基于单片机的智能灭火机器人的设计毕业论文
2020-02-19 07:57:12
摘 要
随着我国经济迅速发展,城市化的进程越来越快,大量的高层建筑拔地而起,大型商场、物流仓库、易燃物品的存储仓库等场所的规模也在不断扩大,导致近年来火灾频繁发生。这些可能发生火灾的场所通常伴随着巨大的危险,消防人员不易进入,灭火救援行动难以及时开展,因而由火灾导致的财产损失和人员伤亡通常非常严重,研究智能灭火机器人刻不容缓。本设计中的智能灭火机器人使用了高性能、低功耗、接口丰富的STM32作为控制芯片,便于实现智能灭火机器人功能的拓展。
本设计中的智能灭火机器人采用了双轮平衡小车的设计,相对于四轮机器人具有更高的灵活性和火场机动能力,适合在复杂条件下快速找到火源进行灭火。
本文首先介绍了智能灭火机器人的主控制器、传感器以及电机的选型;之后根据所选择的器件搭建了硬件系统,设计了相应的控制电路、电机驱动电路和电源电路;然后在软件设计方面,机器人姿态控制算法通过JY-901姿态传感器快速获取机器人当前姿态信息,并传递给控制器,进而控制电机的转速和正反转来保证机器人能够平衡直立行走,并且结合光电传感器、火焰传感器等传感器设计了灭火机器人转向的算法,实现灭火机器人在复杂环境中自主循迹避障和寻找火源的功能。
关键词:STM32;灭火机器人;PWM控制;传感器
Abstract
With the rapid development of China's economy, the process of urbanization is getting faster and faster, and a large number of high-rise buildings are emerging. The scale of large-scale shopping malls, logistics warehouses, storage warehouses for flammable materials, etc. is also expanding, leading to fires in recent years. It happens frequently. These places where fires may occur are often accompanied by huge dangers. Firefighters are not easy to enter, and firefighting and rescue operations are difficult to carry out in time. Therefore, property damage and casualties caused by fires are usually very serious. It is urgent to study intelligent fire extinguishing robots. The intelligent fire extinguishing robot in this design uses the STM32 with high performance, low power consumption and rich interface as the control chip, which is convenient for the expansion of the function of the intelligent fire extinguishing robot.
The intelligent fire-extinguishing robot in this design adopts the design of the two-wheel balance trolley. Compared with the four-wheeled robot, it has higher flexibility and fire field maneuverability. It is suitable for quickly finding fire sources to extinguish fire under complicated conditions.
This paper first introduces the selection of the main controller, sensor and motor of the intelligent fire extinguishing robot; then builds the hardware system according to the selected device, designs the corresponding control circuit, motor drive circuit and power supply circuit; then in software design, The robot attitude control algorithm quickly acquires the current attitude information of the robot through the JY-901 attitude sensor and transmits it to the controller, which in turn controls the rotation speed and forward and reverse of the motor to ensure that the robot can balance the vertical walking, and is designed with sensors such as photoelectric sensors and flame sensors. The algorithm of the fire-fighting robot steering realizes the function of the fire-fighting robot to autonomously follow obstacles and find the fire source in a complex environment.
Key Words:STM32;Fire extinguishing robot;PWM control;sensor
目 录
第1章 绪论 1
1.1 设计背景及意义 1
1.2 灭火机器人的发展历程 1
1.3 国内外研究现状 2
1.4 论文研究内容与章节安排 3
第2章 智能灭火机器人总体方案设计 5
2.1 设计需求分析 5
2.2 智能灭火机器人系统组成 5
2.3 单片机选型 6
2.4 传感器的选型与分析 7
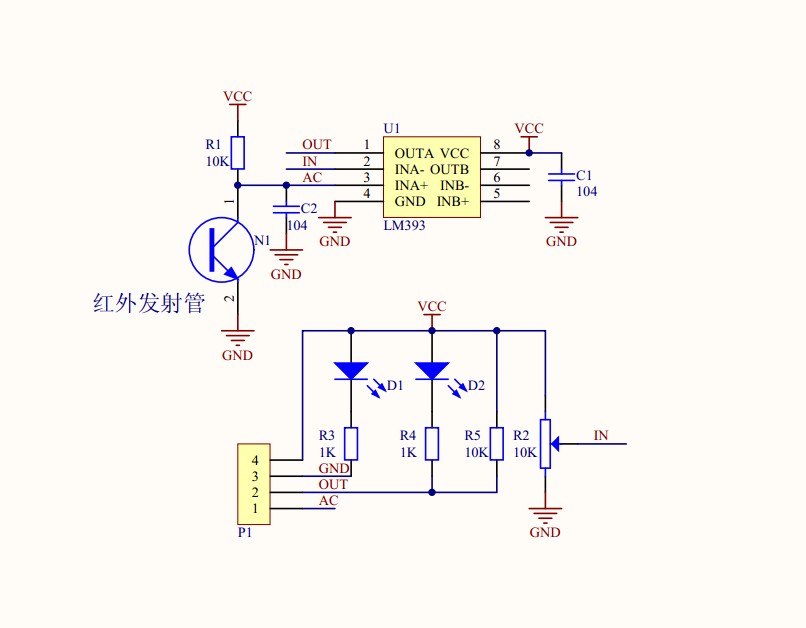
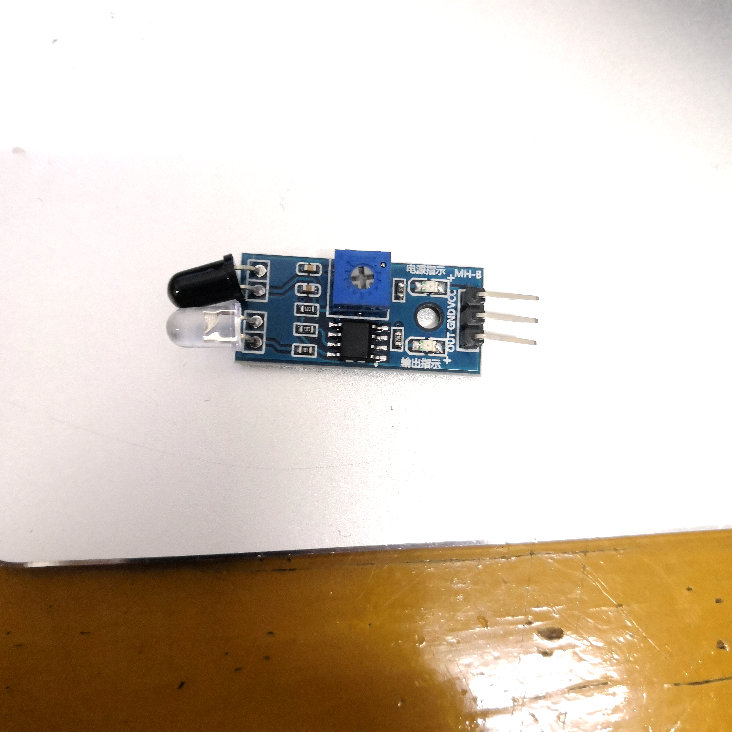
2.4.1 火焰传感器 7
2.4.2 光电循迹传感器 8
2.4.3 超声波测距模块 8
2.4.4 姿态传感器 9
2.5 电机及其驱动选型与分析 10
2.5.1 电机选型 10
2.5.2 电机驱动选型 11
2.6 本章小结 12
第3章 智能灭火机器人硬件系统设计 13
3.1 主控制电路设计 13
3.2 电机驱动电路设计 14
3.3 电源电路设计 14
3.4 机械结构设计 15
3.5 本章小结 16
第4章 智能灭火机器人软件设计 17
4.1 软件总体设计方案 17
4.2 姿态传感器控制算法设计 18
4.2.1 JY-901串口通信 18
4.2.2 JY-901数据处理算法 19
4.3 智能灭火机器人电机控制 20
4.3.1 PWM控制原理 20
4.3.2 PWM控制算法 21
4.4 智能灭火机器人平衡算法设计 22
4.4.1 平衡控制原理 22
4.4.2 平衡控制算法 24
4.5 智能灭火机器人转向算法设计 25
4.6 本章小结 26
第5章 总结与展望 27
5.1全文总结 27
5.2展望 27
参考文献 28
附录 29
附A1 STM32主控板原理图 29
附A2 智能灭火机器人整体电路原理图 30
附B1 主控板PCB图 31
致 谢 32
第1章 绪论
1.1 设计背景及意义
在这几年以来,我国社会发展越来越迅速,现代化建设的步伐不断加快,经济快速发展,城市化进程越来越快,随之而来的是高层建筑、大型商场和物流仓库等存在火灾隐患的场所越来越多,导致近年来火灾的发生十分频繁。据消防救援局官方统计数据显示仅2016年一年由于火灾造成的直接财产损失高达37.2亿元,伤亡2500余人。在发生火灾之后,火灾现场环境通常十分复杂,救援难度极大,救援人员想要第一时间进入火灾现场变得极为困难,为了尽快开展救援行动,同时探明现场情况,争取宝贵的时间,灭火机器人应运而生。
近年来,大型的火灾事故频发, “8·12天津滨海新区爆炸事故”造成重大人员伤亡,直接经济损失达到60多亿元。调查组认定的事故原因是违规存储危险货物,导致少部分货物自燃,并未能及时发现。这就导致了大量危险化学品燃烧,产生爆炸。倘若能够配备智能灭火机器人,在火情刚出现时及时进行处理,火情或许能在扩大前得到很好地处理。再如5.5桂林民房火灾导致5名大学生死亡,火灾原因初步认定是夜间电动车充电时电池起火,没有人发现起火,导致火情扩大,酿成惨剧。由此可以看出由于人为的疏忽和火情监控缺失引起的火灾不在少数,近年来科技预防火灾的观点越来越多的科研机构提起,使用智能设备,来提前发现火情、帮助消防员灭火是当前国内消防事业的迫切需求。
灭火机器人涉及众多的领域,比如人工智能、计算机视觉等领域,还需要自动控制原理和传感与检测等技术的支持。灭火机器人适合在复杂环境下协助消防员开展火场的救援,提高灭火效率。同时在火灾高发地区能及时发现突发的火情,及时做出相应的应对方法,有利于降低重大火灾发生的概率,这对于保障人民群众的生命财产和消防员的人身安全有着重大意义。因此发展智能灭火机器人在当前社会环境下具有十分重要的意义。
1.2 灭火机器人的发展历程
第四次工业革命的进程在这几年以来不断地加快,人工智能、机器人等技术得到了迅速地发展,在各行各业中,各种智能机器人不断出现。同样的,消防事业对机器人的需求也越来越迫切。在国内外,机器人技术已经发展了很多年,很多国家和企业都取得了显著的成果,以机器人技术为基础的灭火机器人技术也得到了迅速发展。
在20世纪80年代开始,许多国家都意识到了在消防工作中可以适应恶劣环境,并及时开展救援的灭火机器人的重要性,从而开始投入大量资金研究灭火机器人技术。中国机器人研究始于20世纪80年代末。上海消防研究所,上海交通大学和上海消防局三家研究机构合作开发了我国第一台灭火机器人。目前,由上海消防研究所研究自行式消防炮和履带式探测机器人也已在国内采用。虽然我国的灭火机器人研究已经取得了一些成果,但中国灭火机器人的研究开始时间不长,多数产品不能够自主寻找火源、不能自主避开障碍快速救援。因此本文设计了一种能够自主寻找火源、同时能够避障的智能灭火机器人来解决这一问题,实现了灭火机器人在火灾现场灵活机动,快速救援,能有效地提高救援效率,减少人民的生命财产损失。
1.3 国内外研究现状
目前国内火灾防灾减灾的方式主要是定点设置烟雾报警器、自动洒水喷头等,仅能够检测是否发生了火灾,但不能针对火灾现场复杂的环境做出应对;对于已经发生的火灾只能进行报警或是定点喷水的处理。因此国内外目前都开始大力研究灭火机器人,做到火情早发现、早处理,能够应对复杂的火场环境,协助消防人员进行灭火救援。
我国消防装备研究部门于20世纪80年代末开始研究和灭火机器人相关的技术,2002年6月,“履带式、轮式消防灭火机器人”研制成功,这一机器人是国家863项目的成果,在之后的检验中也被国家进一步验收通过。这也是我国灭火机器人研究的一大重要成果[1]。
截至2007年,我国消防部队配备已经配备了灭火机器人来协助消防员进行消防作业, 目前JMX-LT50型灭火机器人在我国消防部队装备较多。这种灭火机器人采用了轮式底盘的设计能够实现一定的越障功能,还可以通过红外摄像头来观察火场情况,帮助消防队员进行火灾救援。
我国消防部队还配备了一些从国外引进的消防灭火机器人,比如有一些消防部队装备了“路虎 60”雪炮车。“路虎 60”雪炮车与JMX-LT50型灭火机器人最大的不同就是,这种灭火机器人的灭火机构较大,还具有3中不同的灭火模式,可以吹散火场的浓烟或者是喷射泡沫灭火。可以应对多种不同类型的火灾事故,应用范围更加广泛。
所以,总的来看,我国消防部队配备了多种不同的消防灭火机器人,除了JMX-LT50型灭火机器人和“路虎 60”雪炮车,还有一些消防部队装备了Brokk-50 型消防破拆机器人、格拉曼MP60 多功能消防机器人。但是这些机器人配备的数量并不多,在一些经济较为发达的消防部队才有2~5台[2]。
虽然我国的消防部队已经配备了消防灭火机器人,但是在配备了消防灭火机器人之后,消防部队的消防灭火机器人真正参与救援的次数并不多,远远未达到预计中的次数。造成这种情况的原因主要有以下几点:
(1)很多消防灭火机器人的移动能力较差,这就会使消防灭火机器人进入火场灭火产生困难,从而使其在灭火上的优势难以发挥。
(2)消防灭火机器人的应用机制不完善。由于消防灭火机器人其本身具有的不足,导致其在使用上有一些局限性,因此消防部队对这些消防灭火机器人的应用没有重视起来,使原本能够应用消防灭火机器人的时候也没能充分发挥出作用。
在国际上,灭火机器人最先由日本开始研发,灭火机器人的发展在国外是较为迅速的,灭火机器人的抗高温、穿越障碍物和实时通信的功能已经有国外学者正在研究[3]。比如,一种新型的可以在室内作业的消防灭火机器人由沙特学者Aihaza提出并研发。这种灭火机器人能够在多层建筑物内通过攀爬楼梯进行移动,可以适应很多种不同的室内环境,专门为室内消防灭火所研制。并且在火灾现场,温度通常很高,它可以在700℃高温下连续工作一个小时。并且在火场中,它可以实现实时通信的功能,不仅可以和被困以及受伤人员进行通信,还可以向外部救援人员发送视频信息,帮助救援人员更好地掌握火灾现场的情况。同时,这种消防灭火机器人具有独特的通信算法,可以通过使用一个遥控器操作多个机器人,使它们协同作业[4]。
在国外消防灭火机器人的发展相对于国内较为迅速,各种新型的灭火机器人的层出不穷,在实际消防救援工作中这些灭火机器人发挥了巨大作用,目前遥控型机器人在世界各国的各种火灾救援任务中使用较多。并且这些机器人的任务主要有两点:一是进入现场进行灭火作业;二是对火灾现场的情况进行初步勘探。大部分灭火机器人都装有摄像机,还安装很多传感设备,因此能够精准地探测火场信息。但目前灭火机器人在自主寻找火源方面还并不成熟,本文也正是针对这一问题设计了一种能够自主寻找火源的智能灭火机器人。
1.4 论文研究内容与章节安排
本文的研究对象是一种基于STM32的智能灭火机器人,主要对智能灭火机器人采用的传感器和主控电路进行了研究,并且还研究了该智能灭火机器人的软件系统,通过对软件系统的研究实现了智能灭火机器人平衡行走,自主寻找火源,循迹避障的功能。
本文的章节安排如下:
第1章 绪论。首先阐述了项目的研究背景及意义,之后简要说明了灭火机器人的发展历程,最后通过介绍当前国内外研究的现状并,说明了研究智能灭火机器人的重要性和必要性。
第2章 智能灭火机器人总体方案设计。通过分析智能灭火机器人的设计需求,明确了该智能灭火机器人的系统组成,然后根据其系统组成对需要用到的单片机、传感器、电机等元件进行选型,简要分析了系统各部分的原理。
第3章 智能灭火机器人硬件系统设计。完成智能灭火机器人的硬件系统,设计并搭建了相关电路,完成了智能灭火机器人的机械结构的设计。
第4章 智能灭火机器人软件设计。完成了智能灭火机器软件设计的总体方案,阐明了姿态控制原理及算法,说明了电机控制的原理,并介绍了平衡控制算法和转向算法的设计方案。
第5章 总结与展望。对本文中设计的智能灭火机器人进行了总结,说明了所取得的成果,并对目前所存在的不足进行了展望。
第2章 智能灭火机器人总体方案设计
2.1 设计需求分析
通过分析当前市场上的灭火机器人存在的缺点和不足,本设计中的灭火机器人应具备在较强的机动能力,能够在火灾现场十分复杂的情况下准确找到火源位置,所以应该具有循迹避障的功能,此外为了能够第一时间发现火源,智能灭火机器人需要具有自主寻找火源的功能。故其基本设计需求如下:
- 能够自主直立行走,并进行转向等操作;
- 能够实现自主循迹避障的功能,在障碍物前15-20cm停车并按照程序转向;
- 事故实现自主寻找火源的功能,能够探测到机器人周围100触摸范围内的火源,并在火源前方停下进行灭火。
2.2 智能灭火机器人系统组成
本设计中的智能灭火机器人采用的主控制器是STM32单片机。获取周围环境信息和自身姿态信息主要通过光电传感器、超声波传感器、姿态传感器等传感器实现。直流电机由PWM信号驱动,调节电机转速可以通过修改PWM信号的占空比来实现。其系统组成框图如图2.1所示。
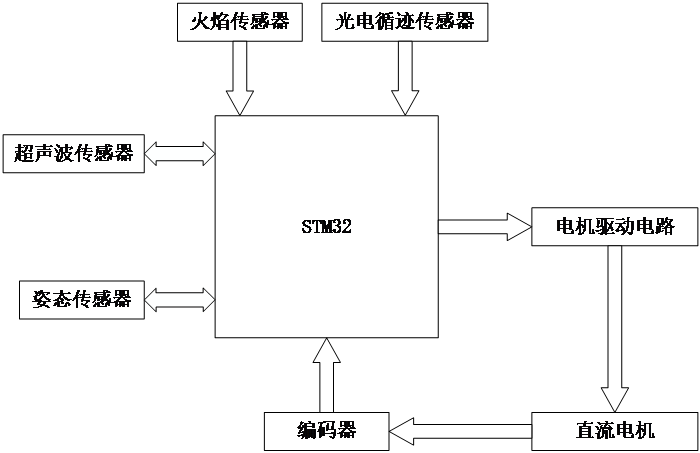
图 2.1智能灭火机器人系统组成框图
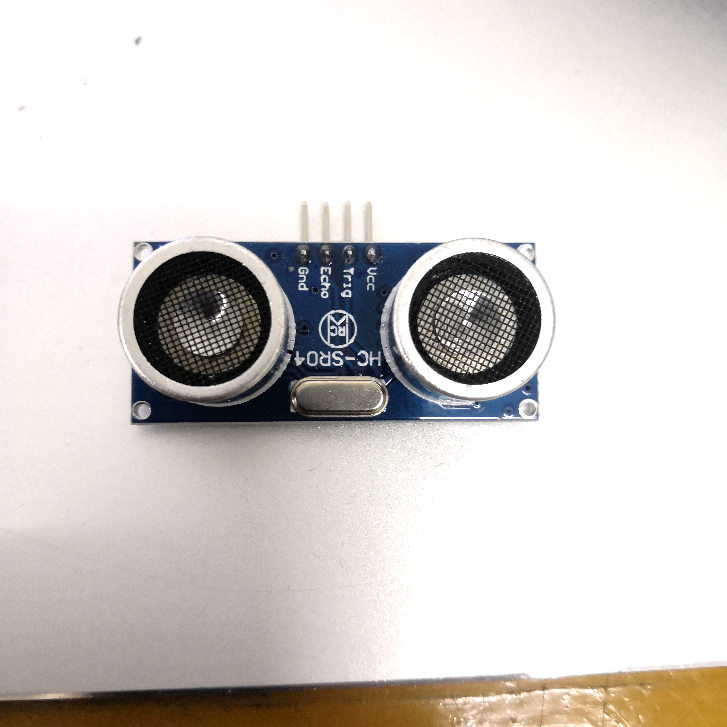
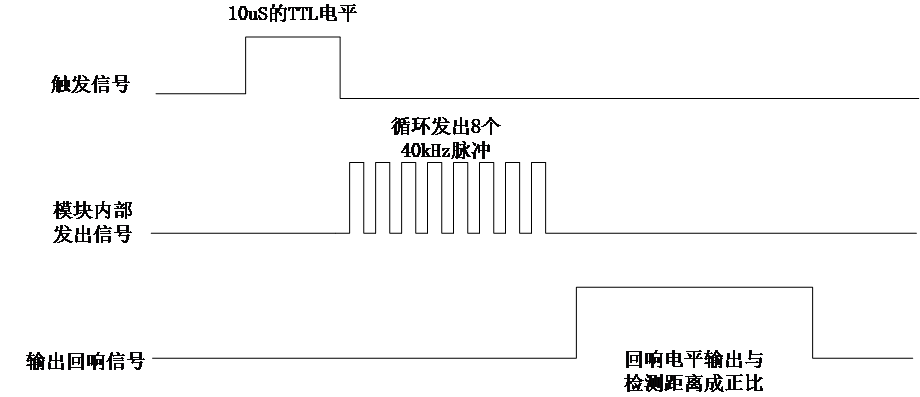
该智能灭火机器人通过光电传感器、超声波测距模块检测外部环境情况,并将检测到的其他类型的信号转换为电信号传递给STM32单片机,STM32单片机根据外部信息结合循迹避障的算法来实现灭火机器人的自主避障和循迹的功能。
从在火灾现场灵活机动这一目的出发,该智能灭火机器人以双轮平衡小车作为底盘,通过JY-901姿态角度传感器获取底盘姿态信息,然后按照规定的通信协议将16进制的数据发送给STM32单片机,STM32单片机在接收到数据后,依照相应的控制算法进行处理,然后可以得到底盘的俯仰角和角速度等参数,最后通过PID控制算法来调节的PWM的占空比,以达到调节电机转速的目的,同时根据灭火机器人底盘倾斜的方向来确定电机的转向,使智能灭火机器人能够平衡直立行走。
在检测火焰时,火焰传感器通过红外敏感型元件对红外信号强度进行检测,然后将红外信号转换我为灭火小车可以识别的电信号,从而来获取火焰信息。通过多个传感器的配合使用,可以使机器人对周围环境分析更加准确,增加机器人寻找火源的准确性和快速性。
2.3 单片机选型
本设计中的智能灭火机器人采用的控制器是基于ARM Cortex M4F处理器内核的STM32F4系列单片机,单片机实物如图2.2所示。该单片机最小系统简单,提供多达144个引脚,具有1MB闪存,能够连接丰富的外设,具有多达15个通信接口,便于接收传感器的数据[5]。其内部封装仅为10*10mm,最小系统板体积较小,在设计灭火机器人底盘的结构的同时能够节约出更多的空间,便于传感器的安装。同时STM32系列单片机具有丰富的软件包支持,在MDK开发环境下可以通过调用库函数来实现较复杂的功能,一定程度上降低了编程难度,提高了编程效率。

以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: