基于肘关节骨骼肌模型的人机交接口设计与实现开题报告
2020-03-20 23:45:54
1. 研究目的与意义(文献综述)
1.1 研究目的及意义
目前,我国已成为世界上老年人口最多的国家。据国家统计局2018年1月18日发布的最新老年人口统计数据,2017年末,我国60周岁及以上人口24090万人,总人口的17.3%, 65周岁及以上人口15831万人,占总人口的11.4%。由于老年人身体机能的退化,关节炎、中风、偏瘫等肢体障碍疾病的发生率也在持续上升,极大的影响了这些患者的日常生活,降低了他们的生活质量。预计每年新增的60岁以上老年人口中,有60%—70%需要康复服务。此外,我国目前有8500万残疾人,每年新增近200万人,有40%的残疾人有康复需求。
康复医疗一直是现代医学的重要组成部分,随着国外康复医疗发展经验的不断影响,康复医疗的新模式、新技术层出不穷。传统的康复治疗主要通过物理疗法、体育疗法、生活训练等多种手段,存在人员消耗大、康复周期长、效果有限等问题[1]。其次,在训练过程中,患者处于被动地位,动作反复、单调、枯燥,患者很容易产生厌烦情绪,不利于治疗的继续和深入。
2. 研究的基本内容与方案
本论文以骨骼肌为对象,从运动机理出发,构建人体上肢肘关节部位运动系统正向生物力学全过程模型,获得肘关节力矩,包括研究肘关节部位骨骼肌生物电激活模型,肌肉收缩力学模型,肌肉结构功能模型。再通过建立逆动力学模型,即用肘关节位置,关节速度和关节加速度,获得关节力矩,验证正向动力学模型的结果。同时,基于该骨骼肌模型输出的关节力矩,设计人机交互系统接口,并搭建相应的虚拟系统,最终达到人体肘关节的屈伸运动能控制虚拟对象的状态,实现人与虚拟对象的友好互动。系统组成由图1所示。
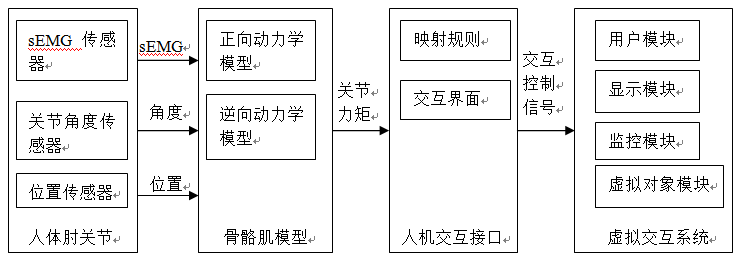
图1 结构框图
3. 研究计划与安排
第1-3周:查阅相关文献资料,明确研究内容,了解研究所需理论基础。确定方案,完成开题报告。
第4-6周:了解肌电信号的采集、提取及预处理的方法,完成英文资料的翻译,熟悉开发环境。
第7-9周:设计出一套肌肉力模型和动力学模型结合的骨骼肌模型,提取出肌肉力和角度信息,并用matlab进行验证。
4. 参考文献(12篇以上)
[1] 侯增广, 赵新刚, 程龙,等. 康复机器人与智能辅助系统的研究进展[j]. 自动化学报, 2016, 42(12):1765-1779.
[2] 梁旭, 王卫群, 侯增广,等. 康复机器人的人机交互控制方法[j]. 中国科学:信息科学, 2018(1).
[3] 吴銮, 黄鹏程, 鲍官军,等. 表面肌电信号分析及其在康复医学中的应用[j]. 机电工程, 2011, 28(11):1368-1373.



