旋转倒立摆的起摆与自平衡控制策略毕业论文
2020-04-15 18:08:47
摘 要
倒立摆系统的主要特点为单输入多输出,强耦合,非线性和绝对不稳定,对其研究会涉及控制领域的一些问题,如非线性问题、镇定问题。因其控制效果比较直观,因此常将其作为研究和验证各种控制方案的一种很典型的实验平台,所以对其研究仍发挥着重大的作用。
论文先介绍了倒立摆系统的研究背景、意义和研究现状,当前主流的研究方法,包括模糊控制,线性二次最优控制,神经网络控制和PID控制。接着对倒立摆系统进行了综合概述,叙述了倒立摆的分类、特性和工作原理,为后期的实际打下了理论基础。然后利用Lagrange方程建立了数学模型,分析了系统的稳定性,能控能观性。
最后从实物倒立摆的结构和起摆原理入手,决定采用双PID的控制策略,分别实现摆杆角度和连杆位置的目标控制。通过MATLAB/Simulink搭建倒立摆的仿真模型,结果证明双闭环PID控制器是切实可行的。然后在Keil软件中编写数字PID控制器,并把此应用于以STM32F106控制器为核心的旋转倒立摆中,根据实物旋转倒立摆的运作情况,不断的调试程序,以获得最优的控制性能,即倒立摆起摆时间快,稳摆效果好。
关键词:倒立摆系统 Lagrange方程 PID控制 MATLAB仿真
Abstract
The main features of rotating inverted pendulum system are strong coupling, absolute instability. The study will involve some problems in the control field, such as the nonlinear problem, stabilization problem. Inverted pendulum system is often used as a typical experimental platform to study and verify various control schemes because its control effect is intuitionistic, so it still plays an important role in its research.
This thesis first introduces the research background and significance and , including neural network control and PID control. Then a comprehensive overview of it is put into effect, and the classification of the inverted pendulum, the characteristics and working principle of the inverted pendulum are introduced, laying a solid basis for the later control research. Then can use Lagrange equation to build its model and analyses the stability and controllability.
Finally, after analyzing the inverted pendulum system, it is decided to use the double PID control strategy to control the swing rod angle and connecting rod position of the inverted pendulum. The simulation model of inverted pendulum is built by MATLAB/Simulink, providing double PID controller is feasible. Then the digital PID controller is written in Keil software and applied to the rotating inverted pendulum with STM32F106 controller as the core. According to the operation of the rotating inverted pendulum, the optimal control performance can be obtained by constantly debugging the program, that is, the swing time of the inverted pendulum is fast and the effect of stabilizing the pendulum is good.
Key Words: inverted pendulum; Lagrange equation; PID control;
MATLAB simulation
目录
第一章 绪论 2
1.1 倒立摆系统的研究背景与意义 2
1.2 倒立摆系统的研究现状 3
1.3 本课题研究的主要内容 4
第二章 倒立摆系统的概述 6
2.1 倒立摆的分类 6
2.2 倒立摆的组成与结构 8
2.3 倒立摆的特点与工作原理 9
2.3.1 倒立摆的特点 9
2.3.2 倒立摆的工作原理 10
2.4 本章小结 10
第三章 旋转倒立摆系统的建模与性能分析 11
3.1 拉格朗日方程简介 11
3.2 倒立摆系统的数学模型推导 11
3.3 旋转倒立摆系统的性能分析 15
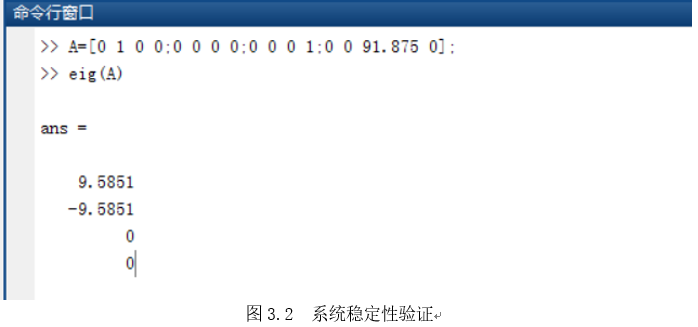
3.3.1 稳定性分析 15
3.3.2 能控性分析 16
3.3.3 能观性分析 17
3.4 本章小结 17
第四章 基于PID算法的起摆与稳摆控制 18
4.1 PID控制概述 18
4.1.1 工作原理 18
4.1.2 数字PID 19
4.2 PID控制器参数的整定方法 19
4.3 PID控制器的设计及MATLAB仿真 20
4.4 PID控制器的STM32程序实现 23
4.4.1 倒立摆系统的控制方案 23
4.4.2 旋转倒立摆系统的起摆与稳摆控制 25
4.4.3 程序的调试与运行结果 26
4.5 本章小结 29
第五章 总结与展望 30
5.1 课题总结 30
5.2 课题展望 30
致谢 31
参考文献 32
附录 34
第一章 绪论
1.1 倒立摆系统的研究背景与意义
倒立摆系统,比如小米平衡车、直立行走机器人,卫星姿势控制和航空对接等。倒立摆系统是一个典型的非线性、高阶次、多变量、强耦合和绝对不稳定的系统[],许多抽象的控制概念如系统的鲁棒性[2]和快速性[3]都可比较反映出来。这些特性很有价值,所以倒立摆系统常被用来作为各种控制理论研究。
实践是检验真理的唯一标准,任一控制理论和控制策略是否正确,在实际应用中是否可行,都离不开控制模型对其验证。倒立摆系统按级数可以划分为甚至多级倒立摆[4],摆杆数量越多,控制难度越大,因此常用倒立摆系统检验控制算法的优劣[5]。研究可分为两方面,一方面可以验证控制理论的正确性和控制算法的优劣,另一方面还能将研究倒立摆系统过程中所涉及的力学、电学和数学这三门学科结合起来加以综合应用。倒立摆系统因其复杂性和极具挑战性,所以广受控制领域研究人员的青睐与重视。
倒立摆系统作为连接控制理论与实际应用的桥梁,已经渗透到人类生产生活的各个领域,并发挥着不可或缺的作用,具有十分重要的工程意义。由于倒立摆系统自身的性能与飞行器、机器人[6]等十分接近,所以它的稳定性控制在实际中有众多应用,比如在双足机器人行的平衡控制[7]、卫星飞行中的姿态控制、海上钻井平台的稳定控制[8]等中都广为应用。经过许多研究学者的不懈努力,已经通过倒立摆系统研究并验证了许多控制理论,而且取得了许多研究成果。由此可见,对倒立摆系统的研究仍然是一个十分热门的课题[9],仍值得我们去不断地探索与发现。
1.2 倒立摆系统的研究现状
大约二十世纪50年代中后期,首个实物倒立摆被发明出来,其后,不计其数的研究人员前仆后继地对倒立摆进行了比较系统的理论研究和实物控制。从最初人们对倒立摆系统的研究到如今将近70年的岁月里,倒立摆系统因其自身的特性,使得众专家学者都把倒立摆作为研究控制策略的理想实验平台,人们对倒立摆系统的研究始终没有停下过脚步。古往今来,广大专家学者对倒立摆系统研究的深度和广度不断地加大,于是诞生了一个接一个的控制理论和控制方法,比如LQR控制[10],神经网络控制[11],经典PID控制[12]。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
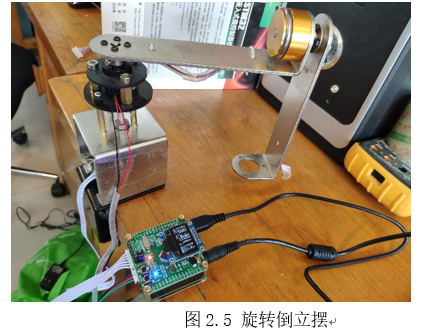
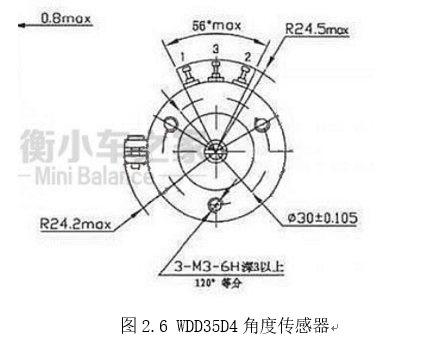
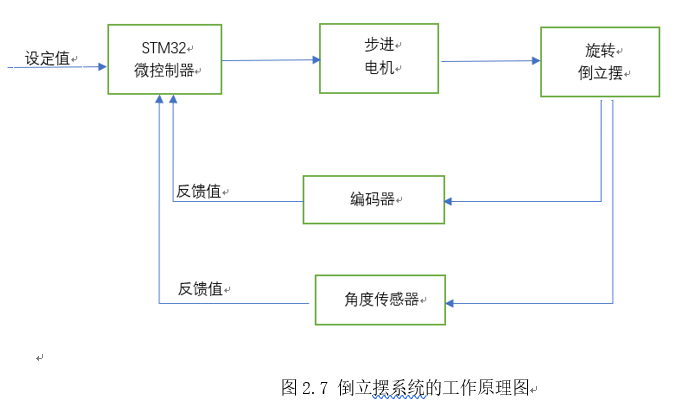
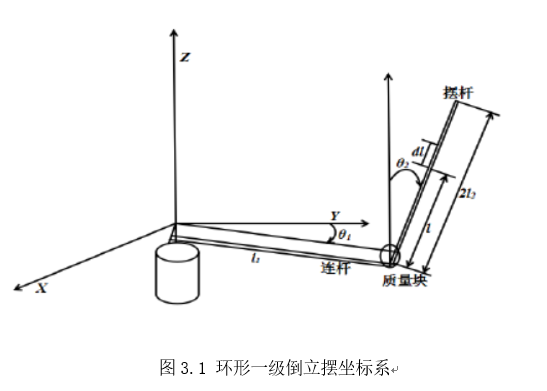
相关图片展示: