无人电动巴士感知系统设计开题报告
2020-04-12 16:03:23
1. 研究目的与意义(文献综述)
| NO. | company | nation | name | type | picture | capacity | sensors |
| 1 | Navya | France | Arma | minibus | | 15 | Lidar,camera,GNSS/RTK,odometry |
| 2 | Easy Mile | France | EZ10 | minibus | | 10 | GPS,Lidar,camera |
| 3 | Oxbotica | UK | GATEway | minibus | | 8 | Lidar,camera |
| 4 | Local Motors | US | Olli | minibus | | 9 | Lidar,camera,radar,IMU,GPS |
| 5 | 青飞智能 | China | Genius100 | minibus | | / | Lidar,camera |
| 6 | 驭势科技 | China | Uisee | minibus | | / | Lidar,camera |






Unmanned electric buses are generally used to the ferry service. Their operating scenarios are closed or semi-enclosed parks whose road conditions are simple. In addition, this type of product has become the first choice for many autopilot start-up companies because of the small size, simple structure and short development cycle,.After investigation, it was found that the technology gap between domestic and foreign companies in unmanned electric buses is still relatively large. The unmanned electric buses of several foreign companies have already been put into operation through experiments.On their official website, detailed manuals of products and videos of actual operation are available, but these are not available on the domestic companies. It is noted that currently almost all of the driverless car perception systems use laser radars and cameras, indicating that the perceptual systems using these two sensors are both better at cost and perceptual effects.
The unmanned electric bus designed for this article has a driverless level of level 4, which runs on a structured road in the urban environment. Structured roads refer to standardized roads with clear lane markings and road boundaries. Due to the relative ease of urban transportation, good road conditions and less dust, the database is simple. Therefore, unmanned electric buses achieve the following functions:
(1) Road recognition in the case of lane lines
(2) edge detection
(3) Traffic Signs and Signal Detection
(4) Pedestrians and Vehicle Inspection
2. 研究的基本内容与方案
if the environment awareness system is modularized, it can be divided into three modules:
(1) exterior environment perception module: all the above functions can be realized by using machine vision whose sensors are cmos/ccd cameras; the laser radar can achieve functions more reliable. this article selects the laser radar and camera to detect simultaneously.
(2) navigation and positioning module: there are currently four major directional positioning methods:
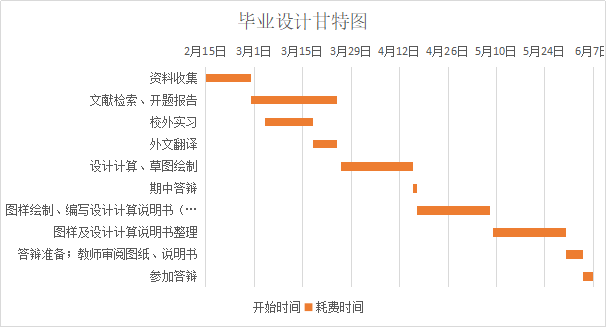
3. 研究计划与安排
4. 参考文献(12篇以上)
参考文献
[1] 田甄.智能车辆多激光雷达目标检测系统的设计与实现[d].重庆邮电大学.2016
[2] 王宝锋,齐志权,马国成,陈思忠.一种基于雷达和机器视觉信息融合的车辆识别方法[j].汽车工程,vol.37 ,no.6.2015



