外电刺激耦合混沌神经元的自适应同步控制∗外文翻译资料
2022-09-23 16:54:52

英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
外电刺激耦合混沌神经元的自适应同步控制lowast;
于海涛 , 王江 , 邓斌 , 魏熙乐 , 陈颖源
天津大学电气工程与自动化学院,天津300072
(2012年9月26日收到初稿; 2012年11月4日收到修订稿)
在本文中,我们提出了一个两间隙连接耦合混沌-–Nagumo同步控制算法(FHN)在外部电刺激神经元。该控制器包括一个组合的动态性滑模控制和自适应反演控制。该算法产生的自适应动态滑模控制律具有静态滑模控制器的抖振,即优势,产生一个更有效的平滑控制输入信号。它表明,该控制方案不仅可以补偿系统的不确定性,但也保证了同步误差系统的稳定性。此外,还进行了数值模拟,以证明所提出的自适应控制器的有效性。
关键词: 菲茨休–Nagumo神经元,同步,自适应控制
代 码: : 87.19.lm 数字对象唯一标识符: 10.1088/1674-1056/22/5/058701
- 介绍
同步过程在自然界中普遍存在,在生物、生态学、社会学、技术等许多领域都有着重要的作用。[1] 最近,越来越多的证据表明,同步是特别相关的各种神经元的现象。[2] 在许多生物实验和数值模拟的经典现象,如相互同步,夹带,和混沌同步已被观察到。[3–5] 实验观察表明,同步神经元振荡与许多生理机制的正常和病理的大脑功能符合。例如,同步在不同脑区内在信息机制的信息处理和信息前言起着至关重要的作用。[6] 此外,在感觉运动皮层同步振荡为电机控制所需的信息整合和协调。[7] 另一方面,单个神经元的异常同步可能在某些病理情况下出现重新分布,如癫痫、原发性震颤与帕金森病。[8–10]
混沌系统的同步控制研究成为一个越来越大的课题。[11–15] 它已被证明,在一个神经元系统中的同步可能会受到许多因素的影响。没有控制,只有当耦合强度超过某一临界值时,相同的耦合神经元才能进行同步,[16,17]并且可能超出生理状态。在生物实验中,可以通过一个外部直流电流来实现两个耦合神经元的同步。[4]从理论上讲,已经开发了许多控制方法,以实现同步的神经系统,如自适应控制,[18,19]反推控制,[20]非线性控制,[21]反馈控制。[22,23]
在以往的文献中,[20]我们研究了同步两个混沌化控制电耦合FitzHugh-Nagumo(FHN)通过反推法在外电刺激的神经元。[24] FHN模型是神经动力学的霍奇金–赫胥黎模型的简化版本,但捕捉生物神经元的主要动力学特征。[25] 使用外部电刺激,在个体FHN神经元可能会出现混乱的行为。反推方案只需要一个控制器来同步耦合神经元,可以应用于各种混乱的神经系统,无论它们是否包含外部激励。然而,它不考虑在实践中的不确定因素。在复杂的神经系统中,有很多不确定的来源。最重要的是神经元之间的耦合强度,这通常是未知的,在实际的神经系统,但其同步行为有显着的影响。[17]
在本文中,自适应反推动态滑动模式控制器,它结合了动态滑模控制和自适应控制的优点,实现两耦合FHN神经元的一个不确定的耦合强度的混沌同步。首先,我们推导出一个简单的静态自适应滑模控制器,通过反推。然而,控制输入信号表现出明显的“砰”的行为,这可能被认为是在一个神经系统的反作用。然后,自适应动态滑模控制器将被提出作为获得更平滑的控制响应的装置。在该控制方案中,所有的抖振是完全降级的状态空间的动态反馈控制器。作为结果,
lowast;项目由中国国家自然科学基金(批准号:61072012,61104032,61172009)和中国国家自然科学基金青年科学基金(批准号:60901035和50907044)。
通讯作者。电子邮件:jiangwang@tju.edu.cn
copy;2013中国物理学会和IOP出版有限公司 http://iopscience.iop.org/cpb http://cpb.iphy.ac.cn
产生了足够平滑的控制输入信号。[26]此外,反推技术提供了一个足够简单的方式来获得一个更直接的滑动表面适应过程,同时避免了过度限制的自适应滑动表面的稳定功能。[26–28] 基于Lyapunov稳定性理论,提出了自适应动态滑模控制方案不仅能够补偿系统的不确定性,也保证了同步误差系统的稳定性。本文的其余部分组成如下。在第2节中,进行两个混沌FHN神经元电耦合与外界电刺激缝隙连接的动态行为的研究。在3节中,鲁棒控制方案结合自适应反推式控制方法方法和动态滑模控制技术设计同步两耦合FHN神经元。仿真结果也可以验证所提供的控制方法的有效性。最后,在第4节得出结论。
- 两个FHN神经元的电连接,缝隙连接的动态行为
在一个神经元系统中,神经元之间的耦合可能会发生通过2种不同类型的突触,即电气和化学的。在前一种情况下,耦合是通过间隙连接及其强度线性依赖于膜电位的差异。[29,30]在我们以前的研究中,[16]对间隙耦合神经元模型,和缝隙连接在两耦合FHN神经元同步的影响。模型的电路图如图1所示。
图1。耦合神经元的电路图。V1和V2表示对于两个耦合神经元膜电位;F(V),LM,和厘米是
神经元的电参数,g是神经元之间耦合强度;I0是外部电刺激。
下面是加上两个FHN神经元缝隙连接模型的描述:
X˙1 = X1 (X1 minus; 1)(1 minus; rX1 ) minus; Y1 minus; g(X1 minus; X2 ) I,
Y˙1 = bX1 ,
X˙2 = X2 (X2 minus; 1)(1 minus; rX2 ) minus; Y2 minus; g(X2 minus; X1 ) I,
Y˙2 = bX2 , (1)
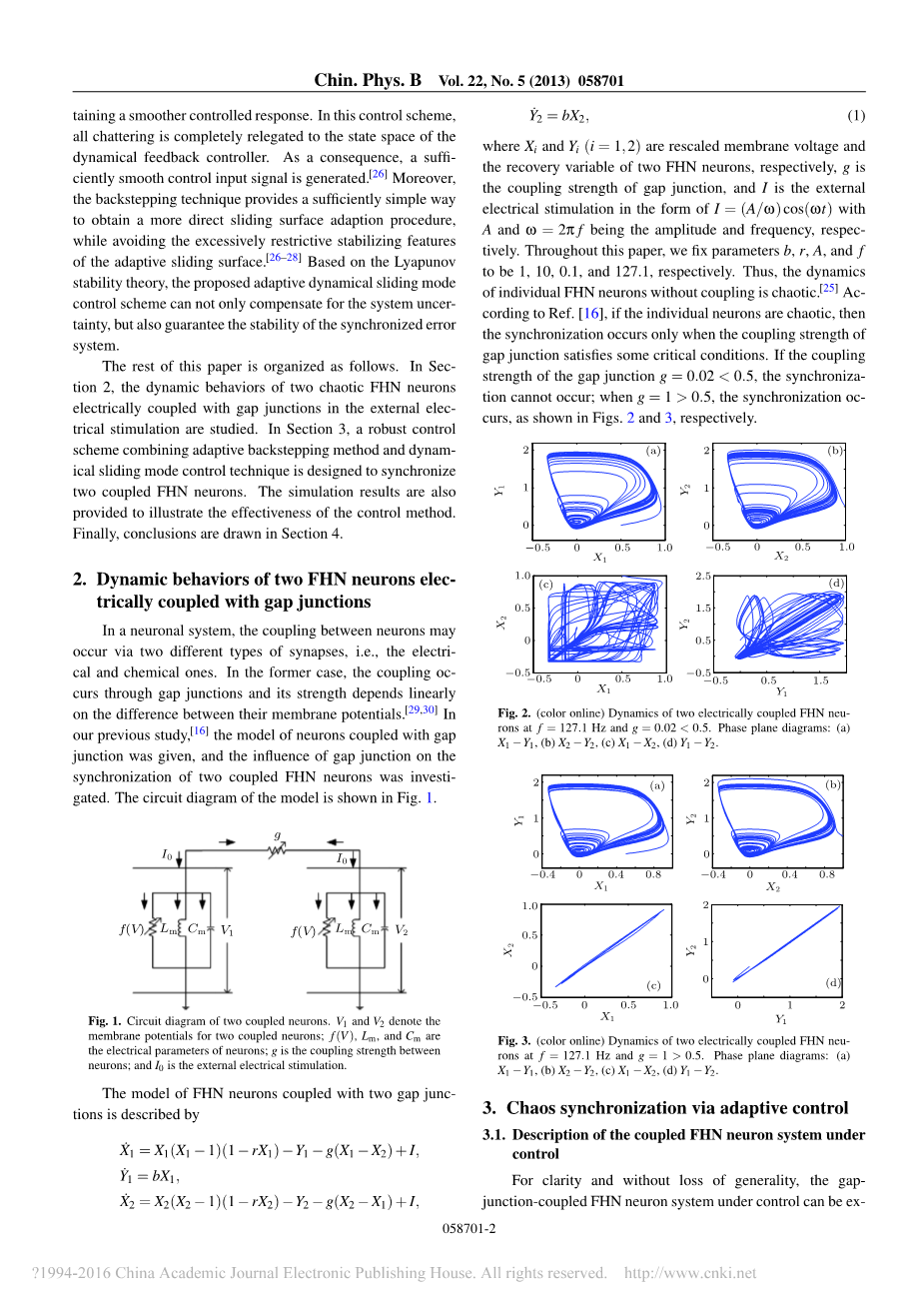
其中xi和yi(i = 1,2)重新调整膜电压和两个FHN神经元恢复变量。分别的,g是间隙连接的耦合强度,I是形式为I = (A/omega; ) cos(omega;t) A 和omega; = 2pi; f的振幅和频率的外部电刺激,在本文中,我们解决了参数 b, r, A,和f分别为1,10,0.1,和127.1。因此,没有耦合的单独的FHN神经元动力学是混乱的。[25]根据参考文献,[16]如果单个神经元是混沌的,那么只有当间隙连接的耦合强度满足某些临界条件时才发生同步。如果间隙连接g=0.02<0.5的耦合强度的同步不能发生;当g = 1 gt; 0.5,同步发生,分别如下图2和3。
图2。(颜色在线)动力学两电耦合FHN神经在f = 127.1赫兹和g = 0.02 lt; 0.5。相平面图:
(a)X1minus;Y1 , (b) X2minus;Y2 , (c) X1minus;X2 , (d) Y1minus;Y2
图3。(颜色在线)动力学两电耦合FHN神经在f = 127.1赫兹和g = 1 gt; 0.5。相平面图:
(a)X1minus;Y1 , (b) X2minus;Y2 , (c) X1minus;X2 , (d) Y1minus;Y2
3. 自适应控制混沌同步
3.1. 控制FitzHugh-Nagumo神经元耦合系统的描述
清晰且不失一般性,间隙连接耦合FitzHugh-Nagumo神经元系统的控制下,可以表示为:
X˙1 = X1 (X1 minus; 1)(1 minus; rX1 ) minus; Y1 minus; g(X1 minus; X2 ) I,
Y˙1 = bX1 ,
X˙2 = X2 (X2 minus; 1)(1 minus; rX2 ) minus; Y2 minus; g(X2 minus; X1 ) I u,
Y˙2 = bX2 , (2)
其中G是一个未知的常数,U是添加的控制力量使得两耦合FHN神经元的动力学行为是同步的。
让eX = X2 minus; X1 和 eY = Y2 minus;Y1 ,耦合神经元的误差动态系统可以写成如下:
e˙X = [X2 (X2 minus; 1)(1 minus; rX2 ) minus; Y2 minus; g(X2 minus; X1 )]
minus; [X1 (X1 minus; 1)(1 minus; rX1 ) minus; Y1 minus; g(X1 minus; X2 )] u,
e˙Y = b(X2 minus; X1 ). (3)
我们可以重写误差控制系统(3)如下:
F (x) = X2 (X2 minus; 1)(1 minus; rX2 ) minus; X1 (X1 minus; 1)(1 minus; rX1 )是误差动力学x = [X1 , X2 ]T 非线性的一部分。
这样,在耦合神经元同步的问题可以转化为一个问题,如何实现在原点的系统(4)是渐近稳定的。我们的目标是设计一个自适应反推式控制的系统 X2(2)跟踪参考轨迹X1渐近的自变量动态滑模控制器,使得lim (t) = 0。
t →infin;
3.2. 自适应动态滑模控制器设计
在本节中,我们旨在为耦合混沌FHN神经元的同步设计无抖振控制方案。为了进行比较,首先设计了一个静态自适应滑模控制器,以显示控制输入信号的“砰”的行为。然后,我们提出了一种自适应动态滑模控制系统,以消除的“砰”的控制输入i和e的性质,一个足够平滑的控制输入信号就得到了。
3.2.1. 静态自适应滑模控制
考虑下面的动态误差系统:
e˙X = minus;2geX minus; eY <!-- 剩余内容已隐藏,支付完成后下载完整资料
资料编号:[148087],资料为PDF文档或Word文档,PDF文档可免费转换为Word



