无人艇动态避碰控制系统研究毕业论文
2020-04-12 08:46:26
摘 要
随着科技的不断发展,无人平台在工业,军事中的普及,水面无人艇作为一种能够在海洋环境下自主航行并完成各项任务的水面平台得到了极大关注。动态避碰是无人艇自主航行过程中的一项关键技术,本文在考虑到无人艇实际航行过程中的具体问题,将无人艇避碰分为静态障碍物避碰与动态障碍物避碰两方面来展开研究。
本文首先介绍了水面无人艇的基本情况,包括国内外水面无人艇的发展状况与研究现状。然后对无人艇的智能避碰技术进行了相关分析,对无人艇静态障碍物避碰与动态障碍物避碰的策略归纳总结,针对不同的情况,无人艇可通过不同的避碰策略使其安全避碰,最后通过matlab平台进行了仿真实验验证了相关避碰方案的可行性。
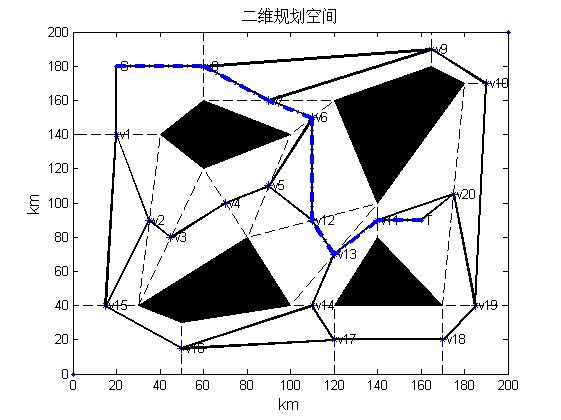
本文在研究水面无人艇静态障碍物避碰时,采用迪杰斯特拉算法与蚁群算法对水面无人艇进行了局部路径规划来实现静态避碰。在研究动态避碰时,本文通过计算TPCA,DPCA与碰撞危险度等相关运动参数来建立动态避碰模型来改变水面无人艇的航向与航速,针对不同的会遇情况采取不同的避碰策略,从而实现动态避碰功能。最终通过多个仿真实验证明了避碰方案的稳定性与有效性。
关键词:水面无人艇;避碰;蚁群算法;迪杰特斯拉算法;碰撞危险度
Abstract
With the continuous development of science and technology, and the popularity of unmanned platforms in industry and military, surface unmanned boats have received great attention as a surface platform that can navigate autonomously and complete various tasks in the marine environment. Dynamic collision avoidance is a key technology in the autonomous navigation of unmanned boats. This paper takes into account the specific problems in the actual navigation of unmanned boats and divides unmanned collision avoidance into static obstacle avoidance and dynamic obstacle avoidance. Try to research in two ways.
This article first introduced the basic conditions of surface unmanned boats, including the status and research status of unmanned surface watercraft at home and abroad. Then it analyzes the unmanned collision avoidance technology, sums up the strategies of unobstructed static obstacle avoidance and dynamic obstacle avoidance for unmanned boats. For different situations, unmanned boats can adopt different collision avoidance strategies. To make it safe to avoid collisions, the simulation experiment was finally carried out through the matlab platform to verify the feasibility of the relevant collision avoidance scheme.
In this paper, Dijkstra's algorithm and ant colony algorithm are used to study the local path planning of unmanned surface watercraft to realize static collision avoidance when studying static obstacles of unmanned surface water. In the study of dynamic collision avoidance, this paper establishes dynamic collision avoidance models by calculating TPCA, DPCA and collision risk parameters to change the course and speed of unmanned surface watercraft, and adopt different collision avoidance strategies for different encounter situations. , In order to achieve dynamic collision avoidance function. Finally, a number of simulation experiments prove the stability and effectiveness of the collision avoidance scheme.
Keywords: surface unmanned watercraft;collision avoidance;Ant Colony Algorithm;Dijkstra method algorithm;collision risk
目录
摘要 I
Abstract II
第1章 绪论 1
1.1研究背景 1
1.2国内外研究现状与研究水平 1
1.3 研究内容及结构安排 4
第2章 无人艇静态障碍物避碰方案研究 5
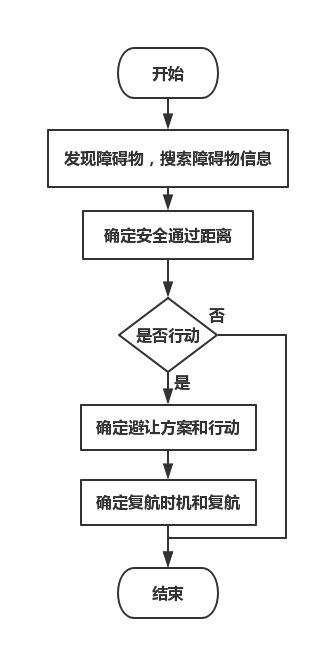
2.1无人艇避碰过程 5
2.2无人艇模型建立 6
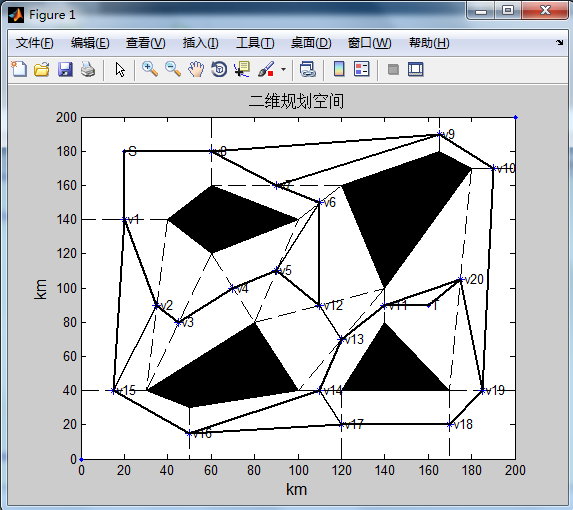
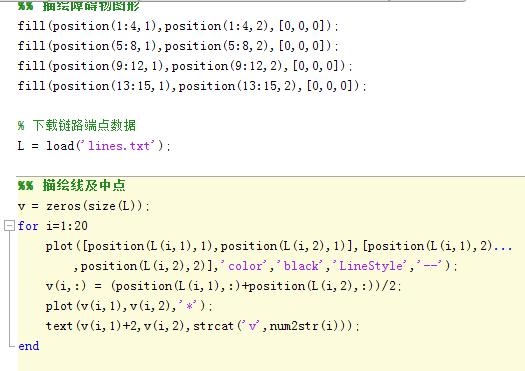
2.3 静态障碍物模型建立 6
2.4 算法实现 7
2.4.1 Dijkstra算法 7
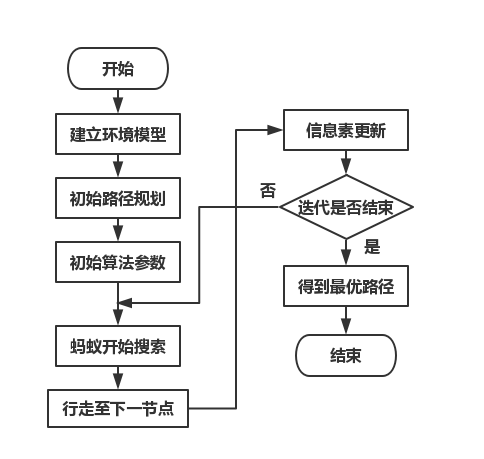
2.4.2 蚁群算法 7
2.5 仿真实验 9
第3章 水面无人艇动态避碰研究 12
3.1 无人艇海事避碰规则 12
3.2 无人艇运动参数计算 13
3.3 DCPA与TCPA简介 15
3.3.1 DCPA与TCPA的介绍 15
3.3.2 DCPA与TCPA的计算 15
3.4 本章小结 16
第4章 碰撞危险度的计算 17
4.1 碰撞危险及碰撞危险度 17
4.2碰撞危险度的计算 18
4.2.1 DPCA、TPCA加权确定法来确定碰撞危险度 18
4.2.2采用人工神经网络方法来确定碰撞危险度 19
4.2.3采用模糊数学方法来确定碰撞危险度 19
4.3本章小结 21
第5章 水面无人艇动态避碰系统仿真 22
5.1 避让策略的研究 22
5.1.1 改变航向角来实现避障 22
5.1.2 改变航速来实现避障 23
5.1.3 同时改变航速与航向进行避让 23
5.2 无人艇动态避碰仿真系统 24
5.2.1 GUI人机界面的建立 24
5.2.2无人艇动态避碰策略仿真 24
5.3 无人艇仿真结果分析 26
5.4本章小结 26
总结 27
参考文献 28
致谢 30
第1章 绪论
1.1研究背景
水面无人艇简称无人艇或USV,是因海上作战、海区监测、海洋环境监测等需求随之产生的新型智能水面航行艇,在错综复杂的海洋环境中,无人艇常被用来执行特殊的、不适合有人船只完成的任务。水面无人艇具有速度较快,安全性较高,多功能一体化的特点,可快速、高效且准确地完成各项复杂的任务。近些年来,随着世界各国纷纷将重心转移到海面上,大型航母由于体积过大,机动性差而不再具有优势,而无人水面艇由于其灵活快速,目标较小越来越受到重视。上世纪90年代,世界各国纷纷对水面无人艇进行研究,且在一些领域取得了重大的突破。目前大部分无人艇都是运用于军事领域中,但随着时间的推移,可以预见到水面无人艇将在军事领域与民用领域中发挥发挥很重要的作用。在2007年,美国海军及相关单位制定了《海军无人水面艇总体规划》,对无人艇的相关功能、要求及特点都进行了界定,随着该计划的提出,无人水面艇作为无人平台需要高度的一个自动化水平,使操纵人员操纵无人艇时变得更加方便。另外该计划对无人艇在军事领域中所需完成的任务做了如下概括:反水雷战,反潜战,海事安全,水面作战,支持特种部队作战,电子战,支持海上拦截。目前我国无人艇技术仍然相对落后,相对于一些发达国家存在较大差距,因此对水面无人艇展开实用性的研究十分有必要。
作为无人艇的最关键技术之一,智能避碰是指无人艇在自主航行时能够自动躲避静态障碍物与动态障碍物。智能避碰研究在理论与应用上都具有重大意义,目前我们需要不断探索新的控制方式与理论,设计一种合适的避碰算法,有效的实现智能避碰。本文通过对相关算法进行整理分析,设计了一种有效且简便的控制方式来实现无人艇的避碰功能。
1.2国内外研究现状与研究水平
目前,在无人艇研究方面,丰厚的财力支持与先进的技术方案使美国在世界范围内都取得了领先,在许多方面实现了重大突破,多种先进的无人艇已经投入了实际使用。同时,以色列,新加坡,日本等国家也有实艇的投入与研究。以色列因为地理位置处于沿海位置,而且曾经遭受过海上袭击,因此以色列对海上防御十分重视,沿发了使用无人艇来执行人员登船前检查的任务。SPARTAN SCOUT 水面无人艇是具有功能模块化,可以执行多项任务功能的高速水面无人艇,由美国海军水下作战中心联合公司研制开发。“C-Enduro”系列水面无人艇于2014年由英国着手研发,它的主要特点是续航能力较长,因为它的电力驱动能源来源于太阳能帆板、风力发电机以及柴油发电机。另外2010年由美国研制的“食人鱼”水面无人艇主要用来在军事领域上完成海岸巡逻,搜救反潜等功能。目前各国已投入使用的无人艇见下表1.1。
表1.1 各国水面无人艇参数表
艇名 | 生产国 | 生产时间 | 功能 |
海上猫头鹰 | 美国 | 1993 | 雷区侦查,海区监视,海上拦截 |
斯巴达侦察兵 | 美国 | 2002 | 反水雷战,航道清扫,港口搜索 |
幽灵卫士 | 美国 | 2003 | 海上警戒与防护 |
海上斗士 | 美国 | 2005 | 扫雷,反潜作战 |
保护者 | 以色列 | 2003 | 情报监视,兵力保护,反水雷战 |
海星 | 以色列 | 2005 | 监视侦查,反水雷战,电子战 |
FDS-3 | 法国 | 1995 | 半潜式反水雷艇 |
OT-91 | 日本 | 2005 | 海上情报侦查,反水雷 |
食人鱼 | 美国 | 2010 | 海岸巡逻,搜救反潜 |
对于上述的无人艇,其中主要可分为两类,分别以“斯巴达勇士”水面无人艇与“保护者”水面无人艇为代表,如图1-1,图1-2所示。其中“斯巴达勇士”号无人艇是美国海军第一批进行研制的无人艇,其中艇长7米。宽为3米,排水量为两吨,可持续工作八个小时。作为2003年就开始研发的无人艇在技术上已经趋近与成熟,能根据事情航行情况以及需求按照模块化来实现相关功能。目前该无人艇已经在中东等国家完成了诸多任务,能够很好地实现反水雷战,航线清扫,港口搜索等功能。“保护者”号无人驾驶艇由以色列拉斐尔武器发展局开发。它基于一艘9米长的刚性充气船,喷射水速度超过30节,最大运载载荷为1000公斤。它的传感器负载主要为导航雷达和“Tolaiite”光学系统。“Tolaiite”系统是一种多传感器光电子负载系统,包括第三代前视红外传感器(8至12微米)、黑白/彩色电荷耦合器件(CCD)相机,视觉安全激光测距仪,高级相关跟踪器和激光指针(选项)等,有手动和自动两种方式,在白天、夜晚和恶劣天气条件下完成观测和目标指示。“保护者”号无人水面艇主要装备“微型台风”武器系统。该武器系统基于拉斐尔武器研制机构的台风遥控稳定武器系统,可以使用12.7毫米机枪或40毫米自动榴弹发射器。一个30毫米的枪也可以安装在吨位稍大的无人艇上。此外,该系统还配备了自动火控系统和日夜两用摄像机,形成一个完整的无人作战系统,可由数十英里外的沿海控制站或海上指挥平台远程指挥,并执行白天和晚上的操作任务。


以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: