基于惯性测量单元的行走运动意图识别毕业论文
2020-02-18 11:55:44
摘 要
人体行走运动意图识别一直是热门研究课题,例如对于穿戴式机器人来说,行走运动意图识别是一个重要的部分,正确的识别能够提高人机协调性。本文提出一种基于惯性测量单元的行走运动意图识别方法,并且识别结果验证了方法的可行性。
本文通过对运动模式的分类识别达到行走运动意图识别的目的,运动模式分为三个稳态部分和四个转换部分,将惯性传感器固定于大腿靠膝处,提取惯性测量单元三轴加速度和角速度以及欧拉角的最大最小值,均值,标准差作为特征值组成36维特征向量,利用支持向量机分类器对七个模式进行分类从而识别行走运动意图,利用混淆矩阵和ROC曲线对结果进行了评估。
本文的方法实现起来简单,快速,可以对行走运动意图进行较准确的识别,有利于人机交互系统更加平滑,稳定的控制。
关键词:运动意图识别;惯性单元;支持向量机;运动模式
Abstract
Human walking movement intention recognition has always been a hot research topic. For example, for wearable robots, walking movement intention recognition is an important part, and correct recognition can improve human-machine coordination. This paper proposes a walking movement intention recognition method based on inertial measurement unit. And the results identify the feasibility of the method.
This paper achieves the purpose of walking movement intention recognition by classification and recognition of sports gait, the motion mode is divided into three steady-state parts and four conversion parts. The inertial sensor is fixed on the knees of the thigh, and the three-axis acceleration, angular velocity and Euler angle of the inertial measurement unit are extracted as characteristics, with their maximum and minimum values, the mean and standard deviation being composed of 36-dimensional eigenvectors. The seven models are classified by the support vector machine classifier to identify the walking movement intentionion. The results are evaluated by the confusion matrix and ROC curve.
The method of this paper is simple and fast to implement, and can accurately identify the motion intention, which is beneficial to the smoother and more stable control of the human-computer interaction system.
Key Words: motion intent recognition;inertial unit;support vector machine;sport mod
目 录
第1章 绪论 1
1.1课题背景及研究意义 1
1.2国内外研究现状 1
1.3论文主要工作 2
第2章 惯性测量单元 4
2.1常用坐标系 4
2.2基本工作原理 5
2.3实验惯导选择 6
第3章 下肢运动信息处理 8
3.1步态数据的采集 8
3.2步态数据特征值提取 9
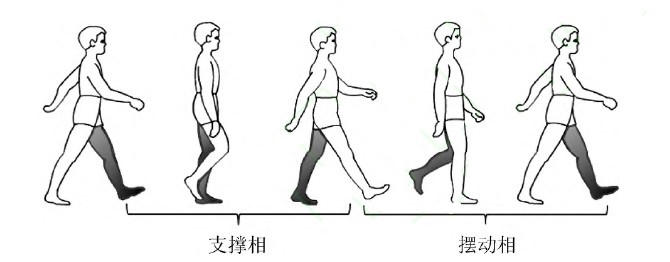
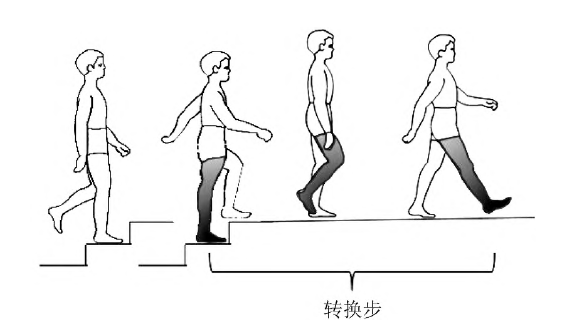
3.2.1人体步态划分 9
3.2.2特征值的选择 12
第4章 行走运动意图识别 13
4.1支持向量机原理简介 13
4.1.1线性可分支持向量机 13
4.1.2非线性支持向量机与核函数 17
4.1.3软间隔支持向量机与松弛变量 19
4.2意图识别方法 20
4.3步态分类算法参数设置 21
第5章 行走运动意图识别结果与评价 24
5.1意图识别结果 24
5.2对步态分类器的评价 26
5.2.1评价指标:ROC曲线与AUC值 26
5.2.2以分类结果绘制ROC曲线 28
第6章 总结与展望 31
参考文献 32
致谢 34
第1章 绪论
1.1课题背景及研究意义
人体外骨骼作为辅助人类运动的一种工具,将人类的运动形式与机械的强大动力合而为一,是一种人机交互智能机械装置。如果人类的思维及动作能够很好控制机械的运动,那么外骨骼能够协助人类完成一些难度较大或者无法完成的任务,甚至能够帮助身体残疾者恢复正常生活。外骨骼机器人包含着多种学科知识,例如动力学,机械工程,信息处理,控制科学,模式识别等等,其发展前景十分广阔。
关于外骨骼机器人的研究,其目的最初是用于提高士兵的背负承载能力以及行走能力,从而对士兵的作战能力有着明显提提升。士兵在面对各种复杂情况时时,体力有限,尤其在单兵作战时,根本无法携带多种武器,也无法长期负载过多执行任务。当有外骨骼的支持下,士兵能够背负更多武器以及食粮储备,在路途中外骨骼能够提供额外助力,尤其在复杂地形内,可以大大减少士兵的体力消耗,提高效率。另外,在野外科考中,外骨骼能够帮助人们携带更多物资储备,增长研究时间,扩大考察范围。在各种救援工作中,外骨骼机器人亦能帮助人们移除各种障碍,从而使得救援工作的顺利进行。随着科技的发展,后来外骨骼机器人不仅面向健康人群,更多的用来帮助残疾人士或者有障碍人士。
例如下肢假肢大大提高了截肢者在进行日常活动时的运动能力。但大多数市售的下肢假肢都是无动力性的。虽然它们被广泛使用,但它们具有不可避免的缺陷,例如更多的代谢能量消耗和不对称的步态模式。因此,与无动力性下肢假肢相比,动力性下肢假肢的研究越来越受到关注,动力假肢可以在一定时期内提供必要的动力以使运动更自然,但它们需要更复杂的控制策略和更多来自截肢者的运动信息。由于不同运动方式的控制方法不同,动力假肢应事先“知道”截肢者的运动意图,以便选择合适的参数,实现安全,流畅的控制。在理想的情况下,外骨骼机器人能够按照穿戴者的运动意图辅助穿戴者运动,与穿戴者完美结合,使穿戴者没有穿戴异物感,从而让残疾患者更加接近健康人士。此外,外骨骼机器人存在的误操作有时也会引发危险,因此,对截肢者运动意图的预测对于动力下肢假肢的控制起着重要作用。
1.2国内外研究现状
对于人体行走运动意图识别的研究,目前来说主要两个方面,一是通过机械信号例如利用惯传感器测量惯性数据,利用分类算法或者对姿态的解析来对行走运动意图进行识别,二是通过对表面肌电信(sEMG)[7]分析进行识别,通常情况下,表面肌电信号都是配合着机械信号进行分析。无论是哪个方面,大部分会涉及到分类算法,目前在分类方法上使用比较广泛的有隐马尔可夫模型,支持向量机,线性判别器,动态贝叶斯网络,二次判别分析等。
对于利用机械信号对意图进行识别方向,Varol等人[1],收集膝关节和踝关节角度和角速度,骨关节径向面力矩,脚跟脚掌前内侧的力量信号,实现了三种运动方式(站立,坐着和行走)和它们之间的过渡的识别,然而,运动意图识别存在半秒延迟。Young等人[2],提出了一种识别系统,该系统能够使用机载传感器使动力假体在水平地面,坡道和楼梯上之间进行过渡,整体识别准确率可达93.9%。Liu等人[3],根据步行速度和地形的笛卡尔乘积利用组内相关系数对意图进行识别,其传感器系统由加速度计,安装在假肢插座上的陀螺仪和安装在鞋底下方的两个压力传感器组成,其识别准确率可达95.8%。Wang等人[4],提出了一种基于实时模糊逻辑的多传感器融合地形识别方法来识别五个地形,特征通过两个三轴陀螺仪,两个三轴加速度计,两个力敏电阻器和一个计时器的融合来测量,其整体识别率可达98.74%。Chen等人[5],提出一种二级识别策略来对运动意图进行识别,利用惯性传感器对运动数据进行采集,在离线情况下对五种稳态模式(平地行走,上下楼,上下坡)和7种转换步态进行训练,在线基于当前步态对转换步态进行识别,对于转换步态都能正确识别,且在训练5小时后并未察觉系统识别性能有明显下降。
除了使用纯机械信号,表面肌电信号也常常用来进行意图识别,Hargrove等人[17],通过对几名截肢者身上采集数据,仅使用从九个残留的大腿肌肉测量的肌电信号,得到了90%左右的识别率。不仅仅可以只使用表面肌电信号,当表面肌电信号与机械信号融合用来进行意图识别时,效果也是很不错的,刘[10],将大腿,小腿惯性数据与关键部位表面肌电信号利用粒子群算法进行融合,采用隐马尔可夫模型以及支持向量机结合起来对稳定步态以及步态转换进行识别,达到意图识别的目的。Huang等人[6],使用从下肢测量的EMG信号和6-DOF测力传感器的信号来分类六种运动模式和五种运动过渡。然而,该方法仅在离线测试,并且未报告长时间使用的识别性能。长时间使用的评估对于肌电解码算法是重要的,因为它们固有地随着时间的推移而使识别精度衰减,这是由电极电导率变化,电生理变化,空间变化,用户变化引起的EMG信号的变化以及其他可能的因素引起的。
1.3论文主要工作
本论文主要有下几个方面的研究
(1).基本了解MTi惯性传感器的工作原理以及其使用方法
(2).通过对步态的识别来判断运动意图,以惯性传感器测量下肢不同运动模式的加速度,角速度等信号为基础,先进行滤波处理,除去多余噪声信号,再提取特征值组成特征向量,特征值包括最大值,最小值,以及均值方差等。
(3).针对出现频率较高的行走,上楼,下楼三种稳定步态模式,利用支持向量机进行分类,其中参数的选择利用交叉验证的方法选择最优取值。紧接着加入三种模式间的转换利用相同方法进行识别。利用混淆矩阵与roc曲线来评估识别结果
第2章 惯性测量单元
惯性测量单元(Inertial measurement unit)是一种电子装置,利用加速度计,陀螺仪和磁力计的集合数据,测量和显示其本身所受到的特定的力、角速率,有时还包括周围的磁场。惯性测量单元(IMU)通常用于机动飞行器,包括无人机(UAV)和许多其它应用:宇宙飞船,包括卫星和着陆器。
2.1常用坐标系
惯性测量单元在无论是在导航还是解析姿态等应用中,总会遇到以下几个坐标系。
1. 地心惯性坐标系
此坐标系是相对与恒星固定的坐标系,在此坐标系中,原点位于地球的质量中心,轴指向固定方向。其中,z轴沿着地球极轴方向,xy轴指向地球赤道平面内某一方向(固定恒星),构成了右手坐标系。一般用于测量和确定全球导航卫星系统(GNSS)卫星轨道。
2.地球中心地球固定坐标系
在地球中心地球固定系统中,xy平面与地球的赤道面一致,x轴指向0°经线(格林尼治子午线)的方向,y 轴指向东经 90° 的方向。通常将这些直角坐标转换为纬度,经度和高度(海拔),一般在地图上这样投影。为了进行这个转换,需要一个描述地球的物理模型,GNSS应用的地球标准物理模型是全球大地坐标系统,如图2.1,其中a=6378317m,b=6356752m。
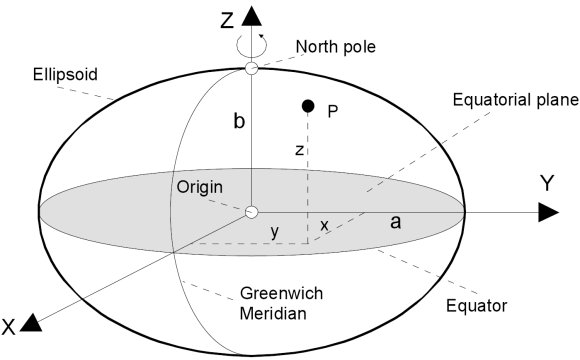
图2.1 地球中心地球固定坐标系
3.球面坐标系
又称东北天坐标系,顾名思义,x轴指向东,y轴指向北,z轴指向天。坐标原点位于导航系统中载体的中心。载体相对地球表面运动,其位置不断在发生变化,如图2.2,其中λ=经度, =经度,h=海拔。
=经度,h=海拔。
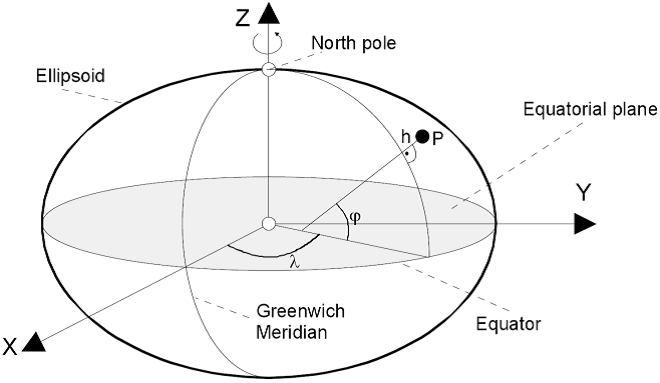
图2.2 球面坐标系
4.传感器坐标系
此坐标系的坐标原点固定在传感器,x,y,z轴分别指向固定方向。此坐标系与上述球面坐标系的转换关系可以得到姿态角。当传感器不完全与其附属的物体或车辆的轴对齐时,可以将传感器坐标系旋转到物体坐标系。
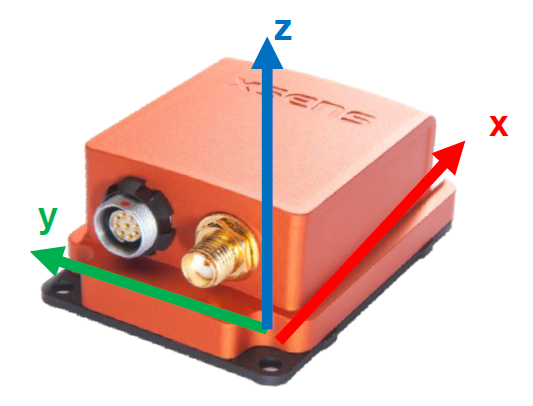
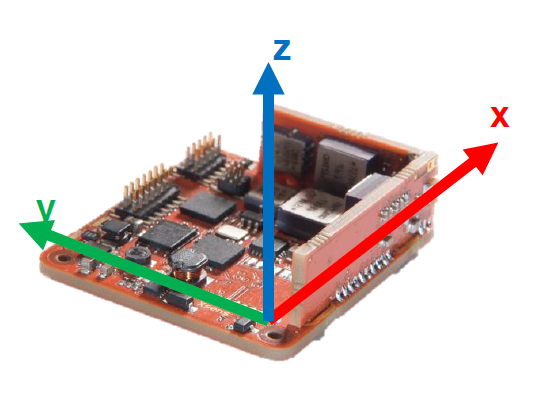
图2.3 传感器坐标系
2.2基本工作原理
惯性测量单元的工作原理是:使用一个或多个加速度感应器,探测当前的加速度速率;使用一个或多个偏航陀螺仪,检测在方向、翻滚角度和倾斜姿态上的变化。有一些惯性测量单元还同时包括磁力计,主要是用于协助校准方向漂移。惯性导航系统包含IMU角速度、线性加速度计(位置的变化);一些IMU包括陀螺仪等元素。
但使用IMU导航的主要缺点是它们通常会积累误差,包括Abbe误差。因为制导系统会不断的将检测计算出的位置结果加到原有的位置信息上,尽管在测量时的误差很小,但这些误差从一个位置点到另一个位置点不断积累,导致“漂移”,或者系统认为的所在地和实际位置的区别越来越大。位置跟踪系统(如全球定位系统(GPS))可以用来不断纠正偏移错误。
此外因为设备只能在有限的时间间隔里收集数据,IMU在工作中总是使用平均值。如果一个加速度计能够以每秒一次的频率检索加速度,设备将会认为加速度在这一秒中始终为一个值,尽管加速度在这期间可能有很大的变化。由于集成,常数误差在加速度结果中会以二次线性的速度增长。这些误差修正研究已经有很多学者完成,例如文献[8]中提出一种零速度修正方法。
2.3实验惯导选择
本次实验选择荷兰Xsens公司生产的MTi航姿系统,其内部处理器功耗低。输出的航向角没有漂移,同时提供经过较核的三维加速度,角速度以及磁场强度,而且其系统有着优良的校准系统,能够在不同运动和温度范围中进行校准和测试。

图2.4 MTi航姿系统
MTi航姿系统方向由 Xsens 卡尔曼滤波器进行计算。采用的XKF3™算法是一种经过证明的传感器融合算法,在 Xsens 及其合作伙伴的产品中都已使用。它使用速率陀螺仪、加速计和磁力计的信号来计算静态和动态移动无飘移高精确度的统计最优 3D 姿态估测。 此算法的设计可总结为一种传感器融合算法,重力(3D 加速计)和地磁场北极(3D 磁力计)的测量缓慢但无限地弥补不断增加(漂移)的由转速数据(速率陀螺仪测量的角速度)融合产生的误差。这种漂移补偿通常叫做姿态和航向基准,该系统成为姿态和航向基准系统 (AHRS)。
而且MTi航资系统能够通过usb接口与电脑相连,达到实时传输并保存的功能,用户界面如图2.5所示。

图2.5 MTi用户界面
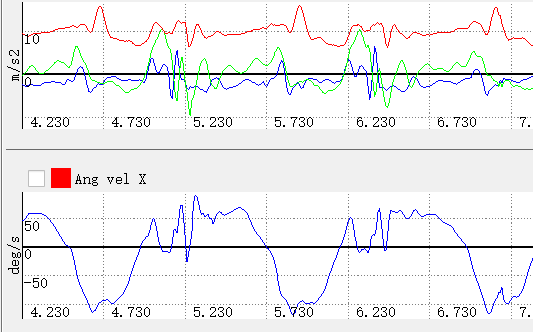
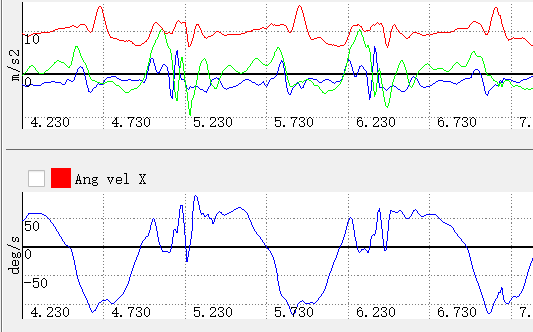
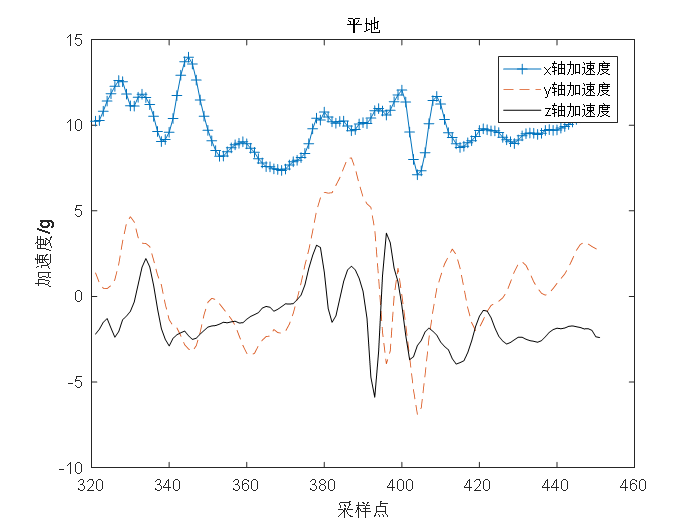
三个轴的加速度,角速度以及地磁信息能够自动形成波形,姿态以欧拉角的形式输出并可以实时观测模块姿态。对于数据输出,可以选择不同的数据以文本形式输出,刚好可以使用matlab读取数据。表2.1列出了部分可输出参数。
表2.1 部分输出参数
组别名称 | 类型名称 | XDA类型名称 |
温度 | 温度 | XDI_Temperature |
时间戳 | UTC时间 | XDI_UctTime |
数据包计数器 | XDI_PacketCounter | |
采样时间精度 | XDI_SampleTimeFine | |
粗略采样时间 | XDI_SampleTimeCoarse | |
方向数据 | 四元数 | XDI_Quaternion |
旋转矩阵 | XDI_RotationMatrix | |
欧拉角 | XDI_RulerAngles | |
角速度 | 转速 | XDI_RateOfTurn |
磁性 | 磁场 | XDI_MagneticField |
加速度 | 加速度 | XDI_Acceleration |
自由加速 | XDI_FreeAcceleration |
第3章 下肢运动信息处理
3.1步态数据的采集
有关实验所用的惯性测量单元在上一章已经介绍,下面简称为传感器,在传感器个数有限的情况下为了尽可能多地测量有用的运动信息,需要仔细选择传感器的位置。我们知道各种步态中大腿靠膝关节处的变化总是有差异的,我们可以选择在此处固定一个惯性传感器,在实验中,我们选择将传感器固定于左腿上,如图3.1。在第二章中讲到了几个坐标系的区别,这里我们将腿视为载体,用传感器测量载体的加速度。由于我们可以将传感器以我们希望的姿态固定在腿上,传感器坐标系可近似堪为载体坐标系,即传感器不同方向上的数据可以认为就是腿部的数据。

以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: