基于OpenSim的人体直立仿生控制毕业论文
2021-11-27 22:33:08
论文总字数:29529字
摘 要
在人体力学研究及康复医疗设备设计过程中,出于安全及伦理考虑,一般情况下难以用常规手段计算肌力、进行“预测性”的研究。因此,为了研究人体直立时的踝关节控制策略,观察肌肉运动特征,本研究使用OpenSim开源仿真软件搭建踝关节仿真平台,设计肌肉控制算法CMC(Computed Muscle Control Algorithm),模拟人体踝关节肌肉反射行为,并验证肌肉反射控制对直立抗扰动的作用。本文进行了如下研究:
(1)确定人体肌肉骨骼模型,基于人体的肌肉结构和力学模型,调整模型肌肉参数,加入接触实体。
(2)完成人体倒立摆建模,设计肌肉控制算法,加入PD控制器,实现用代码对肌肉的控制。
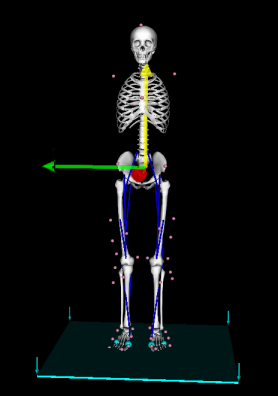
(3)在OpenSim上完成人体静态直立仿真,得出生理曲线;在此条件下,施加定向扰动,结合牵张反射的控制机理,通过对模型肌肉长度和速度的反馈控制,使模型维持平衡,并再次恢复平衡状态。仿真后可得到模型肌肉长度、肌肉力等数据,分析相关数据,验证了牵张反射机制在人体直立平衡中的重要性。
(4)初步探究了直立仿真初期出现的肌肉痉挛问题,并提出了减小微分系数法与减弱地面反作用力法两种改善方案。
本文通过完成人体直立抗扰动仿真,得出人体生理曲线,为开展康复设备和智能机器人研发提供理论依据。
关键词 肌肉骨骼模型;OpenSim;牵张反射;直立抗扰
Abstract
In the research of human body mechanics and the design of rehabilitation medical equipment, for the sake of safety and ethics, it is difficult to calculate muscle strength and carry out "predictive" research by conventional means. Therefore, in order to study the ankle joint control strategy and observe the characteristics of muscle movement when the human body is upright, this study uses OpenSim open-source simulation software to build the ankle joint simulation platform, designs the muscle control algorithm CMC (calculated muscle control algorithm), simulates the human ankle joint muscle reflex behavior, and verifies the effect of muscle reflex control on the vertical anti disturbance. This thesis studies as follows:
(1) To determine the human musculoskeletal model, based on the human muscle structure and mechanical model, adjust the model muscle parameters, and add the contact entity.
(2) Complete the modeling of human inverted pendulum, develop muscle control algorithm, add PD controller, realize the control of muscle with code.
(3) The static upright simulation of human body is completed based on OpenSim, and the physiological curve is obtained; under this condition, the directional disturbance is applied, combined with the control mechanism of stretch reflex, and the model muscle length and speed are controlled by feedback, so that the model can maintain balance, and reach the static upright state again. After the simulation, we can get the data of muscle length and muscle force, analyze the relevant data, and verify the importance of stretch reflex mechanism in human upright balance.
(4) In this paper, the muscle spasm in the initial stage of vertical simulation is studied, and two improvement schemes are proposed, which are reducing differential coefficient method and reducing ground reaction force method.
In this paper, the physiological curve of human body is obtained through the simulation of human body standing anti disturbance, which provides theoretical basis for the development of rehabilitation equipment and intelligent robot.
Keywords: Musculoskeletal model;OpenSim; Stretch reflex;upright anti disturbance
目 录
摘 要 3
Abstract 4
第1章 绪论 7
1.1课题研究背景及意义 7
1.2国内外研究现状 7
1.2.1OpenSim研究应用现状 7
1.2.2人体直立抗扰动研究现状 8
1.2.3肌肉反射研究现状 9
1.3本文研究内容 9
第2章 人体直立模型 10
2.1人体站立机理 10
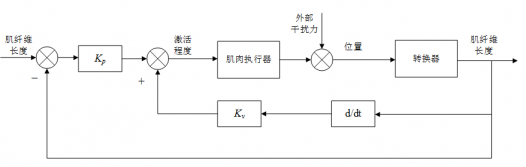
2.2肌肉反射控制模型 11
第3章 OpenSim建模关键技术介绍 13
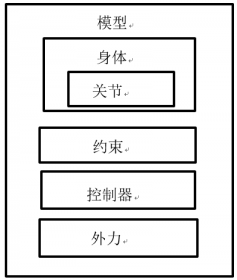
3.1OpenSim模型组成 13
3.1.1 OpenSim模型概述 13
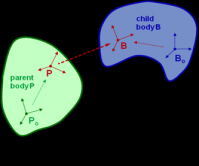
3.1.2主体与关节 13
3.1.3执行机构与观测器 14
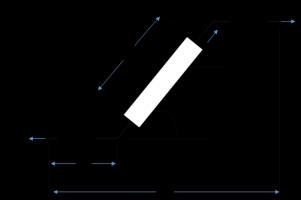
3.2肌肉骨骼建模的理论基础 14
3.3肌骨模型选取与参数调整 15
第4章 直立及抗扰仿真 18
4.1肌肉控制算法设计 18
4.1.1PD控制器 18
4.1.2main函数 21
4.2直立状态反射控制仿真 23
4.3扰动下反射控制仿真 25
4.3.1基于质心控制的抗扰仿真 25
4.3.2基于牵张反射的抗扰仿真 28
4.4 肌肉痉挛初步探究 29
4.4.1 减小微分系数法 30
4.4.2 减弱地面反作用力法 30
第5章 总结 32
参考文献 33
附录 35
致 谢 40
第1章 绪论
1.1课题研究背景及意义
随着我国人口老龄化程度的加剧,由中风等疾病造成行走困难的患者逐渐增多。在康复医疗领域,用软件进行人体下肢仿真以辅助进行康复治疗,变得尤为紧迫。而在双足机器人研发领域,没有很有效的方法使踝关节能快速响应外部扰动,所以研究踝关节的抗扰动机制也变得尤为重要。
OpenSim是斯坦福大学研发的免费开源软件,供全世界的学者开发、分析和可视化人体肌肉骨骼模型。它在很多领域应用广泛,如步态曲线分析、运动员状态研究、康复医疗器械设计等。使用OpenSim进行人体直立结构仿生控制,将进一步为相关领域的发展提供理论支撑。
当人体处于直立状态时,踝关节及相关肌肉群的调节对维持直立平衡起着至关重要的作用。使用OpenSim搭建踝关节仿真平台,模拟人体踝关节肌肉反射行为,一方面,有助于研究人体踝关节力学特性和运动控制机制,进一步了解人体平衡策略及抗扰动机制;另一方面,对于康复医学研究及仿人机器人设计具有重要意义。
1.2国内外研究现状
1.2.1OpenSim研究应用现状
OpenSim经过十几年的发展,已经成为人体建模仿真研究不可或缺的工具。近年来,高精度的人体动力学仿真受到越来越多国内学者的重视,国内学者在人体建模仿真软件的应用方面也进行了很多探索,其中OpenSim、SISM、AnyBody和LifeMod等应用最为广泛。其中,SISM是全世界第一个可进行人体建模分析的软件,但其价格昂贵;AnyBody可对人体生理学特性进行仿真与计算,但其肌肉控制不够精确,且无法完成本研究所需要的正动力学仿真;LifeMod易于输入实验者人体数据以自创肌肉骨骼模型,但进一步修改困难,二次开发难度大;相对于前面三种软件而言,OpenSim的功能更为强大,肌肉控制更为精确,可以提供更完整的框架,以便开展高效的仿真研究与分析。
至今,OpenSim的建模仿真应用已从最开始的下肢运动分析,逐步转为上肢乃至全身运动分析;用其建立起的人体模型也从最初的肌肉骨骼模型,发展到包含各种外界环境与辅助设备的模型;研究方向也从最初的应用OpenSim软件分析实际运动问题,深入到探究理论方法和进行OpenSim再开发层面。
目前国外对OpenSim的应用已经十分成熟,研究成果丰硕,而我国关于OpenSim的研究尚处于初步阶段。
1.2.2人体直立抗扰动研究现状
人体直立是指人体在神经信号的控制下,调动肌肉骨骼的主动控制,维持身体平衡。这个过程主要包括三个基本环节:感觉输入、中枢整合、运动控制。在人体受到扰动后,经过约40ms的延迟才会真正调动骨骼肌进行响应,这是因为神经信号的传导存在一定程度的延迟,之后踝关节附近肌肉被激活以调节平衡[6]。
最初对人体直立测试的研究采取观察法。1851年,Romberg[22]创立直接观察法开始了对人体直立测试的研究,让测试人员双脚并拢,分别在闭眼与睁眼时应对外来干扰,并观察受试者的反应状态。1966年,Gragbiel改进此方法,采取让测试人员两足前后分开的方式,观察其在闭眼与睁眼时应对干扰的倾倒情况。1989年,Katherine Berg开创了BBS量表法,主要是通过对人体不同姿态进行测试,用得到的数据对平衡能力加以评价,该方法得到国内外学者的广泛应用[6]。
1996年,Fitzpatrick等人对人体的本体觉和前庭神经系统施加干扰,通过此实验得出了测试者的反射增益,并对腿部肌肉的反射特性作了进一步的分析。实验结果显示,在应对外部扰动的过程中,人体视觉系统对回路增益并无影响,但是起到了前馈作用[6]。
在国内,2004年刘汉良等人采用BBS方法对40多名受试者进行了平台稳定测试,随后应用Berg表对人体平衡功能做出了评价,结果显示年龄因素对人体直立平衡能力有很大影响。2007年,刘波等人用海绵垫干扰本体觉的方法展开实验,100余人参与的实验结果表明,视觉、本体觉对保持人体直立有协同作用。并得出结论,人体的感受器官在维持人体直立平衡的时候是联合起作用,当一种调节系统被屏蔽时,其余调节系统的作用会显著上升,而调节系统之间的耦合作用远大于各调节系统的简单叠加[6]。
请支付后下载全文,论文总字数:29529字
相关图片展示: