home and abroad are still developing and perfecting 3d measurement technology.
Line structured light completely scans the surface of the measured workpiece, while the binocular camera shoots video on the measured workpiece, so the distortion of line structured light in each frame of video contains the topography information of the measured workpiece surface. After geting the camera internal and external parameter matrix by You zheng Zhang calibration method, we obtain the subpixel of light points on the image by Hession matrix, and through polar matching constraint, both match point in the picture is found, find out points were obtained according to the triangle method in the 3 d coordinates of camera coordinate system. When the linear structured light finishes scanning the measured workpiece, the 3d coordinates of all points of light can be obtained, that is, the 3d point cloud model of the measured workpiece. According to the general distance relation, the point cloud of the measured workpiece is preprocessed to remove the 3d points of irrelevant background in the point cloud. The fitting plane of the point cloud of the measured workpiece is obtained, and all points are projected onto the fitting plane. At the same time, coordinate system transformation is carried out to transform the three-dimensional points on the fitting plane. The boundary points and other features are found in the two-dimensional scatter, and finally the inverse coordinate transformation is carried out to convert the feature points in the two-dimensional to the three-dimensional points in the camera coordinate system. The 3d information of the measured workpiece surface is obtained by scanning the measured workpiece, and the final experimental results show that the measurement error of the system is about 1.27%.
Key words: binocular stereo vision; linear structured light; 3d measurement; Point cloud processing
目录
第1章 绪论 1
1.1 研究背景及意义 1
1.2 研究现状 2
1.2.1 接触式三维测量仪器 2
1.2.2 非接触式三维测量仪器 2
1.3论文研究内容及章节安排 3
第2章 双目线结构光测量系统的原理组成 5
2.1 测量系统的基本原理 5
2.2 双目成像模型 6
2.3极线约束匹配 7
2.4 本章小结 10
第3章 摄像机标定 11
3.1单目标定 11
3.1.1 单目成像模型 12
3.1.2 坐标系的定义 12
3.1.3 单目成像模型数学推导 12
3.2张正友标定法 15
3.2.1单应性矩阵计算 15
3.2.2 计算摄像机内参、外参计算 16
3.2.3 畸变参数的计算 17
3.3摄像机双目标定 18
3.5 本章小结 19
第4章 光条纹三维重构与点云特征提取 20
4.1 光条纹提取 20
4.2 线结构光的三维重构 21
4.3 点云处理 22
4.3.1 点云模型的预处理以及去噪 23
4.3.2 圆环圆心提取 24
4.3.2.1 点云投影 24
4.3.2.2 二维化坐标与坐标系转换 25
4.2.2.3 二维边界提取 26
4.2.2.4 聚类拟合与圆心坐标的逆变换 27
4.3 本章小结 28
第5章 双目线结构光三维测量系统实验分析 29
5.1 三维测量系统设计 29
5.1.1 硬件结构 29
5.1.2 软件设计 30
5.2 双目线结构光三维测量系统试验 30
5.2.1 摄像机单双目标定实验 30
5.2.2 测量工件表面三维重建 32
5.2.3 测量工件点云圆心特征提取 34
第6章 总结 36
参考文献 37
致谢 38
第1章 绪论
1.1 研究背景及意义
材料、军工、医学等领域的不断发展,对物体形态检测的精确度、速度等要求不断提高,传统的测量技术已难以满足日益增长的检测要求。如今三维测量技术因其速度快、精度高、便于携带等优势,已应用于各个领域,如在工程测量领域,利用三维测量技术进行大坝变形测绘、公路测量、隧道变形测绘等在结构测量领域,桥梁的结构测量、机械龚件的制造装配等。为了满足实际的测量需求,新型三维测量技术成为国内外科研人员的研究重点。70年代末,英国Mart教授提出“Marr视觉计算理论”,Marr从信息处理系统的角度出发,认为视觉系统的研究分为三个层次:计算理论层次、算法层次、硬件实现层次,从此之后三维测量技术得到了长足的发展。
国外的三维测量技术发展早于国内,导致现如今国内三维测量技术还不如国外成熟。早在1988年,Harris和stephens提出利用Harris算子检测图片中的角点[1].1998年,Steger提出利用Hession矩阵最大特征值对应的特征向量为图像像素变化最快的方向来提取光条纹中心点[2]。2004年David G. Lowe提出了一种从图像中提取特征不变特征的方法,该方法可用于对象或场景的不同视图之间的可靠匹配[3]。2006年,Herbert等人改进SIFR算法,提出Speeded Up Robust Features(SUFR)算法,应用于特征点检测。基于不断提出的算法,国外也投入大量人力物力发展三维测量技术,使之商业化。目前市场上线结构光视觉测量系统比较知名的品牌有英国的3D Scanners公司、德国的Leica公司、法国的Kreon公司、瑞士的Tesa公司、比利时的Metris公司、美国的Perceptron公司等,其中英国的3D Scanner公司最早开发三维激光系统[4]。德国GOM公司研制的atos流动光学扫描仪采用可见光,将特定的光栅条纹投射到测量工件的表面,利用光学拍照原理和光栅测量原理可以获得大量工件点云,综合精度小于0.1mm/m。
国内许多研究人员也致力于将三维测量技术应用于日常生活中,清华大学罗先波等人通过引入特征点和改进最近点迭代法,提出了一种在三维扫描系统中对三维点云数据进行配准的方法 [5]。祁琳等人对三维测量技术在体表损伤程度鉴定实践工作中的应用进行探讨[6]。郑州大学曾松劲等人通过定位工装板来间接定位工件的方法来完成双目视觉引导机器人抓取[7]。大连海事大学费鹏通过实验,将三维重建技术应用于海洋场景下实现无人艇对环境的感知[8]。合肥工业大学殷玉龙研制出自定位线的三维测量系统[9]。浙江大学卢岸潇设计了端到端的立体匹配卷积神经网络实现场景的视差估计,克服了传统算法的缺点,并根据视差估计结果对场景进行了三维重建[10]。华南理工大学彭泽林针对双目视觉测量中所使用的SURF图像匹配算法精度不高的问题,提出了一种改进SURF算法的图像匹配方法并将其运用到双目视觉测量中[11]。但与国外相比,国内三维测量技术还存在差距,因此本文提出一种双目线结构光三维测量系统,着重于双目视觉原理、图像处理、点云特征提取算法,借助于线结构光与双目摄像机以及相应算法建立测量工件的点云模型并提取其特征。
1.2 研究现状
随着军工、医疗、材料等领域的不断发展,对三维测量的要求不断提高,各种三维测量仪器也随之出现,大致可以分为接触式与非接触式。
1.2.1 接触式三维测量仪器
接触式三维测量仪器需要测头接触工件并发出采点信号,由控制系统去采集相对于机床坐标系的坐标值,再由计算机对数据进行处理。如图1.1所示为德国爱德华公司生产的MGH-高精度系列三坐标测量机。通常的接触式三维测量仪器需要与工件接触,可能会对工件造成划损,同时受限于机器的大小,较大的工件需要多次测量甚至不能测量,而且这种仪器价格高昂,成本较高。

图1.1 MGH-高精度系列三坐标测量机
1.2.2 非接触式三维测量仪器
通常的非接触式三位测量仪器都与激光有关,按原理不同分为三类:飞行时间法(TOF),单目结构光法,双目立体视觉法
1)飞行时间法
飞行时间法的基本原理是发射连续的不可见光脉冲,通过传感器接收反射回来的脉冲光,同时记录光脉冲的往返时间,通过光脉冲的往返时间来计算测量工件的深度信息,目前比较流行的此类测量仪器有微软的Kinect2相机。采用飞行时间法的测量仪器具有体积小巧便于携带,受工件表面灰度、纹理等信息的影响较小等优点,其精度不随距离的增加而变化,在中远距离的测量上占优势,其缺点在与其精度难以突破到毫米级,通常都是厘米级,这导致飞行时间法在近距离的测量上不如其他方法。
2)单目结构光法
单目结构光法将结构光投射到工件上,在图像上提取光条纹中心点的坐标,然后再根据摄像机标定的的坐标系变换矩阵以及激光三角原理,把图像坐标系上的光点坐标变换成摄像机坐标系下的三维光点坐标。单目结构光法的优点在于近距离(10m以内)精度较高,一般可达0.01mm-1mm,同时不受外部光源干扰,但是缺点在于对于远距离测距不适用,同时容易受材料反光的影响。
3)双目立体视觉法
双目立体视觉法利用两个相机对物体拍照,在两个相机图片的公共区域利用极限约束找到匹配特征点,利用每对匹配特征点的图像坐标以及相机的内参数和外参数计算出摄像机坐标系下工件的点云模型。双目立体视觉受外部光源的影响较大,如在夜晚外部光源不足的情况下,左右相机图片中的纹理不清晰,导致立体匹配不准确。而其优点在于具有效率高、精度合适、系统结构简单、成本低。
1.3论文研究内容及章节安排
本设计致力于基于双目线结构光三维测量系统的研究,主要研究内容如下:单、双目摄像机的标定,双目线结构光立体视觉模型的建立、图像光条纹中心提取、光条纹中心的立体匹配,点云模型的特征提取。
论文章节内容架构如下:
第1章 绪论。介绍三维测量技术的研究背景意义,介绍三维测量技术的国内外研究现状,已有三维测量仪器的基本工作原理。
第2章 双目线结构光测量系统的原理及组成。研究双目线结构光的基本原理、设计方案以及其核心算法。
第3章 单、双目摄像机的标定。本章研究了三维测量中的坐标系变换以及张正友标定法的基本原理以及标定操作的步骤。
第4章 光条纹重构以及点云特征提取。本章使用Steger[2]提出的光条纹中心提取法,基本原理为图像Hession矩阵最大特征值对应的特征向量为图像像素变化最快方向,以此得到光条纹中心点的图像坐标,并根据左右相机中光条纹中心点坐标完成立体匹配得到工件的点云模型。点云模型特征提取,对得到的点云模型进行特征提取,得到点云模型的边界、圆心, 并进行精度分析。
第5章 双目线结构光实验分析。得到双目摄像机的标定参数、测量工件的三维点云模型,测量工件的特征信息,给出各实验实验精度。
第6章 最后进行总结和展望。
第2章 双目线结构光测量系统的原理组成
本章主要研究双目线结构光测量系统的原理以及组成,并根据双目立体匹配的基本原理推导其数学公式。
2.1 测量系统的基本原理
利用双目摄像机可以直接得到外部景象的三维点云模型,且此种方法原理简单、成本低、精度高、可实现无接触测量,但是受到外部光源的影响较大,当外部光源不足时难以获得图片上的纹理信息。在此基础上我们加入线结构光,相当于人为的为测量工件加入纹理信息,当外部光源不足时,我们可以通过检测线结构光在工件上的扭曲程度获得工件的纹理信息,使得双目匹配更为准确。本文提出的双目线结构光三维测量系统可实现空间形貌的重构。
本三维测量仪结构包括双目摄像机一台,支架(用于固定摄像机),线激光发射器,,棋盘标定板,计算机(包含相关算法)。
本测量仪的工作要点可归纳为:
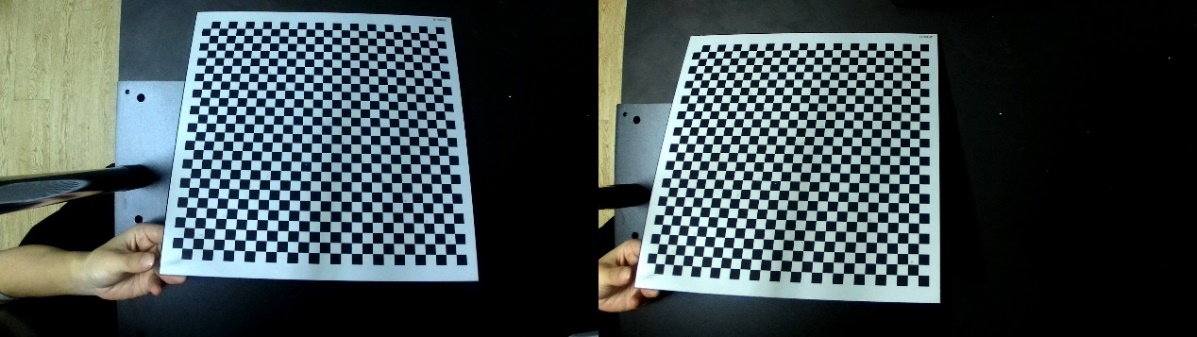
1)使用棋盘标定板对双目相机进行单双目标定,获得单个相机的内参以及两个相机之间的外参;
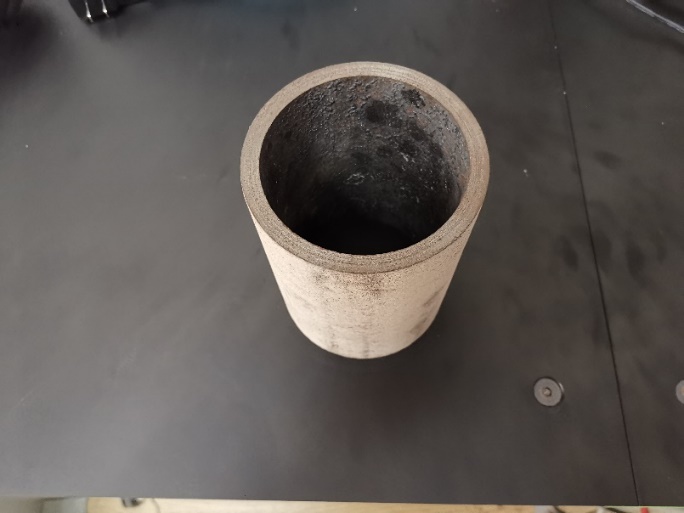
2)打开双目摄像机开始拍摄,同时通过移动平台控制先激光发射器移动,使线激光完整的扫描过工件,保存视频;
3)逐帧提取左右相机视频图片,根据Steger提出的Hession矩阵最大特征值对应的特征向量为图像像素变化最快的方向提取提取出图片光条纹中心点坐标,并亚像素化;
4)根据摄像机标定得到的摄像机参数对已得到的光点图片进行畸变校正、立体矫正,使得左右图片特征点行对齐,根据视差原理计算出光点的摄像机坐标,得到测量工件的点云模型;
5)对点云模型处理,得到点云模型的特征,如边界、圆心等。
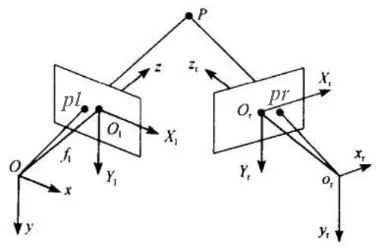
由上流程可知,本测量仪的基础在于双目成像模型, 线激光的三维重构依赖于双目成像模型。所以接下来本文着重介绍双目成像系统,描述三维重构的数学的推导,给出三维重构的数学公式,并推导三维重构中立体匹配的数学公式。
2.2 双目成像模型
两台工业相机共同配合对外获得特征信息可构成一个双目成像系统模型,并不强制要求两台型号相同的相机,但应该保持相互适配[9],且使得测量工件在两个相机的公共视野范围内。根据相关的数字图像处理算法以及视差原理可以完成对外部景象的三维重构,双目成像模型如图2.1所示。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: