面向智能驾驶的信号相似性比对方法研究毕业论文
2020-03-20 23:47:32
摘 要
道路标志的良好识别是实现无人安全驾驶的首要保证。城市道路标识识别的主要分为三个方面,得到图像、检测图像和图像的识别。为了消除掉图片捕捉时可能产生的多种扰动或噪声,信号识别之前先对要识别比对的图片进行了预处理,包括灰度化、二值化并进行开闭运算降噪。当图片使用了开运算的手法对图像进行降噪,降噪结果符合要求。需要把图片的信息变得更加的简介,信息尽量少才能够满足检测的要求。为了达到这个目的,设计中将图像二值化,通过各种方法数次对比发现最大类间方差二值化方法的效果是最适合的。实验是通过交通指示标识分析的形状分析进而特征提取,即提取导向识别用模板的不变距特征作为数据处理的依据。在不变距特征的提取中,本篇文章分析了胡氏不变矩,为路面交通标识的信号比对和识别提供良好的算法。似性比对是通过直方图比对、欧氏距离、余弦相似性和相关系数这五种方法来实现的,目的是探求适应各种对象的相似性比对手段。
关键词:开运算;Hu矩;相似度;交通标线识别
Abstract
The good recognition of road signs is the primary guarantee for unattended driving.The identification of urban road signs is mainly divided into three aspects, which are the recognition of images, detection images and images.In order to eliminate a variety of di-sturbances or noises that may occur during the image capture, before the signal recognit-ion, the images to be identified and compared are preprocessed, including graying, bina-rzation, and opening and closing operations to reduce noise.When the picture uses the open operation method to denoise the image, the noise reduction result meets the requirements.Need to make the information of the picture more introductory, the information as little as possible can meet the requirement of the test.In order to achieve this goal, the image is binarized in the design, and it is most suitable to find the effect of the largest inter-class variance binarization method by comparing various methods several times.The experiment is based on the shape analysis of the traffic indication identification analysis and then the feature extraction. That is, the constant distance feature of the template used for guiding recognition is extracted as the basis for data processing.In the extraction of constant-distance features, this paper analyzes Hu's invariant moments and provides a good algorithm for signal comparison and recognition of road traffic signs.Similarity comparisons are achieved through five methods: histogram comparison, Euclidean dista-nce, cosine similarity, and correlation coefficient. The purpose is to search for similarity matching methods of various objects.
Keywords: open operation; Hu moment; similarity; traffic marking recognition
目录
第1章 绪论 1
1.1 研究背景及意义 1
1.2国内外现状 2
1.3 本论文的组织结构和行文安排 3
第2章 图像预处理 4
2.1 图像灰度化 4
2.2 图像的二值化 5
2.3 图像降噪 7
第3章 图像特征识别与提取 10
3.1 图像的形状特征 11
3.2 图形的不变矩特征 13
第4章 相似度计算 15
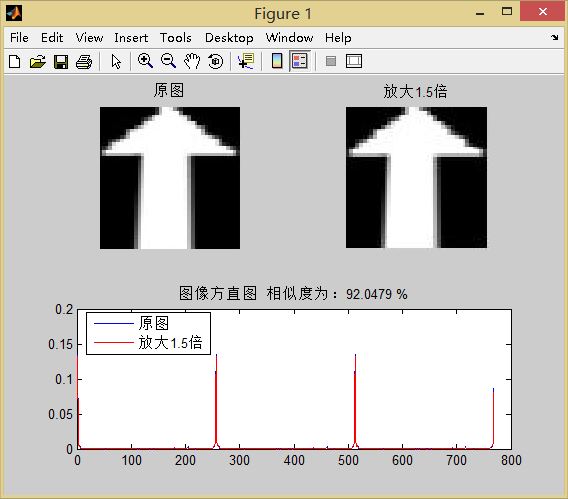
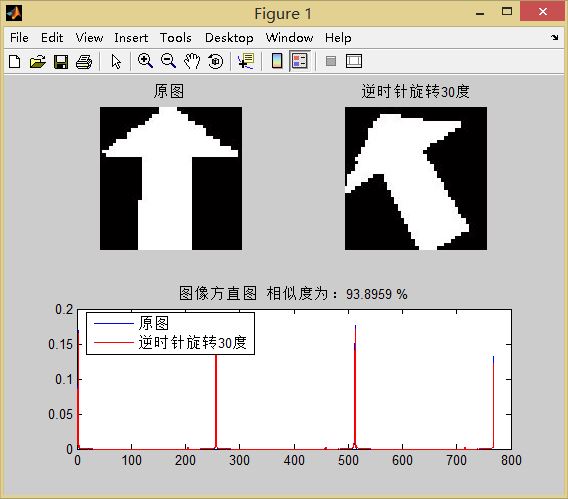
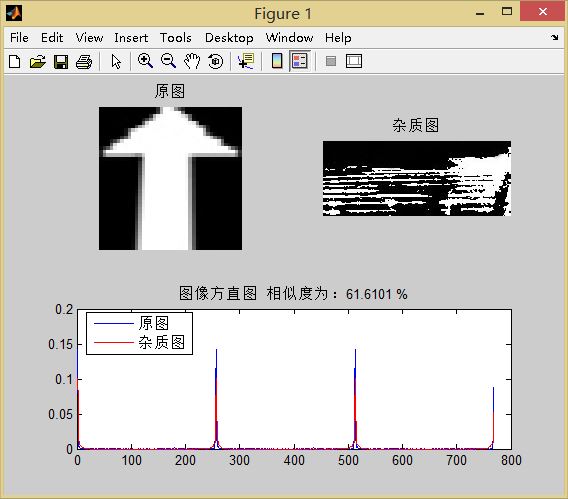
4.1 直方图 15
4.2 欧式距离 17
4.2 余弦相似度 18
4.3 corrcoef函数 19
4.4 相似度比对结果 19
第5章 总结 26
参考文献 27
致 谢 28
第1章 绪论
1.1 研究背景及意义
本次实验将使用MATLAB对图像进行处理和运算。MATLAB是20世纪80年代由Cleve Moler博士构思开发出来的,起因是因为他认为高级语言编程解决T程计算问题很不方便。MATLAB以矩阵作为它的计算基础,把计算、程序设计、可视化融合于一身。同时,为帮助科学研究,还推出了一系列支持处理图像的操作函数,如变换、图像分割、几何操作、滤波、图像边缘提取、区域操作、图像增强等,这些让图像处理变得简单易行又直观易懂,所以MATLAB完全满足本次设计需要。
世界高速发展和人口的暴增使得汽车已经完全融入到人们的平常生活中,随之而来的是道路也日益拥堵。有过驾车经验的人都知道驾驶汽车是一项复杂而枯燥的活动。尤其是一些工程作业环境中的特种车辆的工作条件恶劣而且劳动强度十分大,作业时间长必然使人劳累,进而极易引发交通事故,所以这种车辆十分有必要实现智能驾驶无人驾驶。智能驾驶是人工智能有望最早用于生产生活的一项应用,智能化已经成为社会趋势。
在汽车的发展过程中我们可以知道,车的控制者一直都是人,车辆在进化改进的过程中一直提出的是提高人的驾驶体验,而对于可控的机器与适当的环境来说,人,显然成为了一个不稳定的因素。人靠着自身的意志、身体的掌控和社会的制约来实现安全驾驶,但任然达不到提高道路交通效率这一点。车的数量日益增多,城市交通问题越来越严重,所以应该着手于去除人这个不稳定因素,将智能驾驶于大数据相结合,用计算机代替一个个独立的智慧个体进行统筹计算管理,形成一个只包含车和道路的交通系统,这样下来,即将人从繁重乏味的劳动中解救出,又简化交通提高交通效率降低交通成本保障交通安全性,让城市变得更有活力。
目标识别是基于传统特征的智能驾驶最关键性的任务,它包含了非机动车的识别、行人的识别、车道线的检测、车辆类型的识别、交通标志的识别、车辆的识别、障碍物的识别与避让等诸多项识别。它的主要实现方法有提取有三个:1.梯度直方图特征(HOG);2.尺度不变特征变换特征(SIFF);3.颜色自相似特征(CSS)。所以特征的检测是最重要的,它直接影响了编写的程序会如何对图像的信息进行阐述,能够提取出能适应很多种干扰影响的理想的特征才是优良的算法。
面向智能驾驶的信号相似性比对方法将成为智能汽车无人驾驶的一种措施,路面交通标线辨认研究为的是无人驾驶汽车可以在复杂的现实道路交通中能够自动安全有序遵守交通规则的驾驶,可以设想,通过识别信号车辆能够自主在公路行驶时能够行驶在车道线内,假果遇到转弯标识,它能够预先变更车道,遵守交通规则维护路面秩序,防止出现交通事故。
在未来,人类必然能够实现智能汽车完全自主的无人驾驶。所以,尽管本课题研究的内容仅仅是自动驾驶领域的一个小分支,然而对将来社会发展添砖加瓦的这份意义是重大的,面向智能驾驶的信号相似性比对是非常重要非常有必要的。
眼睛是人类的接受外界信息的窗口,它承载着观察事物和认识事物的重要任务,外界信息超过四分之三都是由眼睛接收的,而对于驾驶员来说眼睛更是重中之重。在当前的智能驾驶辅助系统中机器视觉会接受到比其他手段如激光雷达或超声波测量更多更丰富的信息,这对分析一个复杂的路面系统是十分必要且有帮助的。
不论是单目或双目相机,亦或是多目或深度相机,不论捕捉到的的图像有多么清晰的像素、多么高的采样速率,也无法完全搞定图像采集和处理时面临的问题。所以目前实践仍受到制约。
1.2国内外现状
近几年,现代化技术的长足发展的背景下,老牌车企通过与人工智能技术的结合在无人驾驶技术方面的研究取得了迅猛发展,同时汽车制造业内很多大型企业都在这个智能汽车方向投入巨资进行研究,外国的Google、Toyota,中国的Baidu、BYD等企业都开发了智能汽车,而且成果令人十分满意。
自二十世纪中叶以来,美英德法等国家掀起了研究车辆智能驾驶的热潮,从以下事迹我们不难看出他们在理论与实际方面都取得了优异的进展:二十世纪七十年代,某些汽车制造商使用射频和磁钉来引导车辆自动寻径;在2007年,将城市道路作为美国的国防高等研究计划署城市挑战赛的比赛项目,具有非常高的难度系数,然而 卡内基梅隆大学和斯坦福大学还是全部都以优异的成绩完成挑战;2015 年6月26日,Google无人驾驶车开始在美国的城市道路上进行测试;2016年,有联合国官员透露有关世界车辆行业推进研就的无人驾驶系统将由制定汽车国际规则的联合国机构制定其安全法规,同时间,英国有关部门通告:允许智能汽车在英国首都街头进行测试;同年二月份Google被告知根据美国联邦法律可以视智能汽车为“司机”,这是智能驾驶在全球范围内取得的重要进步。
中国研究智能驾驶技术的脚步要慢于西方的几个发达国家,开端是二十世纪八十年代,1992年中国拥有了第一辆真正意义上的无人驾驶汽车,它是由国防科技大学研发制造;进入新世纪,我国成功研制了城市无人驾驶汽车;2011年,由一汽集团与国防科技大学共同研制的无人驾驶汽车完成了286 公里的高速全程无人驾驶试验并在其全程几乎无人工干预;2016年,百度公司正式向外宣称成立自动驾驶事业部,预计三年实现智能驾驶汽车的市场化,并在五年达到批量生产。其他国家汽车企业通过自主研发为主要手段,而中国车企大都通过与大学、科研机构合作研发智能驾驶技术,其中已经着手相关研究的公司有北汽、奇瑞、一汽、上汽、长安等。在这之中长安汽车公布智能化汽车“654”战略,旨在掌握无人驾驶技术,为此长安汽车计划到 2025 年建立起一千五百人的研究队伍,累计投资上百亿元来提高智能驾驶等现代化汽车技术水平。
1.3 本论文的组织结构和行文安排
整篇论文分为五章,主要是研究面向智能驾驶的相似度比对方法。
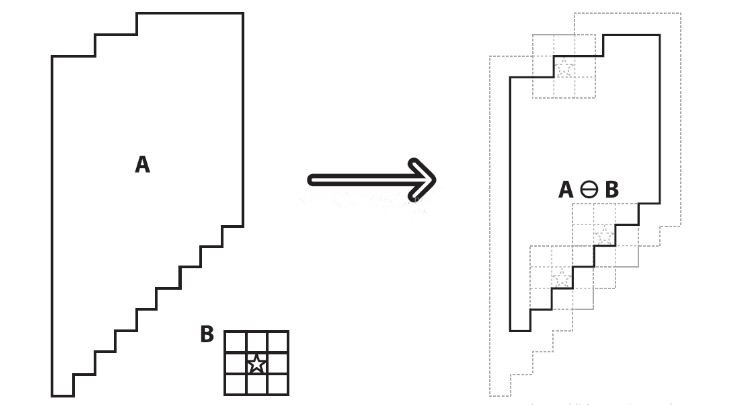
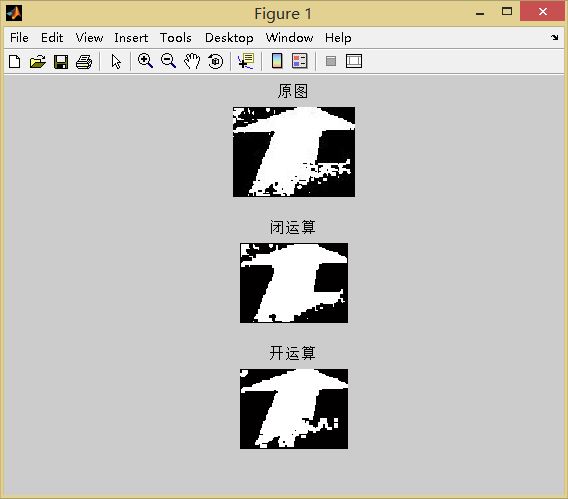
第一章综述了论文研究的背景及意义,介绍了现有的技术手段和其发展现状,细致地剖析了国内外研究无人驾驶汽车的现状以及意义,并指出研究上将面临的些许问题。探求城市交通标志识别的方法对实现无人驾驶汽车的发展是十分关键的。面向智能驾驶的相似度比对技术主要包括了:交通标志图的预处理技术、特征提取技术以及相似度计算。第二章研究了图像预处理的步骤与具体方法。第一,图像灰度化。灰度化可以实现改善图片质量,增强图片的对比度,使图片可以显示更多的细节,并有目的的突出图片有用的特征或者抑制图片中不感兴趣的特征,同时改变图像的直方图分布也十分有效,使像素的分布更为均匀。第二,图像二值化。方便在MATLAB中对图像矩进行更多处理。第三,图像降噪。在现实场景中,路面交通标志经常会受到各种干扰,例如标志残缺、光线不足等,为此本文运用了开运算进行去噪,通过进行高于其邻近点的孤立点的消除、小团块物体的排除(较背景明亮)、删除无法包含结构元素的对象区域、平滑对象的轮廓、断开狭窄的连接、去掉突出的细小部分来改善图片质量。为进行下一步提供良好的基础。第三章研究了图像特征的识别与提取。在图像特征提取中,提取了图像的Hu不变距特征详,细分析胡氏不变矩的计算方法,推倒它的计算过程并在matlab软件中编写程序将算法实现。第四章研究了相似度的计算方法。相似度计算时,实验采用多种方法进行对比实验,其中包括直方图比对法、相关系数、欧氏距离和余弦相似度。第五章对本次方案设计的实验流程进行分析,对本次设计进行总结和反思,对未来进行展望。
第2章 图像预处理
通过计算机运算处理得到图像信息的技术被叫做数字图像处理。该方法准确、重现性好。通过该程序易于控制和自由设定和改变各种控制参数。灵活性,根据现有的程序根据实际需要进行改变,可以实现各种处理,也可以结合已有的算法和程序,并开发出自己的新系统。但其难点在于图像数据量大,计算量大。
在图像识别中,图像的质量直接影响识别算法的设计和效果的准确性。除了优化算法外,预处理技术在整个工程中占有非常重要的地位,但人们往往忽略了这一点。
图像预处理是分离每个图像并将其识别到识别模块。这个过程被称为图像预处理。它是在图片进行分析、匹配或提取特征前实施的操作。
通过除去图像中无关信息,恢复我们感兴趣的信息,使相关信息的可检测性增强,在最大程度上简化图片数据,来改变特征提取和图片分割是图像预处理的主要目。匹配和识别的可靠性。在预处理过程中,有许多步骤,其中最主要的是数字化和几何变换,而归一化、平滑、恢复和增强等操作也是基本且经常被使用的。
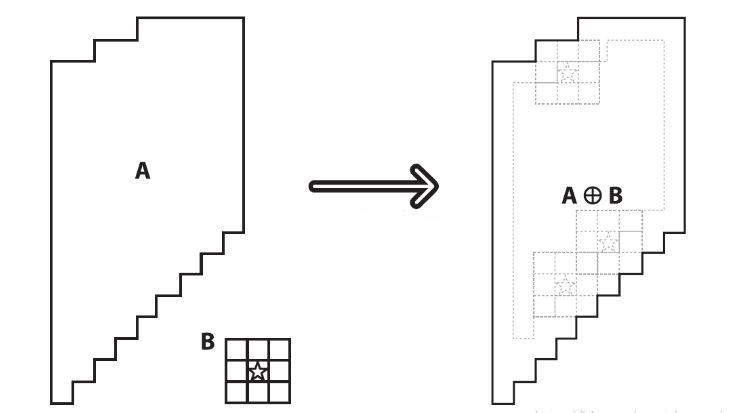
在采集图像时必然会因为存在各种不可控干扰因素使得收集到的图像含有噪声造成图像质量下降,从而使后续工作面临极大困难。因此图像预处理来降低图像复杂度显得尤为重要。图像预处理的目的是增强目标,保留感兴趣信息去除掉无用信息。本次实验将涉及图像预处理的3个步骤:图像灰度化处理,图像降噪,二值化处理。图像转换为灰度图使其更直观,目标更明显,更易于分辨与操作。而图片降噪能够使目标脱颖而出,让接下来的操作可以准确地找到目标并对其进行操作。
2.1 图像灰度化
视觉传感器捕捉的图像通通是彩色的图片,根据之前所分析的,对彩色图片进行灰度化处理,这样才能对路面表示进行检测。图像灰度化处理之后会大大减少图片的信息,这样既方便计算又节省资源,两全其美。在灰色数字图像的数值区间为0-255,也就是说,灰度图像中含有256个灰度级。规定黑色的灰度值是0,白色的代表灰度值是255。其余的黑色到白色之间灰度级别在1-254表示。
图像灰度变换具有以下功能:1。提高图像的质量,使图像能够显示更多细节。提高图像的对比度(对比度拉伸)2.有选择的突出图像感兴趣的特征或者抑制图像中不需要的特征3.可以有效的改变图像的直方图分布,使像素的分布更为均匀。
灰度化程序:
clear all %清除工作空间的所有变量,函数,和MEX文件
clc
close all %关闭所有的Figure窗口
f=imread ('2298.jpg'); %读取参数图片,得到矩阵/数组
f1=rgb2gray(f); %灰度化处理
subplot(211),imshow(f);title('原图')
subplot(212),imshow(f1);title('灰度图')
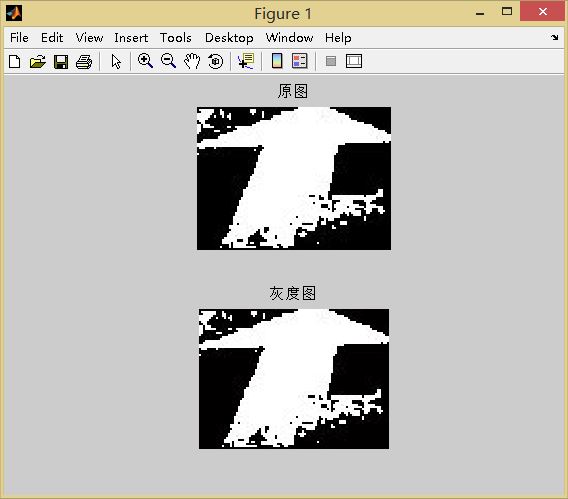
图2.1 灰度图
2.2 图像的二值化
将图像二值化的意思就是使图像中的像素点只呈现出两种灰度级,0或255。也就是说,图像上的颜色非黑即白。选取适当的阈值就可得到能够整体或局部特征的二值图像。因为MATLAB是基于矩阵进行计算的软件所以图像二值化在图像处理中是一项十分关键的步骤,很多操作都建立在获取二值化图像的基础之上。为了对二值图像进行处理和分析,首先需要灰度图像对这两个值进行赋值,得到二值图像,从而有利于图像的绘制。此时图像特性仅与像素值0或255的位置有关,不再涉及多个像素使得处理变得简单。所有大于或等于阈值的灰度级的像素被确定为属于灰度值为255的特定对象,否则将像素从对象区域中排除,灰度值为0,表示背景或异常对象区域。当实验目标具有均匀的灰度值时便使用阈值法进行处理。可当目标与背景之间差异不明显时可以将差分特征转换为灰度级的差异,然后通过阈值选择技术分割图像。
图像灰度化以后得到的256个灰度级图像含有过多信息,会导致计算量过大不能够直接拿来使用,在对它进行操作之前须先进行二值化处理,这样才能提高效率,提升运算速度。进行二值化处理方法有很多,规律是越准确的计算方法计算量便越庞大。
二值化计算过程中根据阈值选取的不同可以分成两种:全局和局部。可以从词的组成角度去理解,全局方法利用整张图来确定阈值,局部方法则对每部分子图来各自确定阈值。这当中全局方法包括两种依赖方法:点依赖和区域依赖。前一个可以分为最大类间方差法、最大熵方法、最小误差法,它们依赖的是各个像素点的灰度值。后一个则可以分为共生矩阵方法、灰度分布统计法、概率松弛法等。
方法1:将阈值设为0.5。即灰度图的每个像素以127为界,小于它的像素的值被置为0(black)而大于它的像素的值被置为255(white)。这个方法的优缺点都很明显,缺点是这种算法不考虑图像的像素分布和像素值特性,优点是需要进行的计算少从而缩短了计算时间。
方法2:计算出图片的像素平均值K再使灰度图的每个像素以K为界,小于它的像素的值被置为0(black)而大于它的像素的值被置为255(white)。这种方法是最经常被人们使用的灰度图二值化处理手段。但它的缺点同样明显,使用这种方法会使目标或背景的像素值丢失从而无法正确的提取出图片的关键信息。
方法3:日本学者Da Jin 1979提出的最大类间方差法。它是一种基于全局二值算法的自适应阈值确定方法,也称为OTSU。根据图像的灰度特征,将其分为前景和背景两部分。当取最佳阈值时,两个部分之间的差异应该最大,OTSU算法中使用的度量差的标准是更常见的最大类间方差。前景和背景之间的类间方差越大,就可以判断图像的两个部分之间的差异越大。当目标被误认为背景或背景部分被分割为目标时,两部分之间的差异将会减小。当阈值的分割使得类间方差最大时,这将意味着最小的错误概率。
如果图像的背景是暗的,并且图像的大小被记录为N1,则图像中的像素的数目小于阈值,并且大于阈值的像素的数目被记录为N2。则有:
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: