通过在手机中嵌入加速度计 和使用kfd算法实现跌倒检测外文翻译资料
2022-08-31 17:12:27
英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
通过在手机中嵌入加速度计
和使用kfd算法实现跌倒检测
摘要:
跌倒是老年人日常生活中的一个危险事件,特别是独立生活的老人,常常在心理和生理上对他们造成严重伤害。基于可穿戴式传感器的跌倒检测系统已经在许多实验中验证了它的可行性和有效性,但仍有一些关键问题,包括:人们也许忘了穿上佩戴有微型传感器的衣服,该设备的标准应选择医疗器械标准与大众市场标准之间,如何控制虚警概率拟合来满足个性化需求。为了解决这些问题,我们认为结合微传感器与每天使用的设备,并通过远程调整分类参数服务器是一个合理的设计。他们有一个共同的网络接口。在本文中,我们嵌入一个三轴加速度计手机,通过无线通道连接到互联网,并使用1类SVM(支持向量机)的预算法处理,KFD(核Fisher判别)和k-NN(最近邻)精确分类算法。有32名志愿者,包括12名年龄在60-80岁和20名在20-39岁的人,参加了我们的实验,结果表明该方法能有效地检测出跌倒,比一般的可穿戴式传感器为基础的跌倒检测系统减少对于人们的日常生活中的干扰。
关键词:
加速度计、手机、跌倒检测,1类SVM,KFD
1.简介:
跌倒是老年人日常生活中一个非常危险的因素,特别是对于独立生活的老人而言,它经常引起严重的生理损伤,如出血,骨折,中枢神经系统损伤。如果急救处理不及时,这些伤害可能导致残疾,瘫痪,甚至死亡。在另一方面,跌倒也产生许多心理问题,如害怕运动,担心独立生活,等等。
为了有效和及时的发现跌倒,一些跌倒检测系统被开发出来并展示了它们良好的性能。当前的跌倒检测方法基本上可以分为三类:基于视频、基于声频和基于可穿戴式传感器的系统。基于视频的系统装置通过一个或多个摄像机捕捉人体的运动图像,然后通过某些图像特征的变化(如矩,纵横比)来确定是否有跌倒现象发生。基于声频的系统装置通过分析音频信号的下降来检测跌倒。一般来说,这种方法是不准确的,只被选定作为辅助方式的方法。基于穿戴式传感器的系统意思就是嵌入了微传感器的衣服(也包括腰带、帽子、鞋,饰等),来实时监控人类活动,通过一些运动参数的变化来检测跌倒。只要一个人穿上了这样的衣服,他将在任何地方都能被监控。
因为一个摄像机通常安装在固定位置,但人体是一个动态的对象,所以基于可穿戴传感器的系统相比于基于视频的系统更加适合于检测跌倒。
在家庭远程监护和远程康复方面,可穿戴技术被认为是在不久的将来最重要的技术之一,它的优势在于它的连续性、低成本以及使用简单。但对于跌倒检测系统,也有一些至关重要的问题,包括:(1)有的人也许忘记穿佩戴有微传感器的衣服。跌倒是一个意外的事件,它常常很久(几个月或几年)都不会出现,可穿戴设备将产生一些不安的感觉,虽然是很轻微的,所以随着时间的流逝,人们经常降低警惕,忘记穿这件特别的衣服或装置。(2)设备标准应为医疗器械的标准与质量之间的选择市场标准。如果设备是以医疗设备为标准制造,这将更可靠,但意味着更高的成本,如果以其他为标准虽然意味着可靠性的一些漏洞,但成本较低;(3)如何控制虚警概率满足个性化需求。这是一个难关:如果虚警概率降低,报警概率将增加,反之亦然。因为每个人都有个人的健康状况和生活环境,如果我们设置了一个恒定的假警报概率,这将导致对有些人(如有些平衡失调的人)而言,跌倒后未报警的概率增大,但更多的干扰其他人(如身体健康的老年人)。
为了处理这些问题,我们认为结合微传感器与具有通用网络接口的每日动态使用装置是一个合理的设计,通过软件冗余设计提高可靠性,通过远程服务器调整数据库中有关于用户的分类参数。因此,我们在手机中嵌入三轴加速度计,通过无线通道连接到互联网,在网络上设置2个服务器(一个主和一个储备)。
手机已成为日常使用的设备,聊天和短信的功能可以提醒其余的用户不会忘记这个装置。手机也给我们提供了一种通用的技术,一个连接到互联网的平台,让我们可以轻松调整设备参数和获取信息支持。但手机使用的是公共通信网络,这并不十分稳定,我们通过再发送和多点传输的方法来缓解这种短缺。
加速度计在我们的系统中的运动完全不同于一般的可穿戴式传感器系统,这给我们带来了一些复杂的计算,所以我们开发了一个二层次的算法,即采用一级支持向量机算法从输入中提取可疑的跌倒数据,然后通过精确的分类算法(核Fisher判别)和K近邻算法(最近邻)实现判别。
我们收集了大约1100个样本,共有32个志愿者,其中包括12个老年人(60-80岁)和20个年轻人(20—39岁)参加我们的实验,结果表明,我们的方法能有效地检测出跌倒,比一般的基于可穿戴式传感器的跌倒检测系统更能减少对人们日常生活的干扰。
2.方法:
2.1硬件和系统结构
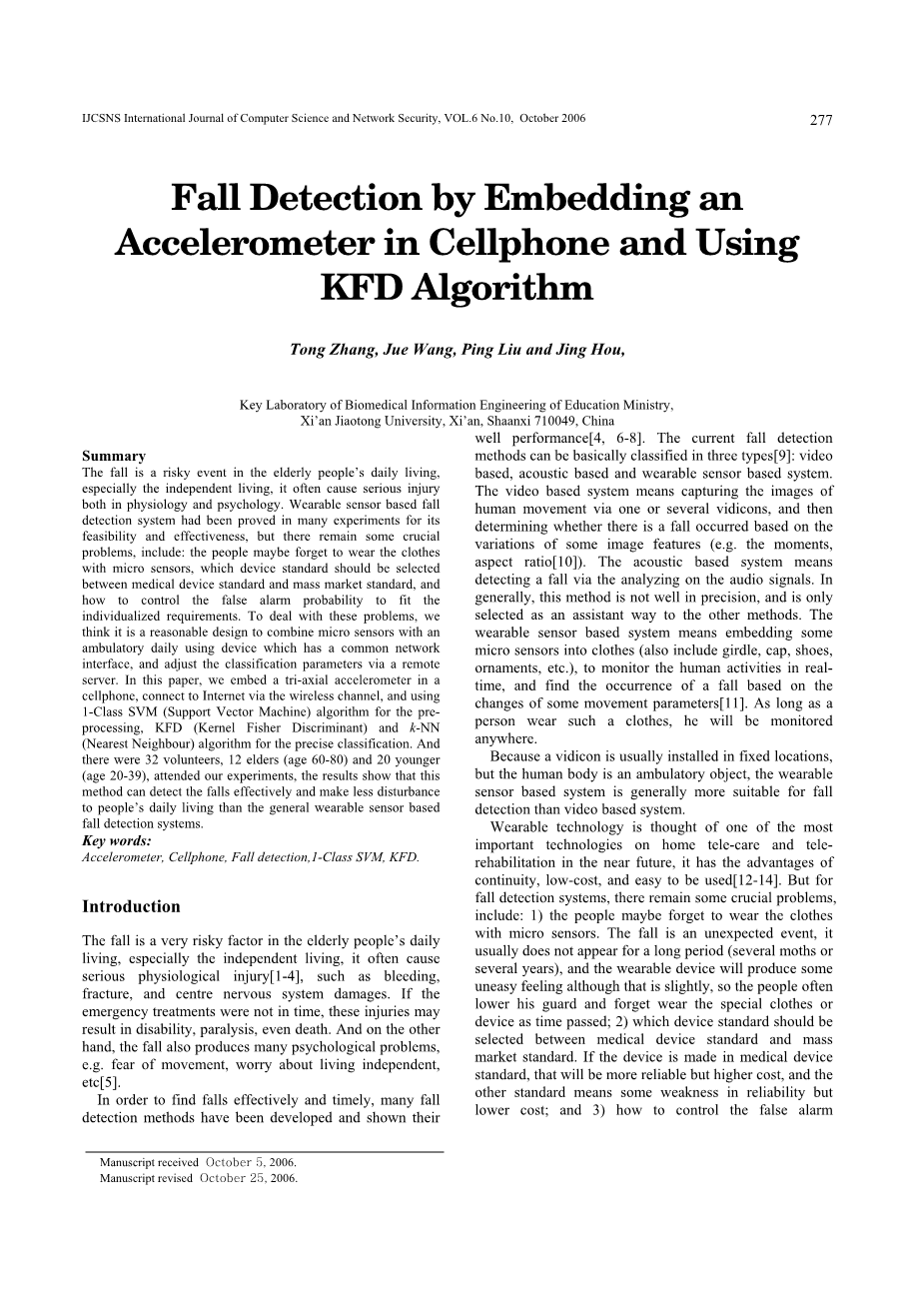
实验系统由2台计算机和一个带有箱贴的手机组成,如图1所示。这个计算机被用作远程服务器。在盒子里,电路包括三轴加速度计(助教),一个单一的芯片调制解调器,单片机(微控制器单元),还有一些外围元件。
“MMA7260Q”,由飞思卡尔半导体制造,是一种低g值微机械阻力体积为4times;4times;1mm的加速度计,单电源供应2.2v-3.6v,该传感器具有四个测量范围:1.5G、2G、4G、6G,我们选择6G。当电源电压为3.3V,典型的电流0.5mA,典型的灵敏度为800mV /g时。输出是三个相互垂直的加速度,ax、ay、az。当在静态时,ax、ay、az的向量和是重力加速度。在这里,样品率我们选择是每秒128点。
单芯片调制解调器,“MSM7512BRS”,由冲电气半导体创造,是1200bps半双工ITU-T V.23调制解调器。包装类型是dip16-p-300–2.54,电源电压范围为3V至5V。在典型运作模式时电力能耗是25MW,最大掉电模式时为0.1mW。
单片机“PIC18F2455”是一家微芯片技术公司的产品。该芯片的主要特点包括:24k字节闪存程序存储器、2048字节SRAM、256字节的EEPROM数据存储器、10位A/D转换器,8* 8单周期的硬件乘法器,和3.0-5.5v的功率供应。
图1 系统结构
电路和手机组成了一个跌倒探测器:将加速度信号通过A/D转换转换为数字信号,再用单片机进行分析。如果跌倒是确定的,单片机将发送一个UDP(用户数据报协议)到远程服务器无线信道。在这里,服务器1是主服务器,服务器2是备用服务器。跌倒探测器首先发送数据包到服务器1,如果失败,它将发送数据包到服务器2。而另一方面,单片机也可以接收来自任何一个的指令和数据服务器。
2.2软件
该软件包括单片机程序,服务器端程序和数据库。单片机包含ISR(中断服务程序)和一个主程序。ISR完成数据采集和A/D转换,并保持192times;3byte长度的“先进先出”序列,记录输入数据。在每一秒的末尾,ISR将记录数据输入缓冲区(inbuff)和设置一个标志程序通知主程序捕捉数据。如果主程序不能及时捕捉记录数据,输入缓冲区将更新。同时,ISR给出一个通信跨度,以避免过载的渠道。
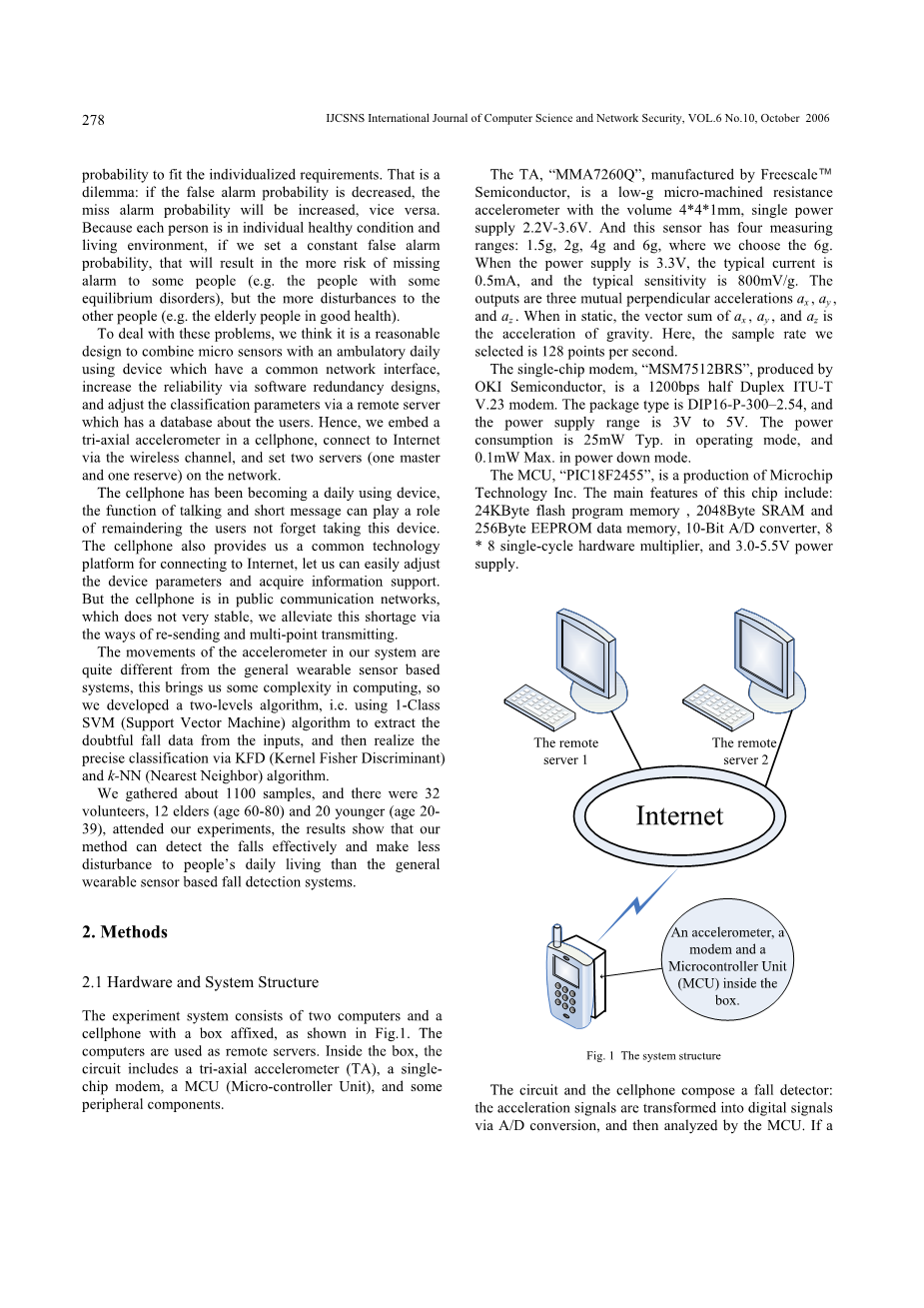
图2 单片机主程序的流程图
图2显示的是单片机主程序流程图。首先检查1_second标志,如果它是有效的,输入缓冲区的数据将被转移到一个计算缓冲区(calbuff),1_second标志清零,然后用低通滤波算法除去噪声。在下一步,用1级基于SVM算法来评估数据是否高概率近似于跌倒,然后通过KFD、K-NN算法对可疑数据进行分类。如果跌倒被缺人,单片机将UDP打包(基于IPv4格式),把它设置在输出缓冲区(outbuff),设置上传标志有效(SEND= 1)。当主程序发现SEND= = 1,它将发送UDP包至任一服务器。如果沟通成功,SEND将被清除。因此,一旦通信失败,SEND将仍然是1,UDP数据包将被发送重复(在这里我们设置了100倍的上限,并且传输跨度为15秒)。
服务器程序是java开发的,数据库是mysql3.1。程序的功能包括报警显示、参数管理、用户接口和数据库管理。双服务器运行相同的程序,但优先级是不同的,每个服务器有它自己的数据库,数据库是镜像。数据库的内容涉及到用户的个人信息和价值分类参数。基于这个数据库我们可以实现个人参数控制(特别是假警报的控制基于概率)。
因为UDP是不可靠的协议,所以在这里我们通过确认机制提高了可靠性,即一旦单片机收到了一个包,它会回复一个确认包到服务器,反之亦然。
2.4跌倒分析
在某些情况下,跌倒不会导致严重的后果,例如跌倒很快就重新站起来。我们称之为
非破坏性跌倒,并考虑它是否不必触发报警。我们称之为其他类型的跌倒为破坏性跌倒。在这里,“跌倒检测”意味着发现破坏性跌倒。
我们将a表示为标准的向量和电讯塔的输出,即a= | ax ay az|。总的来说,破坏性跌倒有三个步骤,依次为:日常活动,跌倒,一段不动(或只是一个小小的动作)。在第一步的加速度的变化是随机的,跌倒会导致加速,而且加速一般在0.4-0.8秒完成,并且不动的时间会持续几秒或a与重力加速度接近。所以我们首先发现,如果a接近| G |一段一秒,我们将视为静止期,然后我们回溯至1.5秒前的数据,并采取补分数据(192点)作为输入序列,然后我们进行一些分类算法,以确定是否真的存在跌倒的事件。
就目前的跌倒检测系统来看,这加速度计被绑定到人体(一般绑定到肢体上),传感器和人体之间存在着固定的角度关系,可以通过角度的变化检测到跌倒(如迅速从垂直到水平),或依靠一些基于低维的智能算法特点。但在我们的系统中,加速度计的运动比前者更为复杂例如,(1)拿着手机,转了手,(2)把电话扔到沙发上,(3)把电话迅速放到口袋里。在这些情况下,真正的跌倒与一些高强度人类日常活动之间的加速度变化往往是非常相似的。
因此,我们设计计算分为2个步骤:预处理和高级处理。对前者而言,基于一些低维特征,我们使用1类SVM算法提取可疑数据,对于后者,基于高维特征的分类,我们使用KFD K-NN算法实现精确。
2.5预处理
跌倒检测是一个二元决策问题。如果我们将跌倒数据表示为阳性样本,非跌倒数据表现为阴性样本,我们将面临这样的情况:阳性样本有很多共性,同时阴性样本是多样化的(或者我们可以说是随机的)。换句话说,很难捕捉到足够的训练分类器的阴性样本。在这种情况下,1—类SVM是一个不错的选择。1类SVM利用内核函数映射所有样本进入一个高维特征空间,然后搜索一个最小超球体然后在里面进化出所有的阳性样本,并使用一组松弛变量来实现超球面的半径和外球面的样本数量之间的权衡。该算法确定主要是基于决策界面的阳性样本集,阴性样本数可以少。
我们开发了一个1类SVM算法,它的特征空间是六维的,结果表明它对于区分跌倒与强度较低的日常活动效果非常好,但是对于区分强度较高的日常活动比较弱。所以我们用会议里的方法作为预处理,以从每日运动加速度序列数据中提取可疑数据。这里输入的是192点序列,在2.4节中已经介绍,我们调整松弛变量以确保99%的真正跌倒样本可以被分到可疑数据集中。
2.6核函数判别
经过预处理后,利用KFD算法实现对于可疑数据最优的可分性Fisher判别变换的分类。Fisher判别通过一组投影操作从高维空间变换到低维特征空间。投影结果有最佳可分性。对于二分法的问题,在线性的情况下,可以通过最大限度地提高瑞利系数来解决这个问题:
在这里w是线性变换,Sb是类之间方差,Sw是组内方差。
这里mk是k类样本均值,Ik是设置为k类的指数,而且Ik是在k类载体的指示数。
在非线性的情况下,这个问题被映射到一个内核特征空间,而且Fisher判别成为KFD,即通过定位phi;K:
方程(1)中的项分别变成了和
这里,Ik意味着如果元素属于Ik,则值是1,否则是0。
测试的投影输入x将是
可以通过求解一个系数向量的向量来确定等价凸二次规划问题。在这里我们选择RBF(径向基函数)为核心功能。
sigma;值通过搜索确定,首先,我们在对数空间中实现搜索,即让把闭区间划分为8个相等的部分,在每个部分中选择最小值进行修正,选择最佳的部分表示为跨度1。然后我们在线性空间中进行精细搜索,即变换1大跨度为线性空间把跨度2分成32个相等的部分,也选择最小的值,在每一个部分修正和保留最佳
2.7分类与假警报概率的控制
进行KFD投影操作后,我们用k-NN实现分类的算法。为输入测试向量,决策函数为:
其中第一类omega;1表示跌倒的样本,第二类omega;2表示非跌倒样本,K是最近邻的数量。K1、k2分别代表属于omega;1,omega;2的最近邻的数量。n1、n2表示属于omega;1,omega;2的样本的数量。
、分别是在特征空间的omega;1、omega;2类方差。而pc是一个用于控制虚警概率的系数,其价值直接与虚警概率比例有关。个性化的数据存储在数据库中,可以传输到单片机,这样我们就可以实现个性化的虚警概率控制。
k的价值也取决于搜索,在那里我们让Kisin;{ 11,13,51,hellip;},然后检查每个向量在每个k的训练集,并选择最佳的。
3.结果
<p
剩余内容已隐藏,支付完成后下载完整资料</p
资料编号:[147761],资料为PDF文档或Word文档,PDF文档可免费转换为Word



