机器人用机电一体化关节模组实体建模及动力学分析开题报告
2020-02-19 22:35:04
1. 研究目的与意义(文献综述)
1.目的及意义
1.1机器人及其关节模组的发展背景
在我们的印象中,机器人(robot)这一词的出现,只是近代的事情,但这一思想却可以追溯到很遥远的古代;在古希腊和古代中国以及古代日本的历史文献中就已经有了自动作业机的记录,只是在现在看来这些机械不过是具有一定机巧的自动装置而已。[1]
剩余内容已隐藏,您需要先支付后才能查看该篇文章全部内容!
2. 研究的基本内容与方案
2.研究的基本内容、目标、拟采用的技术方案及措施
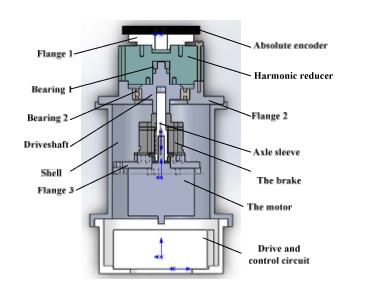
本次研究的机电一体化关节模组是由驱动机构、谐波减速机构、制动器、编码器、连接部件等组成,各组成部件的布局参考图2,驱动控制模块布置在关节的尾端,剩下依次是无刷直流伺服电机,光电编码器,机械抱闸器,杯形谐波减速器,各部件运动由轴件传递。
剩余内容已隐藏,您需要先支付后才能查看该篇文章全部内容!
3. 研究计划与安排
3.进度安排
完成任务的时间节点:
(1)2019.1-2019.2.20阅读相关论文文献,理解关节模组组成机构;
剩余内容已隐藏,您需要先支付后才能查看该篇文章全部内容!
4. 参考文献(12篇以上)
4.阅读的参考文献
[1]朱世强,王宣银.机器人技术及其应用[m].浙江:浙江大学出版社,2008,2,31
[2]龚仲华,夏怡.工业机器人技术[m].北京:人民邮电出版社,2017,2,76-77
剩余内容已隐藏,您需要先支付 10元 才能查看该篇文章全部内容!立即支付



