自主车辆协同自适应巡航控制系统毕业论文
2020-04-11 17:52:01
摘 要
随着高速公路的迅速发展和车辆数量的增加,交通安全问题已经成为当今社会急需要解决的问题。自适应巡航控制系统是一种驾驶辅助装置,其可以检测宿主车与前车之间的相对速度和相对距离,通过下层控制器的控制使得宿主车与前方车辆保持在安全的距离之内。当前方车辆加速行驶,宿主车也随之加速直至达到巡航的速度,当前方车辆减速时,宿主车也随之减速,与前方车辆保持在安全距离内,当前方没有车辆时,宿主车进入巡航状态。
根据相关的文献资料,自适应巡航控制系统主要包含上层控制器、下层控制器和车辆数学模型等,本文参考前人研究的车辆数学模型与上层控制器的研究,主要设计下层控制器的控制器,优化下层控制器的结构和参数,并采用自适应模糊PID控制器对其进行控制,提高了系统的控制精度与调节时间。
下层控制器根据上层控制器输出的期望加速度,与实际加速度相比较,通过自适应模糊PID控制器的模糊推理对参数进行优化,对宿主车加速度进行控制,能够降低超调量,减少系统的振荡次数和调整时间,使其能在短时间内加速度能够达到期望加速度的值,又能够保证车辆的平滑性和稳定性。
最后,在MATLAB/SIMULINK中建立了一个低层控制器和仿真系统,构建了一个自适应模糊PID控制器,并在加速、减速、匀速三种形式模式下进行系统的仿真。实验结果表明,采用自适应模糊PID控制器的下层控制器,可以很好地实现对加速度的控制效果,在加速、减速、匀速三种模式下,宿主车的加速度可以在短时间内跟上前车加速度的变化,从而达到了安全驾驶的效果,证实了系统的有效性。
关键词:自适应巡航控制、自适应模糊PID控制器、下层控制器、参数优化
Abstract
With the rapid development of the expressway and the increasing number of vehicles, traffic safety issues have become an urgent problem in today's society. The adaptive cruise control system is a driving assistance device that can detect the relative speed and relative distance between the host vehicle and the preceding vehicle. The controller of the lower level controller keeps the host vehicle and the preceding vehicle within a safe distance. When the current vehicle accelerates, the host vehicle accelerates until it reaches the speed of cruising. When the current vehicle decelerates, the host vehicle also decelerates and stays within a safe distance from the vehicle in front. When the current vehicle does not have a vehicle, the host vehicle enters the cruise. status.
According to relevant literature, adaptive cruise control systems mainly include upper controllers, lower controllers, and vehicle mathematical models. This article refers to previous studies of vehicle mathematical models and upper-level controllers, mainly to controllers of lower-level controllers. Design, optimize the structure and parameters of the lower controller, use adaptive fuzzy PID controller to control, improve the system's control accuracy and adjustment time.
The lower controller compares the actual acceleration with the expected acceleration output from the upper controller, optimizes the parameters through adaptive fuzzy PID controller's fuzzy inference, and controls the acceleration of the host vehicle to reduce the overshoot and reduce the system oscillation. The number of times and the adjustment time make it possible to achieve the desired acceleration in a short period of time while ensuring the smoothness and stability of the vehicle.
Finally, the lower-level controller and simulation system are built in MATLAB/SIMULINK to construct an adaptive fuzzy PID controller, and the system is simulated in the three modes of acceleration, deceleration, and uniform speed. The experimental results show that the adaptive fuzzy PID control is used. The lower controller of the device can well achieve the effect of controlling the acceleration. Under the three modes of acceleration, deceleration and uniform speed, the acceleration of the host vehicle can keep up with the change of the acceleration of the preceding vehicle in a short time, thereby achieving safe driving. The effect confirms the effectiveness of the system.
Keywords: adaptive cruise control, adaptive fuzzy PID controller, lower controller, fuzzy reasoning, parameter optimization
目录
第1章 绪论1
1.1 研究背景及意义1
1.2 自适应巡航控制技术发展现状2
1.3 研究内容和目标3
1.4 主要内容及结构安排4
第2章 实验车辆数学模型5
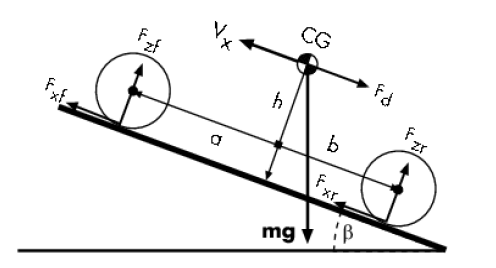
2.1 车体纵向动力学模型5
2.2 发动机模型7
2.3 自动变速器模型8
2.4 轮胎模型9
2.5 刹车模型10
2.6 车辆整体数学模型实现10
2.7 小结10
第3章 上层控制器11
3.1 控制目标11
3.2 驾驶习惯11
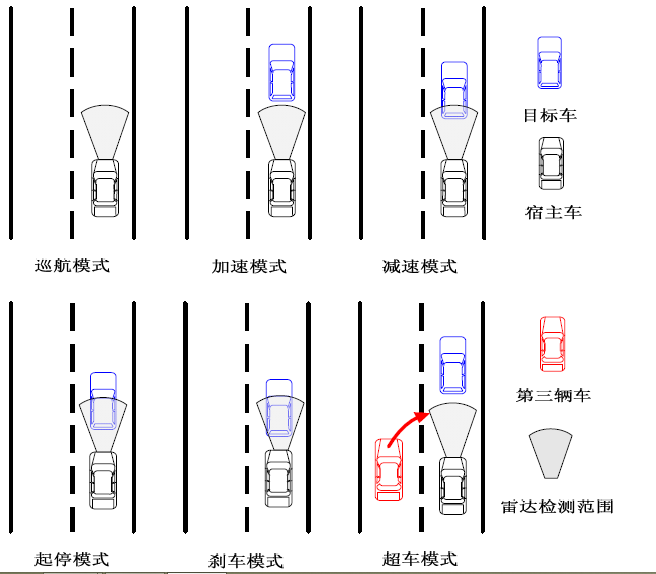
3.3 驾驶模式12
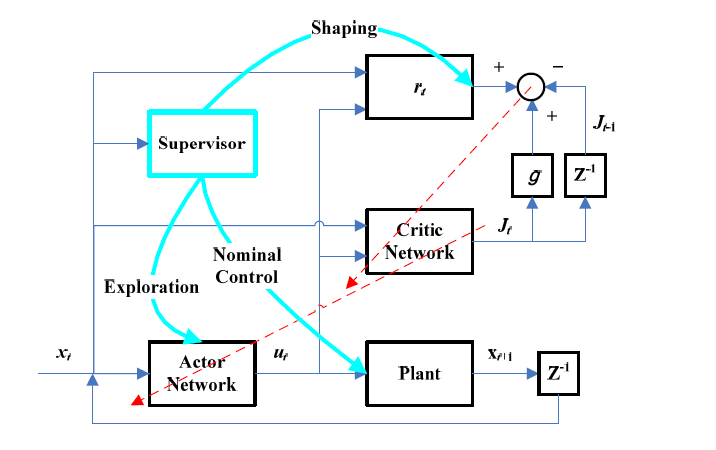
3.4 监督式自适应动态规划13
3.5 奖惩和回报14
3.6 小结14
第4章 下层控制器15
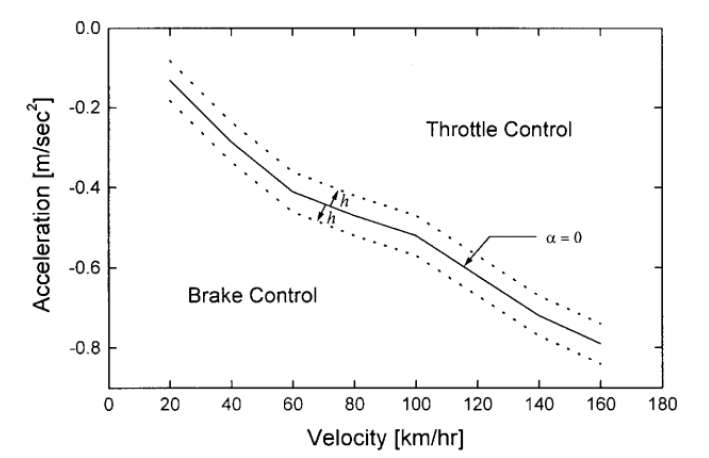
4.1 油门与刹车切换15
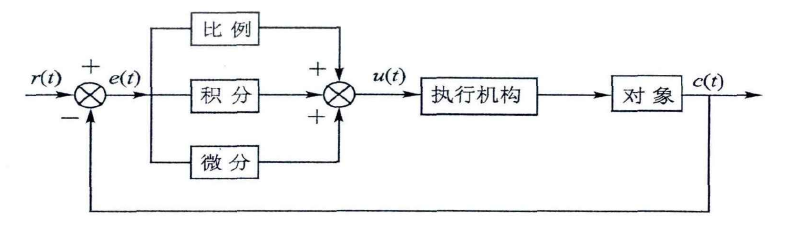
4.2 PID控制器15
4.2.1 PID控制算法简介16
4.2.2 PID参数整定与采样周期选择17
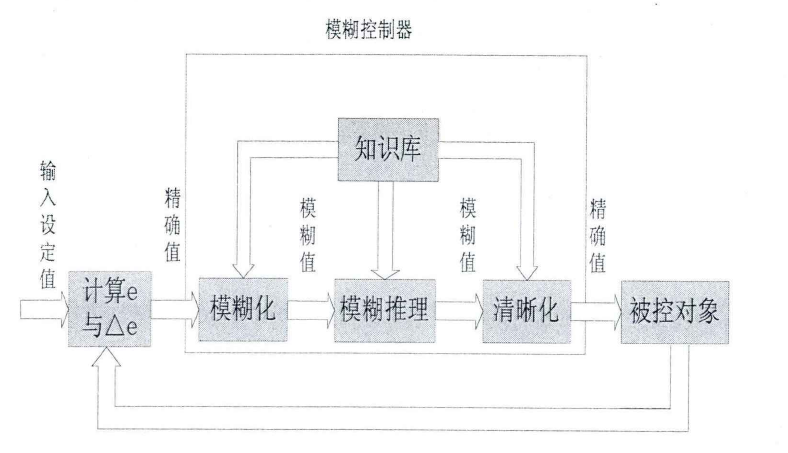
4.2.3 自适应模糊PID控制器18
4.3 小结26
第5章 实验仿真结果27
5.1 仿真模型搭建27
5.2 仿真结果及分析29
5.3 小结31
第6章 总结32
致谢33
参考文献34
第一章 绪论
1.1研究背景及意义
为解决交通安全问题,世界各大汽车厂商及相关研究机构多年来不断致力于汽车电子技术的研发创新,希望通过提高汽车的安全性能和开发汽车辅助驾驶系统减少甚至避免交通事故的发生。其中,巡航控制系统(CCS)已在汽车辅助驾驶系统中得到发展。CCS允许驾驶员在不使用油门踏板的情况下自动保持车辆的速度,使车辆以固定的速度行驶。配备了CCS装置的车辆,可以消除长时间在高速公路上行驶时控制加速踏板的需要,从而可以减少疲劳,同时减少不必要的速度变化并节省燃料。
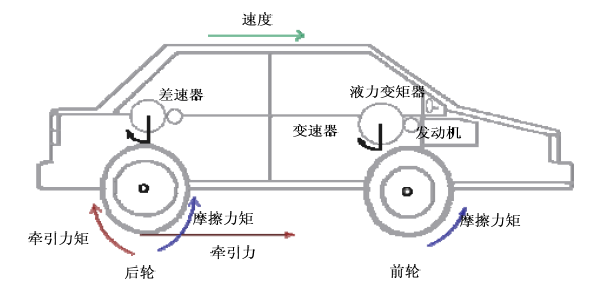
但作为一种辅助驾驶系统,CCS只能根据驾驶员设定的速度值进行驾驶,且功能相对简单,当前方存在车辆或障碍时,驾驶员操作制动或减速。自适应巡航控制系统系统可以使用传感器检测前方物体,计算出两车相对速度,输出两者之间保持安全距离的控制量,其原理如图1-1所示。自20世纪70年代以来,各大汽车制造商一直在相互竞争,开发汽车巡航控制系统并安装在高档汽车上。到20世纪末和目前展出的21世纪汽车,该系统日益完善,系统电路集成水平不断提高,控制模块体积变小,多路传输系统也变得更加成熟,自检系统变得更加精确。最初的自适应巡航控制系统仅适用于车速大于40km/h的情况,而现在自适应巡航控制系统已经发展到车辆的起停控制(Stop and Go, 简称SG),碰撞报警和避免等,大大增加了自适应巡航控制的使用,从而使自适应巡航控制系统适应城市车辆成为可能。
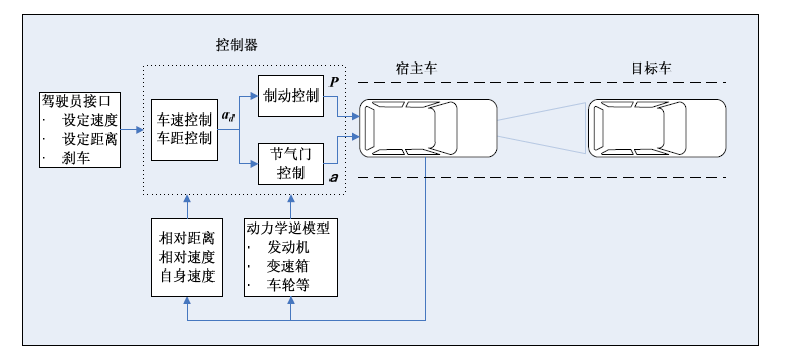
图 1-1车辆自适应巡航控制系统原理图
随着自适应巡航控制技术的日益成熟,该系统在车辆中的应用也越来越广泛。比如欧洲的奔驰、宝马、奥迪等车型都配备了自适应巡航控制系统。另外,由于日本高速公路的快速发展,自适应巡航控制系统的负载率也在增加,并且各种类型的车辆已经使用自适应巡航控制系统作为可选设备,如日本皇冠、雷克萨斯等轿车均配备了自适应巡航控制系统。 我国的自适应巡航控制技术,在产品开发和技术研究上都处于起步阶段。
自适应巡航控制技术可以主动检测前方车辆(也称为目标车辆,target vehicle)和障碍物,并控制宿主车的速度,保证行驶行驶过程中的安全性。同时,该系统还可以限制车辆在不同条件下的极限加速度,从而提高车辆的舒适性。,在巡航的模式下,避免速度变化并节省燃油。最近的研究表明,如果在高速公路上配备自适应巡航控制系统的车辆比例达到1/4,则可以有效减少车辆拥堵,并提高车辆的安全性。自适应巡航控制系统(ACC)是在传统巡航控制技术发展过程中基于巡航控制系统功能开发的辅助驾驶系统。
1.2 自适应巡航控制技术发展现状
自适应巡航控制系统在传统的巡航控制系统中得到了进一步发展,已经成为车辆辅助驾驶系统的重要组成部分。自适应巡航控制系统从出现到现在越来越受到个汽车研发厂商的重视,其发展也经历几个重要阶段。
汽车巡航控制系统(Cruise Control System)起源于20世纪70年代的美国,20世纪50年代末,日本、美国市场出现恒速控制系统。
1981年后,世界各地开始出现以微机控制的巡航控制系统。
20世纪80年代后,以美国、日本、欧洲为代表的汽车公司纷纷开始对ACC系统进行研究。
最早的ACC系统由三菱公司研制而来,其将雷达、处理器和巡航系统结合,形成初具雏形的ACC系统。
1999年,JAGUAR公司发布装有ACC系统的轿车,ACC系统从此正式迈入商品化阶段,此后,各国汽车公司开始不断推出装有ACC系统的轿车,如:2001年的通用汽车Cadillac轿车。
国内的ACC系统研发时间较晚,近年来,国内开始注重ACC系统的研究,先后有多所高校开始投入资金研发ACC系统及相关系统,如:北京理工大学在CCS系统的基础上,将ACC系统与防滑系统ABC相结合构成集合化系统;
随着相关技术的不断发展,研发资金的不断投入,未来,ACC系统的发展趋势将会朝着以下几个方面发展:
①系统越来越集成化,多种系统将会结合起来,实现系统的集成化程度不断提高,体积会越来越小;
②加入走停控制,未来的ACC系统将会加入车辆走停的功能,更方便驾驶员的操作;
③环境感知能力不断提高,在多种复杂的环境下,未来ACC系统可以在更多复杂的情况下实现精确的操作,达到安全驾驶的效果;
④协同控制,未来ACC系统可以通过雷达与无线通信了解周围车辆交通环境的信息,互相之间进行协调操作,可以达到更好的控制效果。
图1-2所示是自适应巡航控制系统的组成图,主要包含信息感知单元、执行单元、控制单元和人机交互界面。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: