无人机的视觉跟踪控制毕业论文
2020-04-15 18:09:09
摘 要
近些年来,运动目标的识别与跟踪技术迅猛发展,在许多领域里发挥着至关重要的作用。此外,四旋翼无人机的兴起受到了国内外学者的广泛关注。以无人机为载体的目标识别与跟踪是一项崭新的技术,它的发展对军事、警用、民生方面都有着重大影响。
本文首先介绍了四旋翼无人机的构成、飞行原理、坐标系的定义、传感器以及用于传感器数据处理的卡尔曼滤波器。其次对图像处理的基本步骤进行了介绍和实验分析。接着分析比较了目标检测算法中帧间差分法、背景差分法以及光流法的优缺点,根据本课题的实际情况提出了一种绿球检测算法。最后,利用四旋翼无人机实验平台完成了目标跟踪实验,实验结果表明绿球识别算法以及姿态的双闭环PID控制可以有效的跟踪绿球。
关键词:无人机; 目标识别; 目标跟踪; 图像处理
Abstract
In recent years, the recognition and tracking technology of moving targets has developed rapidly and played a vital role in many fields. In addition, the rise of quadrotor drones has Target recognition and tracking with drones as a carrier is a brand-new technology, and its development has great significance for military, police, and people's livelihood.
Target recognition and tracking with drones as a carrier is a brand-new technology, and its development has great significance for military, police, and people's livelihood.
This paper first introduces the composition and flight principle of the UAV, definition of coordinate system, sensors and Kalman filter for sensor data processing. Secondly, the basic steps of image processing are introduced and analyzed. Then the advantages and disadvantages of the inter-frame difference method, the background difference method and the optical flow method in the target detection algorithm are analyzed and compared. According to the actual situation of the subject, a green ball detection algorithm is proposed. Finally, the target tracking experiment was completed using the quadrotor UAV experimental platform. The experimental results show that the green ball tracking algorithm and the double closed-loop PID control of the attitude can effectively track the green ball.
Keywords: UAV; target recognition; target tracking; image processing
目录
摘 要 I
Abstract II
目录 III
第一章 绪 论 - 1 -
1.1研究意义及应用 - 1 -
1.2国内外研究现状 - 1 -
1.2.1 移动目标视觉识别技术 - 2 -
1.2.2 移动目标追踪技术 - 2 -
1.2.3自主飞行决策与避障技术 - 3 -
1.2.4无人机视觉感知与导航 - 3 -
1.3研究内容及章节安排 - 4 -
第二章 四旋翼无人机介绍 - 6 -
2.1四旋翼无人机的结构 - 6 -
2.2坐标系定义 - 6 -
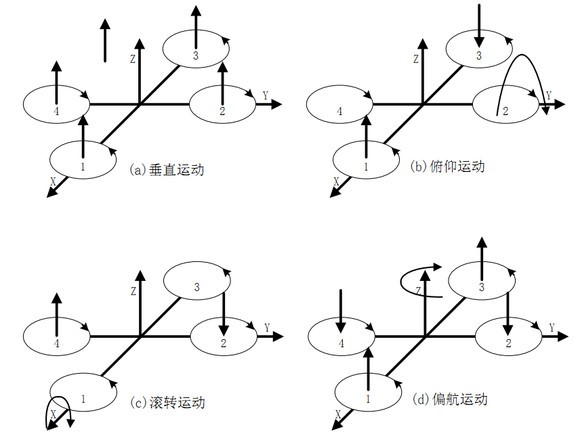
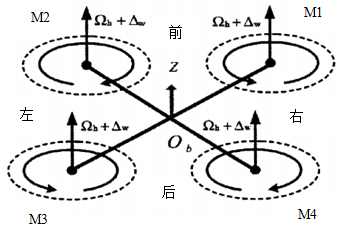
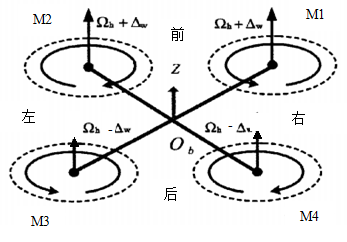
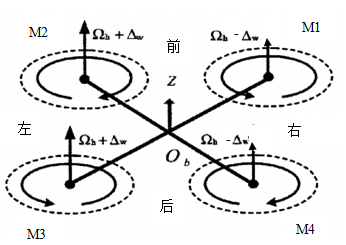
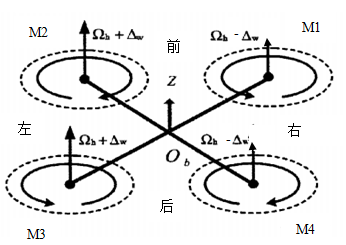
2.3四旋翼无人机的飞行原理 - 7 -
2.4四旋翼无人机的传感器 - 10 -
2.4.1传感器的组成 - 10 -
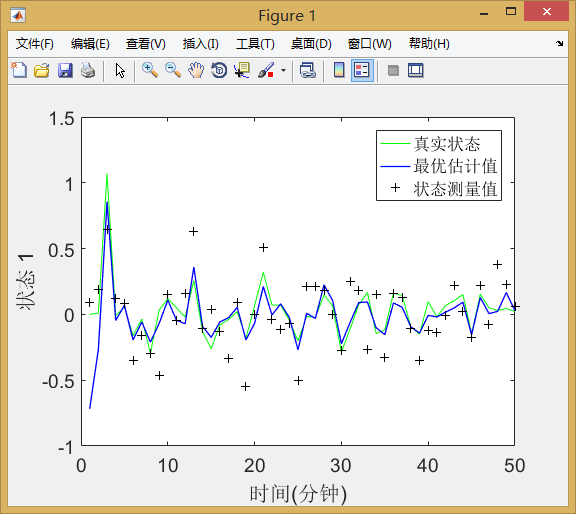
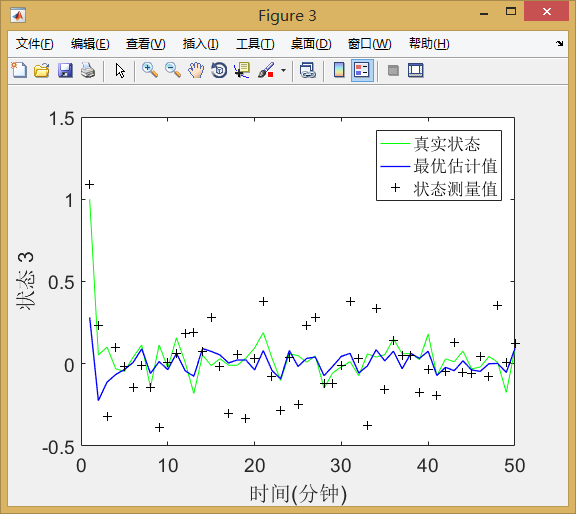
2.4.2传感器的数据处理 - 10 -
第三章 视频图像处理技术 - 12 -
3.1 色彩空间 - 12 -
3.1.1色彩空间RGB - 12 -
3.1.2色彩空间HSV - 12 -
3.1.3色彩空间YCbCr - 12 -
3.1.4 RGB转换为YCbCr - 13 -
3.2图像二值化 - 13 -
3.3消除图像噪声 - 14 -
3.3.1均值滤波 - 14 -
3.3.2中值滤波 - 14 -
3.3.3双边滤波 - 15 -
3.4形态学操作 - 15 -
3.4.1腐蚀与膨胀 - 15 -
3.4.2开运算与闭运算 - 16 -
第四章 目标检测 - 18 -
4.1帧间差分法 - 18 -
4.2背景差分法 - 19 -
4.3光流法 - 20 -
第五章 系统实现与跟踪实验 - 24 -
5.1四旋翼平台 - 24 -
5.2软件实现 - 24 -
5.3跟踪实验 - 27 -
第六章 总结与展望 - 31 -
6.1工作总结 - 31 -
6.2未来展望 - 31 -
参考文献 - 32 -
致谢 - 35 -
第一章 绪 论
1.1研究意义及应用
近年来,运动目标的识别与追踪技术迅猛发展,在许多领域内发挥着无可替代的作用。另一方面,四旋翼无人机因为结构简单、机动性强,所以逐渐受到国内外学者的关注与研究,以四旋翼无人机为载体的各项科研随之展开。在目标识别与追踪方面,国内外科研机构与学者们对其展开了丰富的研究和探索。目前,在这一领域也已出现了很多的学术理论和科研成果。但是以无人机为载体的目标识别与追踪却是一项崭新的技术,逐渐成为众多学者开展研究的焦点。地面目标如果是机器人等其它移动的智能体,以无人机为载体的目标识别与追踪则代表了另一项研究热点:空地协同。空地协同在当今民生、军事、灾难救援等领域有着广泛的应用,而空地协同自主化、智能化则是这一领域新的研究目标和方向。以四旋翼无人机为载体,实现对运动目标的识别与追踪,并且具有避障的功能,开辟了空中机器人技术的新天地。四旋翼无人机可以进行运动目标的追踪、确定位置的悬停等,有着极其重要的研究意义与应用前景。以前的四旋翼无人机通过GPS信号进行定位,然而在很多应用场合中,如:室内、森林等,无法获得GPS信号,这严重限制了四旋翼无人机的应用。无人机视觉识别与移动追踪是环境信息的感知、数据的融合、目标识别、飞行控制、远程通信等多项技术的融合,该技术不仅可以为无人机自主飞行的决策提供辅助的信息,还能够极大程度的拓展无人机的终端应用。随着各项关键技术的快速发展与应用,无人机视觉识别与移动追踪技术势必会在消防救援、安保反恐、追踪监控、协助作战等多个领域发挥重要作用。
军事方面:该系统能够从狭小地区上放飞、在复杂空中情况下灵活机动的完成低空的侦察任务,监视战场进行伤亡评估等;警用方面:可以监视犯罪分子的活动,还可以完成缉毒和反走私目标;民用方面:主要应用于自然灾害后的抢险工作,比如对河堤、水坝等地方进行监控,还可以实现对灾情的监控,可用于空中监视城市的环境以及交通状况,还可用在地质环境的监测上。
1.2国内外研究现状
1.2.1 移动目标视觉识别技术
运动目标视觉识别技术是基于视觉辨识原理,对连续的图像进行初步的图像处理并根据识别算法与跟踪算法分析目标的行为及其动作,完成对目标的更高级的任务。视觉辨识技术是通过将外界信息转化为数字量,并完成数据信息的采集、数据后续的处理及图像分析,使机器人感知到外部世界的信息。当前,世界上最先进的是 双目立体识别技术为无人机移动跟踪任务中的实时立体图像的传回提供保障,也为进一步精准打击目标提供精确的位置支持。牛津大学Helble H[1]等研制了一套无人机视觉跟踪系统,命名为牛津空中跟踪系统。该系统具有目标区域扫描、地理定位、3D 路径规划和目标轨迹预测功能,并通过一架小型无人直升机对地面目标进行视觉跟踪验证。这套系统通过重启目标搜索策略解决了移动目标丢失后的重新快速锁定问题。昆士兰科技大学Hinas A[2]等提出了一种基于OODA( 观察、定位、决策和行为) 循环的目标检测与扫描算法,用于多旋翼无人机搜寻并识别地面目标。该系统通过四旋翼无人机10 -4000m 高度的多次目标识别实验进行验证,无人机通过定位、下降和盘旋三个阶段对目标进行视觉识别。德克萨斯农工大学的Jakobsen[3]等研究了一种无人机路径规划的机器学习算法。该算法基于增强学习原理,采用无人机机载不平衡固定云台装载摄像机的方式,对移动地面目标进行视觉跟踪,确定无人机飞行路径的离线控制策略,使摄像机在无需人工操控时跟踪目标,并对地面固定、线性和随机移动目标进行仿真实验。文中提出的蒙特卡洛结果表明,学习策略能够跟踪静止和具有路径扰动的移动目标。Jakobsen设计了分层控制算法以解决无人机在追踪运动目标时所出现的飞机抖动问题。Dobrokhodov[4]为了解决固定翼无人机对移动目标的追踪问题提出了一种针对无人机云台的跟踪器。英国拉夫堡大学OhH[5]等提出了一种基于矢量场制导的方法,通过定义一个可变对峙追踪轨道,利用无人机群对移动目标群协同对峙跟踪,该方法主要解决无人机追踪多地面目标时的视域范围问题。
双目立体识别技术为无人机移动跟踪任务中的实时立体图像的传回提供保障,也为进一步精准打击目标提供精确的位置支持。牛津大学Helble H[1]等研制了一套无人机视觉跟踪系统,命名为牛津空中跟踪系统。该系统具有目标区域扫描、地理定位、3D 路径规划和目标轨迹预测功能,并通过一架小型无人直升机对地面目标进行视觉跟踪验证。这套系统通过重启目标搜索策略解决了移动目标丢失后的重新快速锁定问题。昆士兰科技大学Hinas A[2]等提出了一种基于OODA( 观察、定位、决策和行为) 循环的目标检测与扫描算法,用于多旋翼无人机搜寻并识别地面目标。该系统通过四旋翼无人机10 -4000m 高度的多次目标识别实验进行验证,无人机通过定位、下降和盘旋三个阶段对目标进行视觉识别。德克萨斯农工大学的Jakobsen[3]等研究了一种无人机路径规划的机器学习算法。该算法基于增强学习原理,采用无人机机载不平衡固定云台装载摄像机的方式,对移动地面目标进行视觉跟踪,确定无人机飞行路径的离线控制策略,使摄像机在无需人工操控时跟踪目标,并对地面固定、线性和随机移动目标进行仿真实验。文中提出的蒙特卡洛结果表明,学习策略能够跟踪静止和具有路径扰动的移动目标。Jakobsen设计了分层控制算法以解决无人机在追踪运动目标时所出现的飞机抖动问题。Dobrokhodov[4]为了解决固定翼无人机对移动目标的追踪问题提出了一种针对无人机云台的跟踪器。英国拉夫堡大学OhH[5]等提出了一种基于矢量场制导的方法,通过定义一个可变对峙追踪轨道,利用无人机群对移动目标群协同对峙跟踪,该方法主要解决无人机追踪多地面目标时的视域范围问题。
1.2.2 移动目标追踪技术
移动目标检测的研究重点是在外部干扰环境中区分背景与目标,如环境光照亮度变化、阴影遮蔽、无人机高速运动及晃动等干扰。移动目标的追踪也是一项极富挑战性的技术,追踪目标运动轨迹的不确定性、移动目标场景模式的改变、移动目标特征的消失或遮蔽等都为目标追踪带来技术上的难点。移动目标检测与追踪技术主要由背景模型建立、图像分离分割、目标检索与追踪、目标行为理解分析、数据传输、视觉系统构建等构成。英国布里斯托大学Greatwood C[6]等人提出了一种考虑视觉传感器并行特性的地面目标跟踪视觉控制策略,四旋翼无人机跟踪一辆双摆混乱轨迹的汽车,该汽车具有不可预测的运动轨迹和加减速行为。实验结果表明,该跟踪算法能够在目标可见性较短的时间内,快速重新获取并跟踪目标,实现高速率图像处理,具有极强的视觉敏感度。埃及尼罗大学Siam[7]等提出了一种基于空间聚类的被跟踪目标检测算法,使用最小中值二乘估计法检测图像的孤立点特征,该策略主要目的是实现无人机对多移动目标的检测与跟踪。加拿大多伦多大学Zhang[8]等提出了一种多架固定翼无人机对地面不合作移动目标的协同追踪方案。多架固定翼无人机形成一个以虚拟无人机为中心的等边三角形编队,在移动目标周围进行圆周绕飞追踪。美国加利福尼亚大学的Quintero SAP[9]等提出了追踪具有地面规避动作车辆的方案,两架固定翼无人机利用模型预测控制和移动视界估计方法,同时计算出状态估计值和最优控制量,协调两架无人机与追踪目标间的距离。
1.2.3自主飞行决策与避障技术
无人机在跟随被追踪目标运动的同时,应具备自主避障及飞行决策能力。葡萄牙波尔图大学Pedro A[10]等人提出了一种基于李雅普诺夫的移动路径跟随控制器和路径生成算法,使无人机在追踪目标时具备基本的飞行决策与避障功能,并给出了算法的收敛性和性能评价方法。该控制规率通过ANTEX-X02型固定翼无人机在葡萄牙Ota空军基地进行验证, 英国拉夫堡大学OhH[11]等提出了一种基于非线性模型预测控制方法的无人机路径规划算法,该算法根据道路地图预测被追踪目标移动趋势并规划无人机可行路径,以辅助无人机追踪地面移动车辆。该算法主要解决了道路约束条件下的非线性问题,提出了良好的预测性能,该方法的可行性通过城市交通中真实汽车轨迹数据的数值模拟进行验证。
1.2.4无人机视觉感知与导航
国内的研究机构也对无人机导航表现出浓厚兴趣。天津大学的古训等人[12]选用激光雷达作为机载传感器,并结合了机载惯性导航单元,在现有的二维位姿估计算法的基础上,设计了一种无人机三维位姿估计新算法。徐超等人[13]提出了一个滤波器模型,它将无人机与地面坐标作为状态方程,视觉系统获得的信息作为观测量。北京理工大学于剑桥等人[14]将无人机编队飞行的路径规划中加入了人工势场法,通过路径规划模型建立“虚拟目标位置”和“虚拟刚体速度”,依靠PID控制器实现对无人机编队飞行的控制。如今对四旋翼无人机的研究主要集中在飞行器控制器设计,基于激光或者视觉的自主导航,目标识别及其追踪等方面。近些年,随着图像处理科技的不断进步以及控制器设计能力的提高,四旋翼无人机愈加智能化、自主化、多功能化,因此被越来越广泛的应用到民生、军事、科技等众多领域[15]。放眼未来,四旋翼无人机还要在避障飞行、多级编队协同控制技术、自动控制等方面进一步发展,在増强其各方面性能的同时,提高其自主能力。
1.3研究内容及章节安排
本文主要研究了无人机的视觉跟踪控制,对图像处理每个步骤的各个方法进行了分析和比较,选择了最佳图像处理方法。分析比较了各个检测算法的优缺点,提出了一个针对本课题的绿球检测算法,研究了卡尔曼滤波器在无人机姿态估计中所起的作用,最后搭建了实验平台,验证了跟踪效果。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: