智能泊车轨迹规划与运动控制系统毕业论文
2020-04-11 17:51:38
摘 要
随着时代的发展,人们对身边事物的自动化要求越来越高,其中车辆也不例外,其中智能泊车系统更是人们热切希望实现的,操作性和智能性决定了泊车系统的未来。
本设计是由多个模块与所选微控制器的最小系统交互,从而实现自动控制整个停车系统。蓝牙模块、指南针模块和超声波模块主要将车辆位置信息发送到单片机的最小系统,声光避障模块与超声波模块相配合负责确定汽车的信息。电机驱动模块和舵模块负责接收单片机最小系统的数据来控制车辆。
关键词:上位机;单片机最小系统;自动泊车
Abstract
With the development of the times, people's automation requirements for things around them have become higher and higher, and vehicles are no exception. Among them, smart parking systems are eager to be realized. The operability and intelligence determine the future of parking systems.
This design is designed to automatically control the entire parking system by interacting multiple modules with the minimum system of the selected microcontroller. Bluetooth module, compass module and ultrasonic module mainly send the vehicle position information to the minimum system of the MCU. The sound and light obstacle avoidance module and the ultrasonic module are responsible for determining the information of the car. The motor drive module and the rudder module are responsible for receiving data from the minimum system of the MCU to control the vehicle.
Key words: upper computer the smallest system of SCM automatic parking.
目录
第一章 绪论 1
1.1课题的目的和意义 1
1.2 课题的国内外研究现状 1
1.2 1 国内研究现状 1
1.2.2 国外研究现状 1
第二章 基本原理及技术应用介绍 2
2.1超声波原理的使用 2
2.2 蓝牙通信技术的使用 2
2.3 电子指南针技术的使用 3
2.4 单片机最小系统的应用 3
2.5Altium Designer的使用 4
第三章 系统的硬件设计 5
3.1 系统总体设计及结构图 5
3.2 系统的硬件设计 5
3.3 下位机硬件设计 6
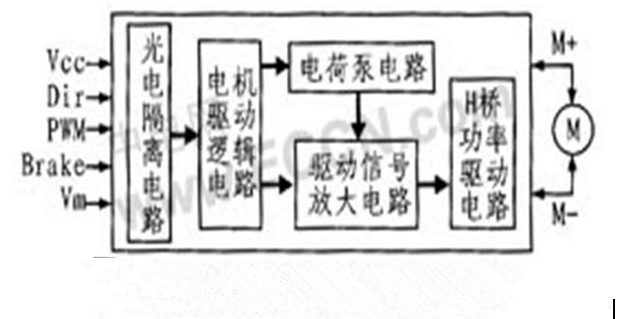
3.3.1 电机驱动电路 6
3.3.2 舵机 7
3.3.3 超声波测距模块 8
第四章 系统的软件设计 9
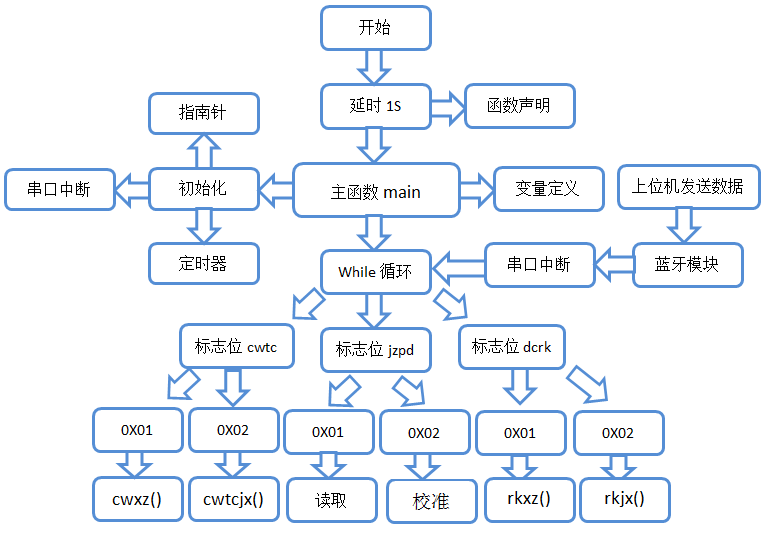
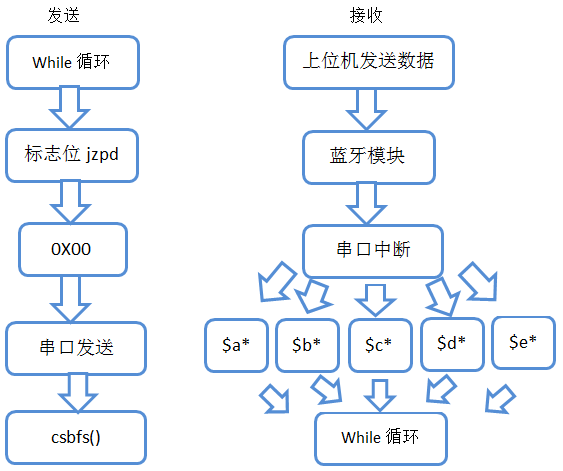
4.1下机位程序设计 9
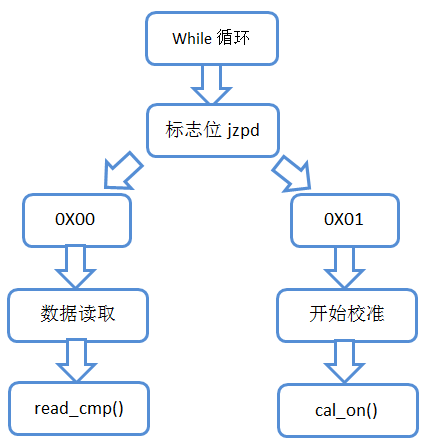
4.1.1 电子指南针模块数据接收及校准 10
4.1.2 串口收发数据与处理功能 10
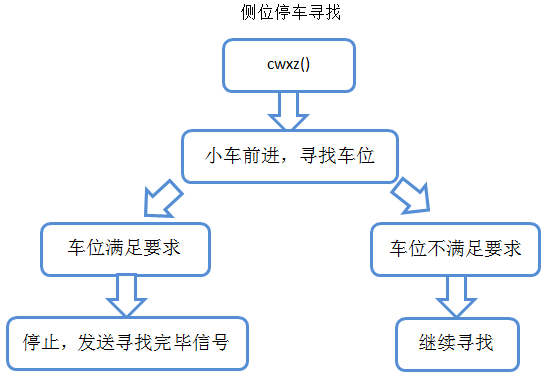
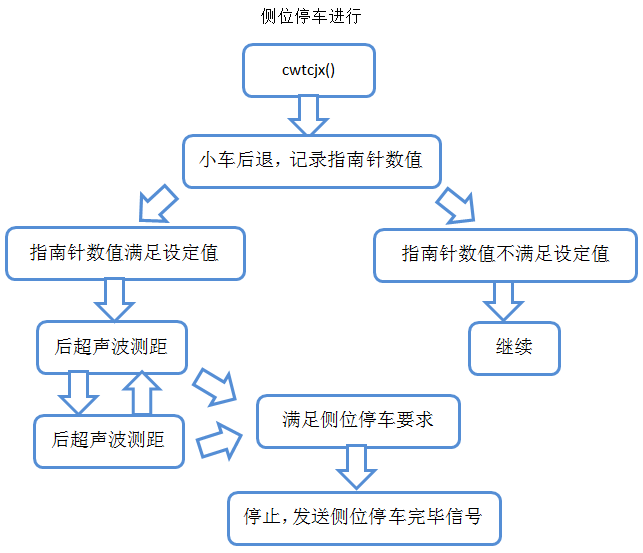
4.1.3 小车的控制程序 12
4.2 上位机程序设计 14
4.2.1定时器组件程序 14
4.2.2 串口组件及串口触发事件函数程序 15
4.2.3 指南针控制程序 17
第五章 总结及发展趋势 18
参考文献 19
附录 21
致谢 30
第一章 绪论
1.1课题的目的和意义
最近的几十年以来,汽车工业越来越趋向智能化,相比与人工泊车的操作难度大,对驾驶员的要求高,自动泊车的需求越来越高。如果可以由计算机代替驾驶员来精确的控制车辆进入停车位,就可以大大提高泊车效率,解决停车难题。
随着车辆的普及度、保有量越来越高,街道、小区、公路、停车场等拥挤不堪,人们对车辆的可操作性和智能性也提出了更多的要求。城市的发展跟不上人们日益增进的生活空间要求,车位紧张,间距小,为了解决车辆剐蹭,人工倒车时间长的难题。如果我们只需按动自动泊车指令,就可以让车辆安全精确地倒入我们预想的车位,这样的想象在现在成为可能。
1.2 课题的国内外研究现状
1.2 1 国内研究现状
2005年,首都师范大学的教授,根据其变论域自适应模糊控制器的基本思想,通过仿真实验的方法,以优良的普适性和准确性设计了一套可以用于重型车辆的倒车系统。
2009年,吉林大学教授利用相关技术,总结优秀驾驶员泊车习惯,应用了模糊算法的规则,建立了模糊控制器,搭载了车辆运动模型和平行泊车技术,成功检验了模糊算法在车辆路径设计中的合理性。
国内的汽车工业的起步较晚导致了在自动泊车领域的出发也在现在停留于理论和仿真阶段,远没有投入生产和市场。
1.2.2 国外研究现状
在2013年的欧洲,著名的汽车生产商奥迪公司,他的研发团队也在试图应用各种方法来实现自动泊车,而通过搭建Wi-Fi连接就是他们的主打技术,主要的是通过手机应用APP远程控制的方法。 日系车辆也实现了可以在停车场这样复杂的环境里成功精确寻找到泊车位,并机械化泊车,将泊车问题成功交由计算机执行,他们采用的是云服务技术,同时可以将车辆信息向车主的手机通过APP实时传输。
国外的某些著名汽车厂商如保时捷,宝马,奔驰等都将其自主研发的自动泊车系统配备到其各系车型中,并实行了产量化。
第二章 基本原理及技术应用介绍
2.1超声波原理的使用
从超声波的原理和性质来看,它和普通声波差不多,必须通过介质传输,也就是说,在没有气体、液体、固体介质的情况下,不能实现信息的传输。在传播的方式中,其他机械波之间的最大差别是超声波通过介质的分子运动作为载体传播的。另外根据超声波的表达式,超声波自身的频率越强,导致其衰减系数变大,传播距离就自然变短;反之如果声波的频率越低,其衰减系数变小,传播距离就随之变远。但在频率提高的同时,声波的波束就会渐渐变窄,故频率高的声波比同振幅的低频波具有延直线传播路径长,反射能力强的特点。
从适用性来看,最早研究的超声技术是测量对象距离系统的使用。超声波原理用以与检测障碍物之间的距离,从而得知探测器与物体之间的距离。它在农工业以及军事中有着广泛的应用,因为它的穿透性和方向性是其他声波所无法达到的。卫生器具的清洗、传感器的开发及应用、钢铁工业伤情检测等。
在工业领域中,特别是当测距条件有限时,现场测距仪往往选择超声波作为无接触距离测量的第一种方法。因此,如果人工智能停车需要完成自主定位操作,避免障碍物运动、路径自动生成等,超声波测量系统则是不可缺少的一部分。在自动停车的过程中,超声波测距的不断发展必须是一个循序渐进的步骤。
在经济成本方面的考虑中,超声波测距系统硬件结构所需的部件已经批量生产和模块化。测量物体的实际距离是非常准确和方便的,它的误差一般可以精确到小数点后的两位。具有操作性强、可靠性强、性价比高、对人和物体无损伤等优点。
在本系统测距的使用过程中,对于超声波的传播路径需要做合适的距离考虑,太长太短都会有一点的影响,所以我们对超声波的频率要求是衰减速度较慢,以保证其在一定距离内的发送和接收,故我们选用频率为f = 40 k Hz的超声波作为发送源。
2.2 蓝牙通信技术的使用
由于考虑到需要在停车场的这样一个较小区域内实现无线通信,以及局域网组网的实时通信 故本次设计采用的无线通信技术是蓝牙通信技术。蓝牙通信技术以其具有相对较优良的抗干扰性、安全性、廉价性等特点,达到了本系统的无线通信要求。相比于备选的红外传输技术,蓝牙通信克服了前者的定向限制以及障碍物的干扰,且具有峰值高为1Mbps的传输效率。
将蓝牙模块嵌入到车辆中,与单片机产生数据交互。通过建立具有两个或多个蓝牙设备的小型局域网网络,局域网的特点是灵活方便。通过该技术,可以提高嵌入式安全系统的可操作性、稳定性和安全性。
蓝牙通信在数据通信领域还没有得到很好的发展及应用,但我们不能忽视它,虽然蓝牙技术与其他通信技术相比相对较晚,有相应的缺点和短板,但是潜力毋庸置疑。 就像手机中的蓝牙模块一样,车载蓝牙也同样面临着耗电量大的问题,并且蓝牙技术也受其相对较短的传输距离的影响,这也是相同的。任何技术都会有缺点和瓶颈,通过检查,目前市场蓝牙传输长度约为10m,通过功率放大器可以提高到100米。
由于蓝牙通信可以在同类型的短距离无线通信技术中使用,具有较强的抗干扰能力、高传输效率、局域网的灵活和方便,以及性价比高、耗材少的特点。相信它也可以很好地应用在自动泊车系统中。故本系统选用频段在2.4 GHz ISM蓝牙通信设备工作,满足本系统的通信要求。
2.3 电子指南针技术的使用
当我们控制车辆的转向操作时,需要得到车辆旋转的方位角。此时就需要电子罗盘技术发挥他的作用了。霍尔材料和磁阻材料是电子指南针主要的材料来源。霍尔的材料使用的是霍尔原理,即当恒定电流通过导体时,电压会随磁感应强度线性变化。
我们可以假设地球磁场与地平面平行,如果两个霍尔装置可以垂直放置在车辆的平面上,我们可以通过感知两个霍尔装置中地球磁场的磁感应强度的分量,从而获知地球磁场的方向。
磁阻材料的使用可以形成桥式,测量桥的两个节点的电压,来表示单个方向上的磁感应强度。类似地,在放置在两个垂直桥中的车辆中,可以测量磁场的方向。同时我们需要结合重力加速度传感器来测量三维空间中磁场的分布情况。
当然,虽然电子罗盘的各方面属性很优秀,但也不是没有缺点,停车场的环境可能有点复杂。这些需要修正的偏差是由磁场环境的影响引起的。车辆周围的环境和内部的磁场是非常复杂的,因此,如果磁场是无序的,就必须这样做。校正原理是在记录所有方向的磁性数据的同时,通过其他传感器捕获车辆的运动状态和位置。
综上对电子指南针技术的介绍,本次系统我们选用了GY-26电子指南针,这是一款低成本平面数字罗盘模块。电压功耗底,体积小。该指南针在RS232协议和IIC协议中与单片机最小系统进行通信。以其精度高,稳定性强,且具有重新标定的功能,可以在任意位置得到准确的方位角而为本次设计的自动泊车系统所选用。其输出波特率为9600 bPs,数据通过查询输出。
2.4 单片机最小系统的应用
STC15F2K61S2微控制器是单时钟、机器周期1T,由STC公司产生的新一代51单片机,采用更加高级加密技术,具有高速、高可靠性、低能耗和超强抗干扰特性。
该单片机的选择是因为它能完全节省外部振荡器和复位电路,内部集成高精度的R/C时钟, 1%温度浮动,以保证其被设定在5MHZ-35MHZ宽范围。
在本设计中,我们主要采用该MCU的P0口来驱动12864液晶显示屏。进行数据传输的是P3.2端口和温湿度检测模块;为AD采样的端口为p1.1端口,STC15F2K61S2还由 8个通道和10位高速电压输入模数转换器集成。以逐次比较方式进行A/D转换,可以达到的最高速度为300 kHz。其表示可以用于监测液位、湿度、压力、温度和其他物理量。管脚图如图2-1
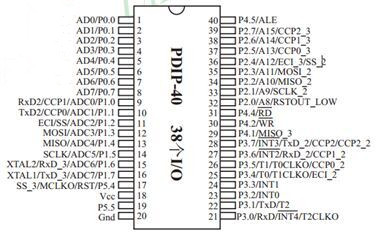
图 2-1 STC15F2K61S2 单片机管脚图
2.5Altium Designer的使用
Altium Designer主要采用电路设计中的电路设计和印制电路设计,完成电路的基本设计。而通过该软件仿真的功能可以明确系统的各项性能,并以此作为电路调试的基准。该软件主要以实现设计、印刷电路板设计、FPGA开发、嵌入式开发、3D PCB设计,为用户提供全新的设计方案。
因此,掌握软件的功能,合理地应用于电路设计,可以为系统的电子电路的设计提供一种最为合适解决方案。
第三章 系统的硬件设计
3.1 系统总体设计及结构图
该系统是由多个模块与所选微控制器的最小系统交互,从而实现自动控制整个停车系统。蓝牙模块、指南针模块和超声波模块主要将车辆位置信息发送到单片机的最小系统,声光避障模块与超声波模块相配合负责确定汽车的信息。电机驱动模块和舵模块负责接收单片机最小系统的数据来控制车辆。其结构框图如图3-1所示:
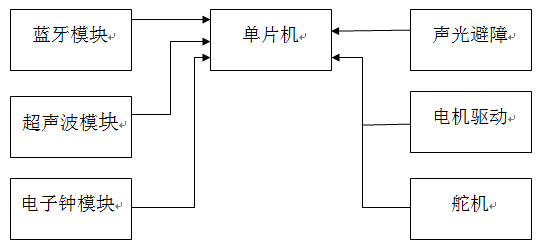
图3-1 系统结构框图
蓝牙模块将车辆数据发送到MCU系统,通过串口实现通信过程,并在上位机上处理MCU最小系统发送的数据,并将其显示在上位机接口上,使系统的控制更加透明化。同样的,超声波模块、电子罗盘模块和光电避障模块也由单片机最小系统接收其相应的数据,其中超声波模块可以检测汽车前后障碍物的距离并将其传送到MCU系统(单片机系统)中,由单片机的最小系统接收的超声波数据用以确定为小车的下一个控制动作;单片机的最小系统可以通过实时获取方向信息来准确定位汽车。
根据光电避障模块反馈的信息,可以判断停车位是否满足要求,并控制汽车下一次自动停车动作。
汽车与转向器之间的协调可以精确地控制汽车的停车动作的方向。其中还有2个超声波模块,与汽车合作完成自动泊车过程。超声波模块可实现汽车前后障碍物距离的实时测量。通过距离信息,可以初步判断车辆的信息和位置,并根据车的位置信息的差异大小来确定车辆的自动停车动作。
3.2 系统的硬件设计
本次设计的数据提供部分由蓝牙模块的数据模块,GY-26电子指南针模块和超声波测距模块组成,光电避障模块与之配合,数据处理模块为STC15F2K61S2 MCU最小系统,控制模块由电机驱动模块和舵机组成。
在该设计中,采用STC15F2K61S2微控制器作为数据处理器。上位机接收的数据控制汽车完成相应的自动停车运动,上位机与上位机之间的通信由蓝牙通讯模块实现。波特率发生器发生在单片机的定时器2上。MCU与GY-26电子罗盘模块之间有两种通信方式,分别是IIC通信和串行通信。但是在本设计中,由于蓝牙和超声波测距模块,电机和转向机将MCU的最小系统定时器全都占用了,所以只能IIC 通信来完成GY-26电子罗盘模块和单片机最小系统之间的通信交流。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: