汽车主动悬架系统的鲁棒控制技术研究毕业论文
2020-04-15 20:41:19
摘 要
我们生活当中的路况并不是很平整的,目前很多车辆的悬架系统性能或多或少有一定的局限性,这会让长时间驾驶车辆的驾驶员总是处在较强的振动中,由于路面不平整对驾驶员的身体会产生不同程度的影响,这样就会对驾驶员造成不同程度的影响,严重的还会损害驾驶员的身体健康,从而产生一些疾病。因此,我们通过研究汽车悬架系统,以尽可能减少驾驶员受到的振动,一般,我们会对汽车座椅悬架系统进行隔振,通过使用适当可行的控制方法对悬架的运动进行智能控制,最大程度上减少由于地面凹凸不平所引起的振动,从而削弱由地面到底盘以及座椅传动到人身体上的振动,给人们提供舒适的驾驶环境。悬架是现代车辆极其重要的部件之一,它是连接车身和弹性元件的中心枢纽,它起到传动车架与弹性元件之间的力与力矩的作用,以达到减轻凹凸路面引起的振动的目的。因此,使用不同策略控制车辆主动悬架的技术越来越得到人们的青睐。主动悬架感知不平路面对车架和弹性元件的影响并对此做出适当的反馈和调节,实现减缓振动的功能,给人们提供一个特别舒服的乘坐感觉,这样不仅可以提高驾驶安全,为交通安全做出巨大贡献,也为我们的生活提供了便捷。本论文以车辆主动悬架系统作为研究对象,选择质量块-阻尼器-弹簧系统作为模型,分析其结构特点并建立数学模型;然后根据控制要求设计闭环系统;最后对该系统进行。为了提升车辆行驶的稳定性以及应对来自路面振动的能力,将使用MATLAB工具基于数学模型建立合适的模型,使用鲁棒控制的策略对系统设计控制方案,并得出该系统基于干扰的响应曲线,并通过比较的方式得出最优控制为较好的控制方法。现代人们对车辆座椅的要求精益求精,这需要我们不断地研究和尝试,因此使用MATLAB等软件的计算机仿真方法,是非常实用并且非常经济的研究方法,可以便捷的修改模型,修改参数以及控制策略,这将不仅为我们对主动悬架控制的研究节约了大量的时间,并且节约费用,显而易见,使用MATLAB软件仿真的研究方法将得到广泛应用。
关键词:汽车主动悬架,鲁棒控制,H∞控制器
Abstract
We live among the road is not very smooth, a great number of more or less the performance of the vehicle suspension system has some limitations, it makes for a long time driver driving the vehicle is always in strong vibration due Uneven road surface will have different effects on the driver's body, which will affect the driver to varying degrees, and will seriously damage the driver's health and cause some diseases. Therefore, we study the car suspension system to minimize the vibration of the driver. In general, we will isolate the car seat suspension system and intelligently control the movement of the suspension by using appropriate and feasible control methods. , to minimize the vibration caused by the unevenness of the ground, thereby weakening the vibration from the ground to the chassis and the seat transmission to the human body, providing people with a comfortable driving environment. Suspension is one of the most important components of modern vehicles. It is the central hub connecting the body and the elastic components. It acts as a force and moment between the transmission frame and the elastic components to reduce the vibration caused by the bumpy surface. Therefore, the technology of using different strategies to control the active suspension of vehicles has become more and more popular. The active suspension senses the influence of uneven road surface on the frame and elastic components and makes appropriate feedback and adjustment to achieve the function of mitigating vibration, providing people with a particularly comfortable ride feeling, which not only improves driving safety, but also Traffic safety has made tremendous contributions and has provided convenience for our lives. In this thesis, the vehicle active suspension system is taken as the research object, the mass-damper-spring system is selected as the model, the structural characteristics are analyzed and the mathematical model is established. Then the closed-loop system is designed according to the control requirements. Finally, the robust control technology is applied to the system. the study. In order to improve the stability of the vehicle and to cope with the vibration from the road surface, the MATLAB tool will be used to establish a suitable model based on the mathematical model, and the control scheme will be designed using the robust control strategy, and the interference-based response curve of the system will be obtained. And by comparison, the optimal control is a better control method. Modern people's requirements for vehicle seats are constantly improving, which requires us to constantly research and try. Therefore, computer simulation methods using software such as MATLAB are very practical and very economical research methods, which can easily modify the model, modify parameters and control strategies. This will not only save a lot of time for our research on active suspension control, but also save costs. Obviously, the research method using MATLAB software simulation will be widely used.
Keywords: automotive active suspension, robust control, H∞ controller
目录
Abstract 2
第一章 绪论 1
1.1汽车悬架研究背景及意义 1
1.2汽车悬架种类 2
1.3汽车悬架研究现状 4
1.3.1国内研究现状 4
1.3.2国外研究现状 4
1.4鲁棒控制的概述 5
1.5研究内容 5
第二章 汽车主动悬架模型的建立 7
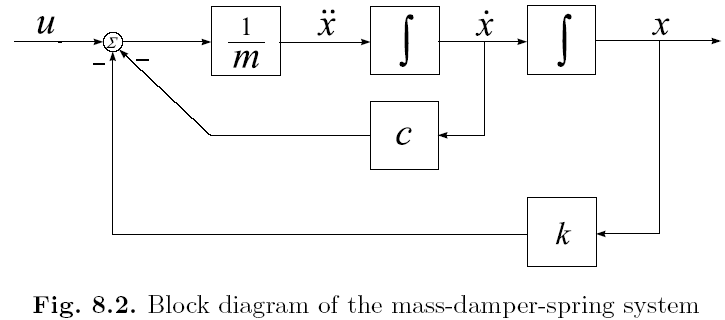
2.1主动悬架系统的动力学模型 7
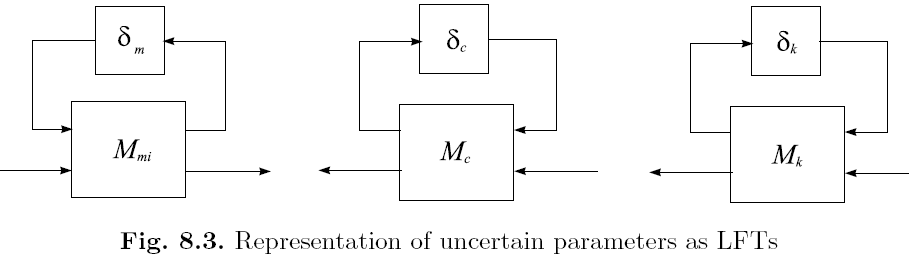
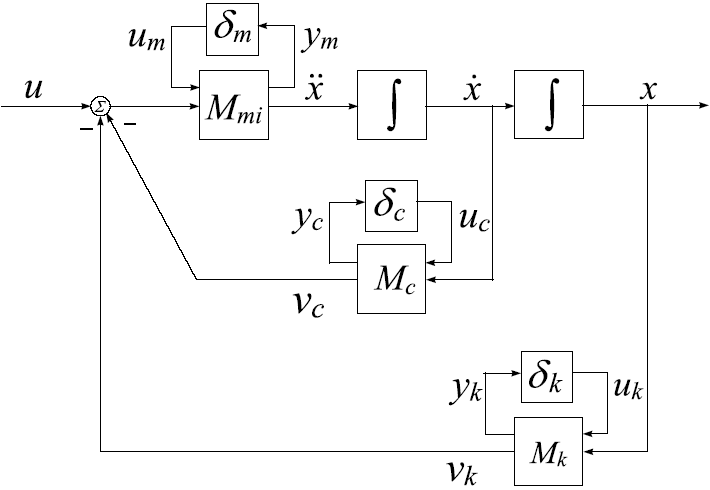
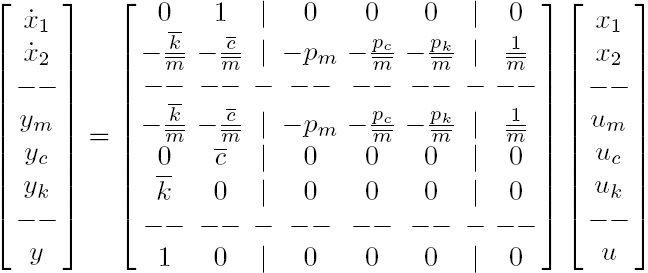
2.2系统的数学模型 8
2.3开环系统的响应 11
2.4本章小结 12
第三章 悬架系统控制器设计 13
3.1悬架系统的要求分析 13
3.2 悬架系统控制器的设计 14
3.3 次优H∞控制器的设计 16
第四章 系统性能分析 21
4.1鲁棒性能分析 21
4.2悬架系统的性能分析 22
4.3系统鲁棒稳定性分析 23
4.4结论 25
第五章 总结 28
参考文献 29
致谢 32
第一章 绪论
1.1汽车悬架研究背景及意义
由于现代控制理论备受科学界的青睐,车辆主动悬架稳定性的研究也越来越受到外界的关注。因此,对于车辆主动悬架振动的控制技术不断向前发展,得到了广泛的认可与支持。
汽车主动悬架系统是组成汽车的重要部件,对汽车在不同路面环境下的行驶状态以及车身平稳性起着极其重要的作用。由于路面情况复杂多变,随着人们物质生活水平的不断提高,人们对车辆乘坐的舒适度要求越来越高,所以对汽车主动悬架系统的性能有着极大的要求和考验,然而传统的被动悬架已经无法满足人们的要求所需,所以我们选择更为先进的主动悬架作为研究对象。汽车主动悬架控制方案决定了汽车的整体机能的好坏,在行驶过程中,不平整的路面以及恶劣的路况都会引起车身不同程度的振动,造成人们的乘坐舒适感下降,车辆平稳性变差,甚至影响车身的姿态以及行驶速度,造成一些物品运输过程中不必要的损失。与此同时,主动悬架系统对汽车油耗也有至关重要的影响,并且车室内的噪音大部分来自于车身的振动。所以,汽车悬架旨在传递轮胎与弹性元件之间的作用力,减缓凹凸路面对汽车车身的振动,使车辆平稳、安全行驶。因此,研究汽车主动悬架具有重要意义,通过研究和比较得出性能较好的悬架,对汽车座椅的稳定与舒适度至关重要。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: