基于STM32的直流无刷电机驱动器设计毕业论文
2020-02-18 11:57:10
摘 要
近年来,随着科技技术和控制理论的发展,电机控制应用逐步成为人们关注的热门方向。无刷直流电机既继承了直流电机良好的调速性能,能够在重负载的情况下,实现均匀、平滑的无级调速,又避免了传统的有刷直流电机进行电刷摩擦换向所导致的电机接触不良、不发电等一系列问题,因此越来越受到人们的关注。
首先,在通过对相关资料的了解以后,本文介绍了无刷直流电机的研究背景和发展趋势,同时阐述了无刷直流电机的结构和工作原理,以及调速方法等。
随后,考虑到常用的DSP微处理器的功能虽然强大,但是其控制系统成本过高,而 ARM 具有高性能、廉价的特点,所以采用以STM32为核心的PID控制系统设计。根据设计要求,设计的硬件电路主要包括了以STM32芯片为核心的驱动电路、电源电路和采样电路等。软件方面主要包括主程序、中断程序和双闭环控制程序等。
最后,使用开发板实物进行PID 参数调试,优化控制性能,进行速度测试,达到理想的实验效果,验证了设计的可行性等。
关键词:无刷直流电机;PID控制;STM32
Abstract
In recent years, with the development of technology and control theory, the application of motor control has gradually become a hot direction of attention. Brushless DC motor not only inherits the good speed regulation performance of DC motor, can achieve uniform and smooth stepless speed regulation under heavy load, but also avoids a series of problems caused by brush friction commutation of traditional brushless DC motor, such as poor motor contact, non-power generation, etc. Therefore, more and more attention has been paid to it.
Firstly, after understanding the relevant information, this paper introduces the research background and development trend of brushless DC motor, and describes the structure and working principle of brushless DC motor, as well as speed regulation methods.
Subsequently, considering the powerful function of the commonly used DSP microprocessor, but its control system cost is too high, and ARM has the characteristics of high performance and low cost, so the PID control system with STM32 as the core is adopted. According to the design requirements, the hardware circuit mainly includes driving circuit, power supply circuit and sampling circuit with STM32 chip as the core. Software includes main program, interrupt program and double closed-loop control program.
Finally, the development board is used to debug the PID parameters, optimize the control performance and speed test. The ideal experimental results are achieved, and the feasibility of the design is verified.
Key words: brushless DC motor; PID control; STM32
目录
第1章 绪论 1
1.1 课题研究背景及意义 1
1.1.1 无刷直流电机国内外研究状况 1
1.1.2 无刷直流电机在工业自动化设备领域应用 2
1.2 本文的研究内容及工作安排 2
第2章 无刷直流电机的原理和结构 3
2.1 无刷直流电机组成结构 3
2.1.1 电机本体 3
2.1.2 电子换向电路 3
2.1.3 转子位置传感器 4
2.2 无刷直流电机工作原理 5
2.3 无刷直流电机数学模型 7
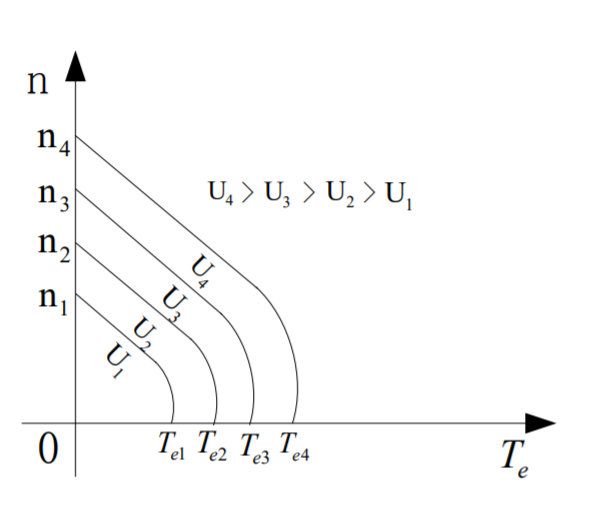
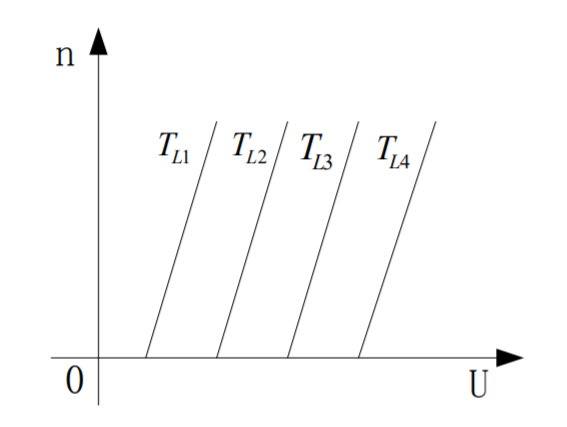
2.4 无刷直流电机的运动特性 9
2.4.1 机械特性 10
2.4.2 调节特性 11
2.5 本章小结 12
第3章 直流无刷电机控制系统设计 13
3.1 无刷直流电机基础控制结构 13
3.2 PID控制 13
3.2.1 模拟PID控制 13
3.2.2 数字PID控制 14
3.3 控制系统总体结构设计 15
3.4 系统硬件设计 16
3.4.1 主控芯片选择 16
3.4.2 电源电路设计 18
3.4.3 驱动电路设计 19
3.4.4 霍尔传感电路设计 20
3.4.5 电流采样电路设计 20
3.4.6 接口电路设计 22
3.5 本章小结 23
第4章 无刷直流电机控制系统软件设计 24
4.1 软件开发环境和应用 24
4.2 软件开发系统设计 24
4.2.1 主程序设计 24
4.2.2 中断程序设计 25
4.2.3 电流环和速度环控制程序 26
4.3 仿真结果和分析 28
4.4 本章小结 29
第5章 总结与展望 30
参考文献 31
致谢 32
第1章 绪论
1.1 课题研究背景及意义
1.1.1 无刷直流电机国内外研究状况
直流电机第一次出现于18世纪,法拉第发现电磁感应定律后,将其应用于传统直流电动机中,运用机械式换相,但是随之而来的问题是系统的可靠性较低,电机控制系统不稳定,换相时电刷容易产生火花。由于传统电机使用时存在的风险,和未能普及导致的高成本,初期电机难以进行实用化。由于工业革命的进行,社会生产快速发展,而电机产品也因此不断发展更新。考虑到传统直流电动机的缺点,从1930开始,人们试图利用电子换相来代替机械式换相,得到了一些结果。然而,当时高功率设备器件尚处于开发的初始阶段,没有找到合适的功率设备来替换机械转流,导致没能取得理想的成果。可是研究的步调没停止,到了20世纪50年代中期,世界上第一个无刷直流电机出现,美国科学家D.Harrison和其他人使用晶体管代替机械换相,成功研发出无刷直流电机。数年后,又开发出了具有霍尔传感器的无刷直流电机。时间到了1970年,随着电力电子技术和永磁材料的快速发展,产生了mosfet、gto、igbt等多种高功率设备器件,为广泛应用无刷直流电机打下了良好的基础[1]。
在过去30年中,关于异步电机的可变频率控制的研究,主要是找到控制异步电机的转矩的方法。由于调速宽、小体积、高效率、稳态速度误差小等原因,稀土类永磁无刷直流电机在速度控制领域显示了极大的优势。
无刷直流电机一方面具有有刷直流电机特性,另一方面因为是频率变化的设备,也被称为直流变频,国际公用名词是BLDCM。由于无刷直流电动机的控制技术,例如操作效率,速度准确度,和低速扭矩,优于其他逆变器,这是值得的在行业内重视。
随着技术开发的成熟和完成,无刷电机迅速发展。虽然开发时间较短,但无刷电机的运用十分广泛,广泛应用于飞机、医疗设备、产业生产、家电、电动汽车等多个领域,形成了以深圳、长沙、上海等大城市为中心的大规模产业链。在技术方面,应该继续推进产业的发展。近年来,无刷电机成为模型领域快速发展的原动力。由于生产和价格的原因,无刷直流电机在过去一直使用于航空等高要求的模型当中。而近几年,由于加工技术的快速发展,无刷电机的制造成本正在下降等,已进入所有领域的模型领域。例如电动远程控制的产业用机器人、电动汽车[2]。
1.1.2 无刷直流电机在工业自动化设备领域应用
随着工业自动化的发展,无刷电机在工厂中的应用越来越广泛。目前,高档数控加工设备的应用已逐渐取代了传统的直流和交流电机结构。此外,一些工业加工设备,如工业缝纫机、轻型印刷机、食品加工机械等也已开始普及。比较实用的工业机器人潜在的驱动控制问题也值得密切关注。在这种应用中,由于对速度、扭矩和位置控制的要求,无刷电机成为了首选。目前,世界上有100多万的机器人,而无刷电机的需求量每年增长20%以上,因此对于无刷电机有巨大的需求量。因而本文基于无刷电机在工业机器人中的应用进行研究,提出“基于 STM32 的直流无刷电机驱动器设计”的课题[3]。
1.2 本文的研究内容及工作安排
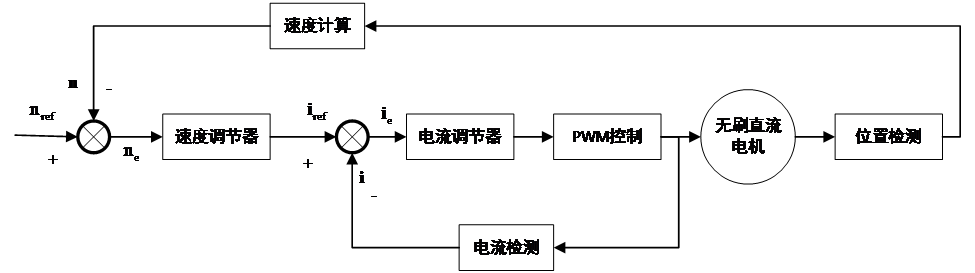
本文在无刷直流电机双闭环控制策略的基础上,运用传统PID控制对无刷直流电机控制系统的速度控制器进行改进和优化,采用基于STM32芯片的控制系统对所设计的程序和功能进行验证,最后对所得转速信息进行分析。
共有5个章节组成:
第一章:简单介绍了无刷直流电机的研究背景和意义,以及国内外的一些发展现状,给出了本文所要研究的方向即基于工业机器人的基础,同时对于本文的研究工作做了简略介绍。
第二章:简要阐述无刷直流电机的原理和结构,接下来建立数学模型,运用相关公式对无刷直流电机的运行特性分析。
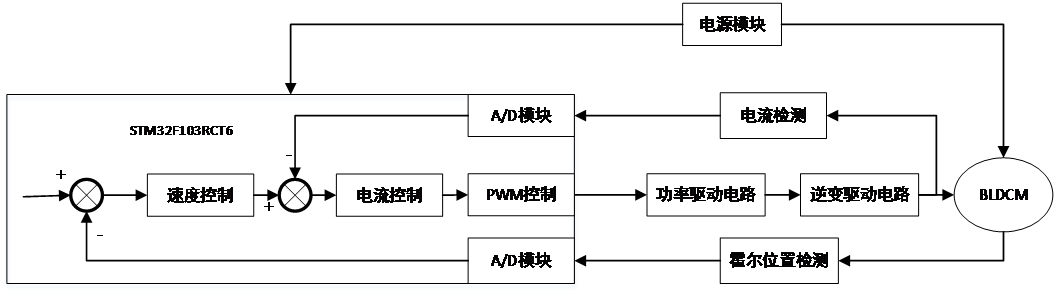
第三章:说明采用双闭环控制的原理,接下来进行传统的PID控制分析,设计PID控制策略。并进行硬件电路部分设计,系统采用 STM32系列芯片为主控制芯片,并完成了电源电路,霍尔传感电路,驱动电路,采样电路的设计等。
第四章:简述了系统的软件设计部分。首先,简单地说明软件开发环境。随后基于硬件开发的基础,设计无刷直流电机控制系统的软件部分,并撰写部分程序框图。并进行系统实物的验证,采用开发板进行程序下载和测试,完成系统的测速调试,并得到结果,进行分析。
第五章:总结与分析,简述了本文设计的全过程,并指出一些不足指出在后续的研究中进行改正。
第2章 无刷直流电机的原理和结构
2.1 无刷直流电机组成结构
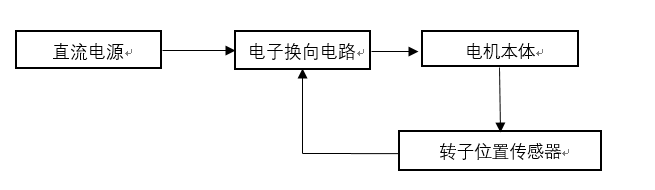 与有刷直流电机的运用换向器原理不同,无刷直流电机要转动,需要通过电子换向电路来实现。由位置传感器的输出信号,可以获得并确定转子位置,再根据电子换相电路所得反馈信息,驱动控制电机本体使电枢绕组通电,电流在转子上通过,形成旋转的磁场,磁力控制永磁转子转动。无刷直流电机的工作原理图如图2.1所示。通常无刷直流电机由转子位置传感器,电机本体,电子换向电路几大模块构成。
与有刷直流电机的运用换向器原理不同,无刷直流电机要转动,需要通过电子换向电路来实现。由位置传感器的输出信号,可以获得并确定转子位置,再根据电子换相电路所得反馈信息,驱动控制电机本体使电枢绕组通电,电流在转子上通过,形成旋转的磁场,磁力控制永磁转子转动。无刷直流电机的工作原理图如图2.1所示。通常无刷直流电机由转子位置传感器,电机本体,电子换向电路几大模块构成。
图2.1无刷直流电机基本结构
2.1.1 电机本体
电枢绕组定子和永磁体转子是电机主体构成的主要部分。对于有刷直流电机和无刷直流电机而言,在电机本体的构造上,都应是相似结构。电机本体的结构是有很多种类的,并且可以根据电板,极对转子的数量,和所述空气间隙磁场的方向的数量的相绕组相的数目来划分。根据电板的相绕组的数量,可以分为单相,两相,三相,多相等;根据转子的对数,它可分为2,4,6,和8;根据转子磁极所产生的磁场方向不同,可具体分为径向磁场、轴向磁场等;根据所使用的径向式无刷直流电机的转子排列方式不同,可分为面装式和内置式两种形式。
2.1.2 电子换向电路
一般来说,电子换向电路是无刷电机运行的核心部分,其作用是用来调节电子三相绕组的导通顺序,以及调节各相的通电时长的。一般情况下,采用大功率元器件与无刷直流电机控制器结合,构成功率驱动电路。常用的大功率器件有GTO、MOSFET等。单片机微处理器通过将所得的信号处理,输出PWM信号,再通过换向电路调节三相绕组的通电顺序,按所想的逻辑次序通电,即可得到正常运行的无刷直流电机。
由于时代发展,高精度要求的控制场合越来越多,所以对换向电路的基本要求也开始提升,基础要求为稳定可靠,更强调要线路简单、体积小、便于维修、重量轻、使用寿命长等[4]。能够控制无刷电机分别进行正转和反转,并根据位置传感器所得信号进行精准的控制和换向。
2.1.3 转子位置传感器
转子位置传感器是换向的依据,通过检测电机转子位置的进行信息反馈,通过反馈信息,进而控制换向。同时,通过转子位置传感器的检测信息,可以确定转子和定子的主磁场夹角。一般情况下无刷直流电机均带有位置传感器,不考虑无位置传感器,进行无感位置检测技术计算转子位置。
以STM32芯片为核心,将位置传感器所得的数字信号,经过 AD转换后作为输入信号导入,根据输入信号的信息,反馈控制输出信号,即控制电子换相电路,从而达到控制功率管开断的目的等。转子位置传感器种类很多,现在市场上流行的大多有电磁式、光电式、磁敏式三种[5]。电磁式位置传感器需要将直流信号转换为交变信号才可使用,过于繁杂。而光电式传感器对于温度要求较高,适用性低。磁敏式传感器,以两大理论为基础:霍尔效应、阻尼效应,采用高精度的加工技术制造,适用范围更广,因而采用带有霍尔传感器的磁敏式位置传感器。
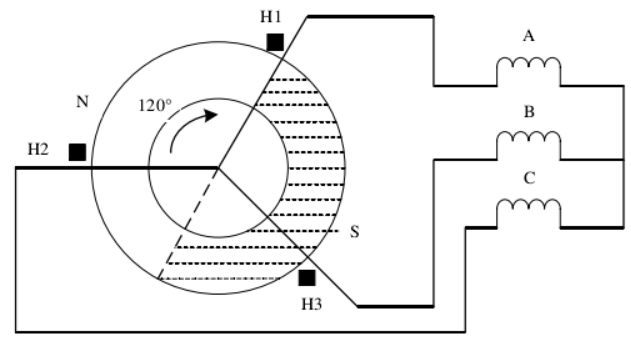 本文无刷直流电机永磁转子的位置检测,通过采用霍尔传感器来完成。如图 2.2 所示,即为一对磁极,三个位置传感器按圆周分布在无刷直流电机四周,相互之间构成120°的电角度,随电机三相绕组的通过电流而加入电压工作。
本文无刷直流电机永磁转子的位置检测,通过采用霍尔传感器来完成。如图 2.2 所示,即为一对磁极,三个位置传感器按圆周分布在无刷直流电机四周,相互之间构成120°的电角度,随电机三相绕组的通过电流而加入电压工作。
图2.2 霍尔传感器安装示意图
2.2 无刷直流电机工作原理
无刷直流电机控制系统主要由无刷直流电机、位置传感器和驱动电路组成。工作原理图如图2.3所示。
图2.3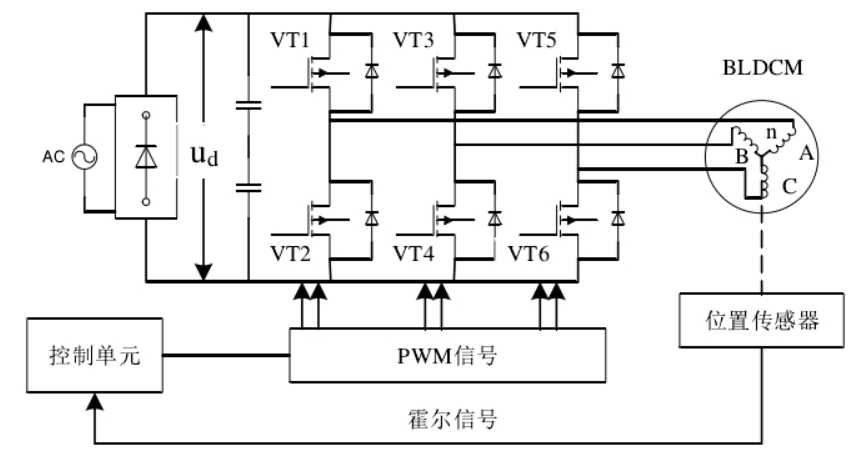 无刷直流电机控制原理图
无刷直流电机控制原理图
当定子绕组的其中一相通电时,通过与永磁体磁极产生的磁场和电流相互作用所产生的磁场来驱动转子旋转。此时,转子位置传感器的要实时监视的转子位置,并将所检测的位置信号,转换成电信号,输入到控制单元中,通过控制输出PWM信号,来控制逆变器,以便所述逆变器可以一定的逻辑顺序中被打开和关闭,然后拖动无刷直流电动机在特定方向上准确地操作[6]。
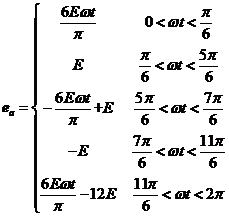
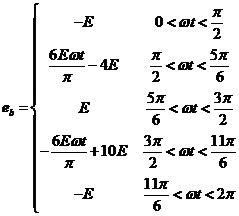
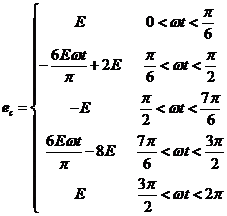
在一个Y型连接的无刷直流电动机,电动机具有三根导线,每一个连接到一个绕组。每个绕组被连接到一个公共点。此公共点共同用于所有三个绕组。定义三根导线为ABC。如下图2.4所示,当电流流过电动机绕组时,电动机启动,正电动势施加到A引线,并将反电动势施加到B引线。在这种情况下,电动机绕组的绕组在定子上产生磁场,由N和S标记表示。然后旋转转子以使转子的北极与定子的南磁极对准。类似地,转子的南极与定子磁场的北极对齐。因此,获得六步换向,且六步换向序列使电动机执行电旋转。
表2.1 六步换相步骤
六步换相步骤 | ||
给A绕组加正电 | 给B绕组加负电 | C绕组未通电 |
给A绕组加正电 | 给C绕组加负电 | B绕组未通电 |
给B绕组加正电 | 给C绕组加负电 | A绕组未通电 |
给B绕组加正电 | 给A绕组加负电 | C绕组未通电 |
给C绕组加正电 | 给A绕组加负电 | B绕组未通电 |
给C绕组加正电 | 给B绕组加负电 | A绕组未通电 |
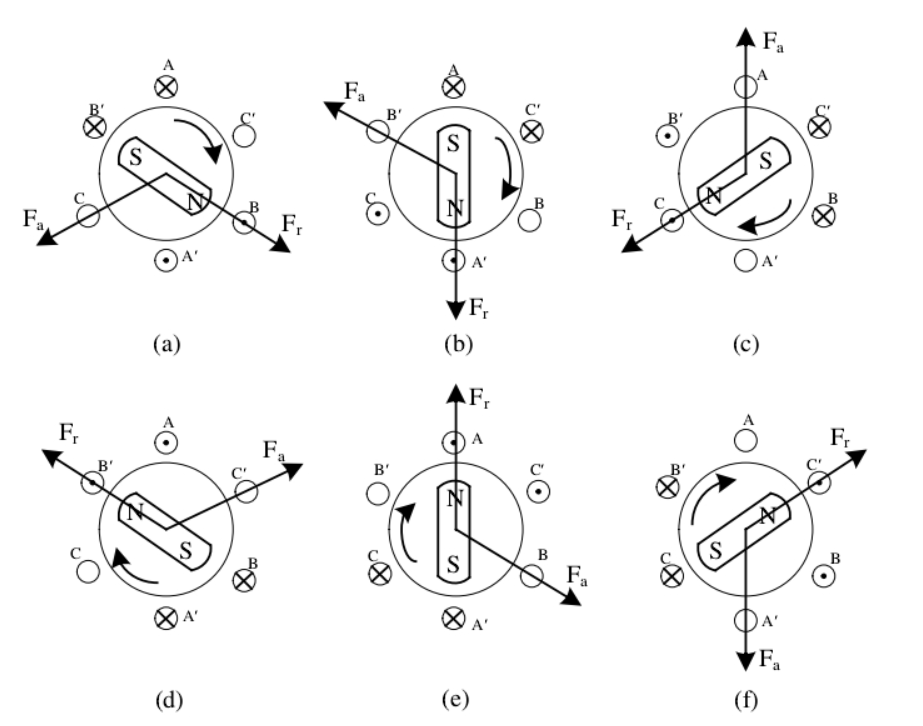 图2.4 无刷直流电机运行原理图
图2.4 无刷直流电机运行原理图
2.3 无刷直流电机数学模型
因为无刷电机所存在的非线性和时变性等特点,难以进行系统的数学分析,因而在进行无刷直流电机的数学模型分析时,一般采用理想假设法来建立数学模型表达式。取Y形连接,两相导通,三相六状态的无刷直流电动机为例,当满足以下假设条件时:
(1)三相定子绕组绕线布局对称且参数相同;
(2)不考虑自感和互感的影响,计自感、互感、内阻均相等;
(3)不考虑电枢反应和磁路饱和的影响;
(4)不考虑定子齿槽效应以及各种损耗等;
(5)不考虑永磁磁场分布不均匀和阻尼效应。
当无刷电机满足以上假设条件时,易得从数学角度分析的电压状态方程:
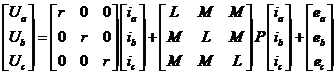 (2.1)
(2.1)
其中,三相绕组端电压(V)是 、
、 、
、 ;三相绕组相电流(A)是
;三相绕组相电流(A)是 、
、 、
、 ;三相绕组反电动势(V)是
;三相绕组反电动势(V)是 、
、 、
、 ;
; 为每相绕组的电阻(Ω);每相绕组的自感(H)是
为每相绕组的电阻(Ω);每相绕组的自感(H)是 ;
; 是每个两相绕组之间的互感(H);
是每个两相绕组之间的互感(H); 是微分算子。
是微分算子。 (2.2)
(2.2)
因为采用Y型连接方法,所以没有地线,即不存在中心线,所以其电流关系式为:
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: