智能泊车的车位识别系统毕业论文
2020-04-11 17:51:46
摘 要
人民生活水平的提高带动了汽车工业的发展,人们对泊车安逸的追求使得智能泊车系统成为了行业内研究的热点。如果能实现智能泊车,将会极大改善人们的泊车体验。
本文主要对智能泊车的路径规划和车位检测算法[1]进行研究,并利用贝塞尔方程[2]对所规划路径进行优化,方便后文的路径仿真。首先建立了二维的车辆运动学模型,在平行泊车方面采用两段相切圆弧法,垂直泊车方面采用直接倒车的方式,建立了坐标系,将泊车过程分为多个阶段,通过几何关系求解出起始位置、转向关键点、所需车位等关键信息。采用超声波传感器和摄像头两种方式检测搜索泊车位。然后提出了泊车系统的整体设计方案,具体设计了驱动模块、转向模块、超声波测距模块以及信号处理模块等部分的硬件结构,提出了各部分的软件流程。
利用MATLAB的 simulink 模块对规划路径进行仿真,分析总结仿真结果,路径仿真对起始位置要求很高,设计控制模块可以满足仿真要求。因为仿真规划路径存在不连续的问题,课题采用贝塞尔方程优化平行、垂直泊车路径,仿真结果也证明了贝塞尔曲线优化的适用性。
关 键 词:智能泊车,路径规划,车位检测,贝塞尔曲线
Abstract
With the increasing living standards of the people, the automobile industry has also developed rapidly. The smart parking system has also become a hot topic in the industry. If smart parking can be realized, people's parking experience will be greatly improved.
This paper mainly studies the intelligent parking path planning and parking space detection algorithm[11], and uses the Bessel equation to optimize the planned path to facilitate the following path simulation. Firstly, a two-dimensional vehicle kinematics model was established. Two-phase tangent arc method was adopted for parallel parking, and direct parking was used for vertical parking. A coordinate system was established to divide the parking process into multiple phases. Solve the key information such as starting position, turning key point, required parking space through the geometric relation. Ultrasonic sensors and cameras are used to detect parking spaces in two ways. Then proposed the overall design of the parking system, specifically designed the vehicle control unit, power steering module, ultrasonic ranging module, video acquisition module and signal processing module and other components, and put forward the software flow of each part.
The simulink module of MATLAB simulates[12] the planning path, and the simulation results are analyzed and summarized. The simulation results are not accurate enough and the requirements on the initial position are very high. Because of the discontinuity of the planned path, the Bessel equation is used to optimize the parallel and vertical parking paths. The simulation results also prove the applicability of the Bessel curve optimization.
Key Words:Intelligent Parking, Path Planning, Parking Detection, Bezier Curve
目 录
摘 要 I
Abstract II
第1章 绪论 1
1.1课题研究背景 1
1.2 国内外研究现状 1
1.2.1 国外研究现状 1
1.2.2 国内研究现状 2
1.3研究目的、意义和价值 2
1.4 研究内容和关键技术 2
第2章 汽车运动学模型及路径规划 4
2.1 汽车的运动学模型 4
2.1.1 汽车相关参数 4
2.1.2 车辆运动学建模 4
2.2 路径规划 7
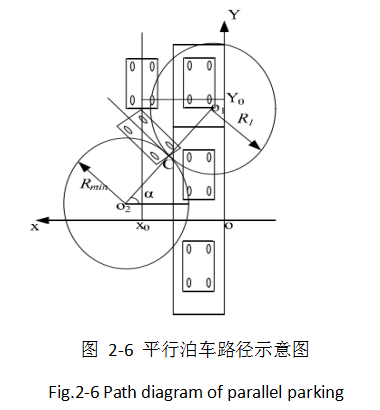
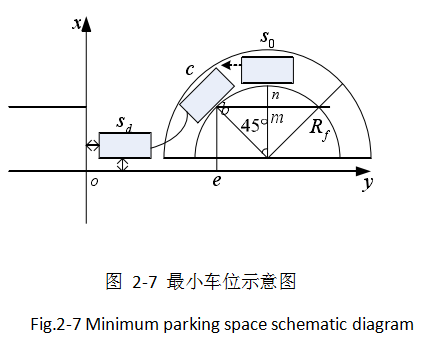
2.2.1 平行泊车路径的规划 7
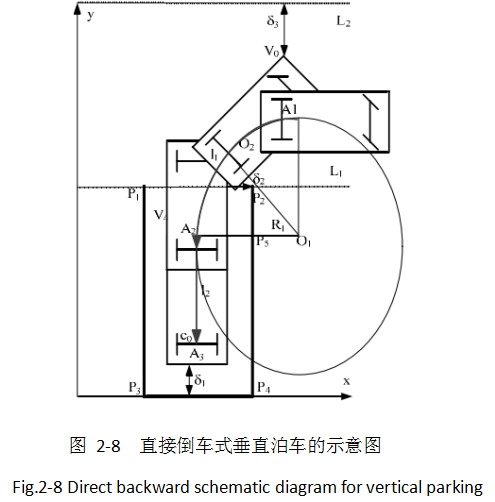
2.2.2 垂直泊车路径的规划 13
2.3 本章小结 16
第3章 车位检测算法 17
3.1 基于超声波的泊车位检测 17
3.1.1超声波测距原理 17
3.1.2超声波测距实现平行泊车位检测 17
3.1.3超声波测距实现垂直泊车位检测 18
3.2 基于摄像头的泊车位检测 19
3.2.1 泊车位宽度和长度 19
3.2.2 泊车位起始位置 21
3.3 本章小结 21
第4章 自动泊车系统的设计 23
4.1 模型车整体结构 23
4.2 车辆控制系统的硬件设计 24
4.2.1 车控电路MCU 24
4.2.2 动力模块 24
4.2.3 转向模块 25
4.2.4 距离反馈模块 26
4.2.5 超声波测距模块 27
4.3 车辆控制系统的软件设计 30
4.3.1 车辆控制电路软件框图 31
4.3.2 动力驱动软件流程 31
4.3.3 转向驱动电路软件流程 32
4.3.4 超声波测距软件流程 33
4.4 信号处理电路 34
4.4.1 硬件框架设计 34
4.4.2 信号单元的处理器 34
4.4.3 信号单元的视频采集 35
4.4.4 视频采集与传输的软件流程 37
4.5 本章小结 37
第5章 基于贝塞尔曲线的路径优化 38
5.1 贝塞尔曲线 38
5.2 贝塞尔曲线的性质及拼接 38
5.3 平行、垂直泊车路径的优化 39
5.4 本章小结 44
第6章 泊车路径仿真及结果分析 46
6.1 平行泊车路径仿真 46
6.2 垂直泊车路径仿真 47
6.3 结果分析 48
6.4 本章小结 48
第7章 结论与展望 49
7.1 结论 49
7.2 展望 49
参考文献 50
致 谢 52
第1章 绪论
1.1课题研究背景
改革开放以后,人们的生活条件越来越好,对车辆的需求也越来越大,也就带动了汽车行业的发展。尤其是近几年,我国汽车数量大幅增加,虽然汽车的数量越来越多,但是相应的设施却没有随之发展,这也就导致了车辆数目与停车位之间巨大的矛盾,造成的结果就是车辆胡乱摆放,不仅影响了城市美观也妨碍了交通秩序,每年都因此发生相当多的交通事故。随着现代科学技术的飞速发展,人们也将更多地先进技术应用于汽车行业,也因为人们对智能时代的向往,诱导了汽车向更高智能的方向发展,于是汽车的全智能泊车也成为了研究中的热点。
汽车工业在几十年间飞速发展,汽车出现的早期就只是许多结构的简单组合,现在开始向各方面发展,不仅舒适而且安全省心。汽车的制造包含了多学科、多领域的综合技术,机械、电子、智能等等多方面都囊括其中,目前能开发出智能泊车系统的厂商还是少数,价格也是令人瞠目结舌。
智能泊车系统可以代替驾驶员完成泊车,减少驾驶员的操作,这样驾驶员会更加省心,而且系统泊车对比驾驶员泊车来说更加可靠,大大提高泊车的安全行。但是国内对这项技术的研究还刚开始,也无法借鉴国外的理论,这就使得国内的这项技术越发难以精进,所以在这种情况下,国内需要加大对这项技术的研究力度,这也一定是值得的。
1.2 国内外研究现状
1.2.1 国外研究现状
德国大众在智能泊车技术方面保持领头羊地位。大众于1992年将智能泊车技术应用在一款名为IRVW Futura 的概念车上。IRVW概念车在操作台中安装了微型计算机来控制整个智能泊车系统,由此来实现全自动泊车。
沃尔沃(Volvo)于2004年开始Evolve项目的研究,将自动泊车技术加入汽车研发中,并成功地开发出了可以自动顺列式泊车的汽车,在操作台里装上计算机用来控制方向盘、油门及离合。
威迪欧和西门子合作,它们研发了一种智能泊车系统,这种系统在驾驶员想要泊车的时候开始检测可以停车的泊车位,检测到之后就会提示驾驶员可以泊车,此时驾驶员可以把操作界面交给系统主持,系统就会自动泊车,这个系统在宝马车上验证过,最终被命名为“Parkmate”。
国外的智能泊车技术研究还是分为两个主流,一个主流方向是对路径的规划,另一个主流方向是基于驾驶经验的泊车(Skilled-based Approach)。
1.2.2 国内研究现状
国内对智能泊车系统的研究还比较原始。目前也主要有两种方向:一种就是全人工系统,泊车操作全部由驾驶员完成,系统只是通过各种设施帮助驾驶员更好地了解泊车的情况,只是起到一个辅助作用;另一种泊车系统属于半智能半人工,该系统可以完成对泊车位的检测,甚至可以帮助驾驶者规划出最佳路径,但是只能对用户泊车起到辅助作用。因为还是需要用户的参与,所以这种产品也不是完全意义上的智能泊车,不过较之以往已经有了很大的改进。
在 1999 年的上海大学,教授林瑞燊对多维模糊控制器进行了调查研究;清华大学还开发了一类THRM系列的机器人,开发这类机器人的目的是为了研究它的识别方向和躲避障碍的功能,为此还给它周身加了许多超声波感应器。
国内智能泊车系统的研究还处在起步阶段,主要方法就是模糊控制这方面,其它方法也就是对模糊控制进行改进完善,加入变论域或者采用神经网格等。
1.3研究目的、意义和价值
目的是研究智能泊车的车位识别系统,提出检测泊车位的算法,规划平行、垂直泊车路径,设计智能泊车系统的各组成模块,最终实现智能泊车。
本课题利用超声波雷达和摄像头识别停车位。通过模糊控制规划路径,通过车辆的各控制模块实现智能泊车。本课题理论意义在于,提高泊车的智能性、安全性和稳定性,减少泊车所需空间及时间。
本课题的应用价值:(1)降低泊车事故率;(2)节省时间、空间,提高效率;(3)维持交通秩序;(4)改善泊车体验。
1.4 研究内容和关键技术
本课题的研究内容是智能泊车系统。首先建立车辆的运动学模型,通过模型数据和车辆特性对平行泊车进行路径规划,垂直泊车亦然。采用贝塞尔曲线优化泊车路径的不连续性。最后通过仿真验证设计的适用性。
①提出自动泊车系统中检测车位的算法,也提出了规划路径的算法。建立运动学模型,在此基础上完成了平行、垂直泊车位的检测以及路径的规划。
②设计智能泊车系统,对距离反馈、动力驱动、转向控制、信号处理等模块进行硬件设计,提出软件程序流程图。
③优化泊车路径,对平行、垂直泊车路径进行仿真并分析仿真结果。
④总结全文工作,展望研究方向。
第2章 汽车运动学模型及路径规划
2.1 汽车的运动学模型
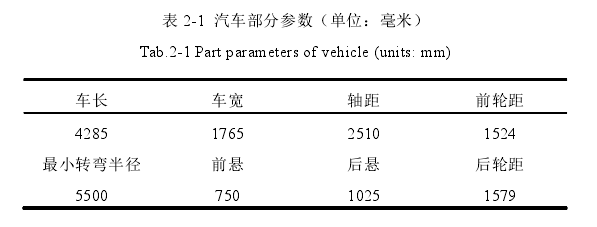
2.1.1 汽车相关参数
汽车的特性由其本身的指标参数体现。所需泊车位的泊车起始位置、长度和宽度的确定直接受到汽车前悬、宽度、长度、后悬以及最小转弯半径的影响。
汽车参数如表2-1。
2.1.2 车辆运动学建模
车辆泊车时是保持恒定的低速行驶的,在泊车的过程中,可以把车辆整体看做一个固定的矩形整体,车辆每个点的运动轨迹都是相同的[3]。图2-1为车辆运动学模型。
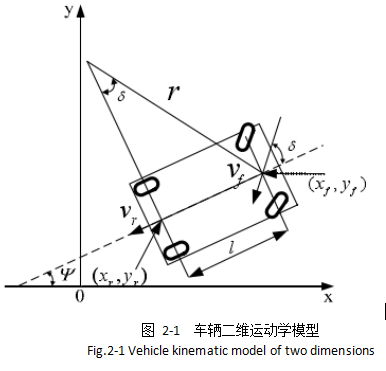
图中,车辆前轴中心点的速度是 f后轴中心点的速度是
f后轴中心点的速度是 r,(
r,( r ,
r , r)是后轴中心的坐标,(
r)是后轴中心的坐标,( f ,
f , f )是前轴中心的坐标,
f )是前轴中心的坐标, 是前轴到后轴的距离,δ是车前轮与汽车相比转过的角度,ψ 是车身的中轴线和 水平X 轴之间的角度。
是前轴到后轴的距离,δ是车前轮与汽车相比转过的角度,ψ 是车身的中轴线和 水平X 轴之间的角度。
车辆倒车时的运动可以表示为
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: