基于物理的实时动画角色动态运动控制研究综述外文翻译资料
2022-11-12 19:50:04

英语原文共 5 页,剩余内容已隐藏,支付完成后下载完整资料
基于物理的实时动画角色动态运动控制研究综述
1Ismahafezi Ismail 2Mohd Shahrizal Sunar 3Mohd Kufaisal Mohd Sidik 4Cik Suhaimi Yusof
马来西亚Teknologi大学计算机科学和信息系统计算机图形和多媒体系UTM ViCubeLab
81310, Johor, Malaysia
1ismahafezi@yahoo.com 2shahrizal@utm.my 3mohdkufaisal@gmail.com 4suhaimi@utm.my
摘要—本文对实时动画角色的运动进行了研究。实时动画角色存在着角色运动不真实、不自然的问题。本文重点介绍了基于物理考虑和控制的动态运动生成的三个主要部分:骨架层次结构和运动学、运动捕捉数据动画和主动动态控制。
关键词-动作捕捉, 实际运动数据, 角色动画
一、引言
一般来说,在非实时动画中生成的虚拟角色在电脑游戏中的运动,与真实的人类动作相比,僵硬而不自然。为了实现逼真的虚拟人体运动,动画角色需要具有和真人一样的运动。用运动捕捉技术,对真实的人体运动数据进行分析,可以应用于实时动画中的虚拟人物。在电脑游戏产业中,一个主要的挑战就是创造一个动态的动作。计算机游戏行业的主要挑战之一是创建一个动态的运动生成,可以响应物理交互。目前,虚拟角色中的所有动作都是由动画师使用关键帧提前创建的。与真人不同,动画师创造的动作是固定的。这些运动是为了适应特定的运动情境而产生的,它们之间的联系也由此产生。因此,角色将在实时动画中重复相同的动作。因此,它看起来不切实际,并且角色不能响应与其他自主角色的物理交互。实时动画中的角色需要来自不同来源的运动组合,如运动捕捉、手动关键帧、动态和运动学仿真[1]。表1对这种方法进行了总结。
动态运动是指三维物体的物理性质,如质量或惯性,并指定了外力和内力如何与物体[2]相互作用。随着人物数据的动态变化,对人物具体动作的控制:行走、奔跑、跳跃看起来更加逼真。实时字符由由节点连接的实体段组成。这些部分和关节被称为骨架。骨架的运动可以通过旋转和平移来指定。运动学方法是指位置、方向和速度等虚拟特性。正运动学方法直接控制着骨骼各骨的相对几何变换,而逆运动学是关于几何位置到给定点的解。
表1:实时动画中角色运动的来源[3]
|
动作捕捉 |
主动传感器 |
机械 |
|
磁性 |
||
|
视觉 |
||
|
惯性 |
||
|
被动传感器 |
反光标记 |
|
|
发光二极管 |
||
|
计算机视觉 |
||
|
计算机生成 |
运动 |
正运动学 |
|
逆运动学 |
||
|
动态 |
本文研究了基于物理的实时动画角色动态运动控制的层次性基础。这篇综述将集中在骨骼层次结构和运动学,运动跟踪数据动画,和主动动态控制。
二、骨骼层次和运动学
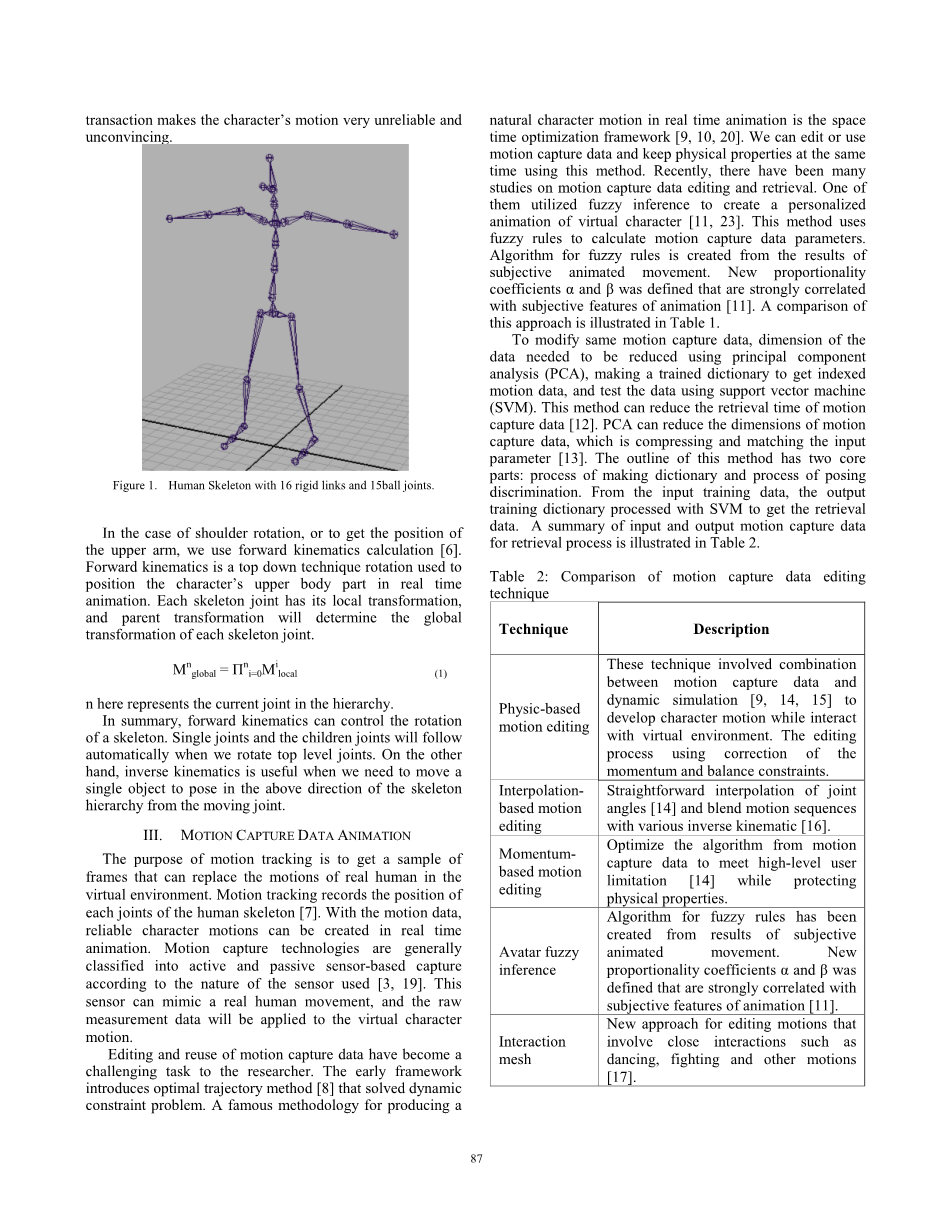
一般来说,真实动画中的人物是由骨骼来代表的。骨骼是由由特定的关节[4]连接起来的骨头排列而定义的。一个实时动画角色有16个刚性链接和15个球关节,如图1[5]所示。虚拟字符的总自由度(DOF)为41[5]。等级制度使用分组或养育的概念。例如,对于人类的腿,臀部是上部腿的母体。同时,小腿是上小腿的子,脚是下小腿的子。在实时动画环境中,每根骨骼都依赖于它的方向和与它的父节点[4]的关节。
逆运动学和正运动学的作用是计算骨骼的位置,包括关节的位置和角度[6]。通常,逆运动学用于涉及角色身体下部的运动,如从脚到骨盆的关节[4,5,6]。使用正运动学是非常困难的,因为身体的位置将在地面或地面以下移动。这一交易使得角色的动作非常不可靠,也没有说服力。
图1 人体骨骼有16个刚性连杆和15个球关节
在肩关节旋转的情况下,或为了得到上臂的位置,我们使用正运动学计算[6]。正运动学是一种自顶向下的旋转技术,用于在实时动画中定位角色的上半身。每个骨架节点都有自己的局部变换,父节点的变换将决定每个骨架节点的全局变换。
(1)
这里的n表示层次结构中的当前节点
综上所述,正运动学可以控制骨架的旋转。当我们旋转顶部关节时,单关节和儿童关节会自动跟随。另一方面,逆运动学是有用的,当我们需要移动一个单一的对象,以上述方向的骨骼层次结构从运动关节。
三、动作捕捉数据动画
运动跟踪的目的是得到一个能够代替真实人类在虚拟环境中的运动的帧的样本。运动跟踪记录人体骨骼[7]各关节的位置。有了这些运动数据,可以在实时动画中创建可靠的角色运动。根据所使用传感器的性质,运动捕捉技术一般分为基于主动传感器的捕获和基于被动传感器的捕获[3,19]。该传感器可以模拟真实的人体运动,并将原始的测量数据应用于虚拟人物的运动。
运动捕捉数据的编辑与重用已成为研究人员面临的一项艰巨任务。早期的框架引入了最优轨迹法[8],解决了动态约束问题。在实时动画中生成自然角色运动的一个著名方法是时空优化框架[9,10,20]。我们可以编辑或使用运动捕捉数据,同时保持物理属性使用这种方法。近年来,对运动捕捉数据的编辑和检索进行了大量的研究。其中一种是利用模糊推理来创建虚拟人物的个性化动画[11,23]。该方法利用模糊规则计算运动捕捉数据参数。根据主观动画运动的结果,建立了模糊规则的算法。新比例系数alpha;和beta;的定义同主观特性紧密相关的动画[11]。表1对这种方法进行了比较。
为了修改相同的运动捕捉数据,需要使用主成分分析(PCA)降低数据的维数,制作训练有素的字典获取索引运动数据,并使用支持向量机(SVM)对数据进行测试。该方法可以减少运动捕捉数据[12]的检索时间。PCA可以减小运动捕捉数据的维数,即压缩和匹配输入参数[13]。该方法的框架主要包括两个核心部分:词典制作过程和判别过程。在输入训练数据的基础上,利用SVM对输出训练字典进行处理,得到检索数据。检索过程中输入和输出运动捕捉数据的摘要如表2所示。
表2:运动捕捉数据编辑技术比较
|
技术 |
描述 |
|
物理基础运动编辑 |
这些技术包括将运动捕捉数据与动态仿真相结合[9,14,15],在与虚拟环境交互的同时开发角色运动。编辑过程中使用动量和平衡约束进行校正。 |
|
基于插值的运动编辑 |
直接插补关节角[14]和混合运动序列与各种逆运动学[16]。 |
|
基于动量的运动编辑 |
从运动捕捉数据出发,对算法进行优化,在保护物理特性的同时满足高层次用户限制[14]。 |
|
Avatar 模糊处理 |
根据主观动画运动的结果,建立了模糊规则的算法。新定义比例系数alpha;和beta;强烈与动画的主观特征[11]. |
|
交互网 |
编辑动作的新方法,包括密切的互动,如舞蹈,战斗和其他运动[17]. |
图2 运动捕捉数据的输入和输出摘要
运动跟踪是字符运动动态控制的核心部分。利用运动数据,用户可以直接控制和修改实时动画中的人物运动。
四、活动的动态控制
使用动态引擎应用程序,如浩劫物理,大规模和开放的动态引擎(ODE),物理现实的实时动画已经升级到另一个层次。该应用可以解决刚体动力计算[22,25]、动力接触和摩擦等问题。物理实时动画角色有一个刚体,它有自己的力、速度、质量和物理属性。控制动态运动仿真的主要步骤是角色运动的基本动力学。
虽然物理属性可以应用于实时动画中的角色运动,但是当涉及到刚性对象时,它仍然是有限的。主动动态控制可以从任何运动员的运动[4],如自行车,战斗,跑步和游泳。采用反馈控制系统[4,24]对运动捕捉数据进行处理。采用基于机器人的控制器和基于性能优化的[18]方法等物理仿真方法可以生成人体运动。
关于动态运动控制的相关研究:
A.基于动态的运动控制
为了实现基于动态的字符运动控制,人们开发了许多方法。给出了实例,用一个肌肉力量模型[21]进行了运动学反求。该方法利用骨架[26]的关节来计算和改变运动速度和轨迹。另一种技术是使用逆运动学方法创建运动,并使用逆动态生成人体步行运动[26]。
B.动态运动控制结构
一般来说,动态运动控制必须有两个核心部分:控制器和模拟器。动态运动控制器的结构如图3所示。利用控制器函数,我们可以直接参照运动捕捉数据输入的最新状态来计算关节角加速度。然后,模拟器通过动态字符运动来更新进程。该结构的前期结果是输出角加速度为初始值与角加速度∆[26]之差之和。同时,基于人体模型和外部物理输入相结合的结果输入为控制器和模拟器[26]。
图3 动态运动控制器[26]的结构
最近对动态运动生成与控制的研究显示了基于虚拟人物运动控制仿真的新过程(图4)。输出运动由物理模拟器产生。用户需要知道控制字符运动的基本动态仿真。将作用于物体的力与加速度之间的关系联系起来的方法可以分为两类:最大坐标法和约简坐标法。
图4 基于虚拟人物运动控制的过程仿真[18]
五、总结
本文对基于物理的实时动画动态运动生成控制的主要部分进行了综述。这些主要部件可分为三类:(a)骨架层次结构和运动学;(b)运动捕捉数据动画;(c)主动动态控制。这篇综述对学生和研究人员理解实时动画中角色运动的概念和技术非常重要。
在实时动画中,角色运动的主要挑战是使角色像真人一样自动移动和指示。为了在保持角色物理特性的同时获得自然、平衡的动态角色运动,需要探索多种学习模型和不同的控制方法。运动捕捉动画数据的编辑和修改技术需要最大化到最高水平,以实现虚拟人物逼真和令人信服的动作。
致谢
本研究由马来西亚Teknologi大学计算机科学与信息系统学院计算机图形与多媒体系UTM VicubeLab资助。特别感谢马来西亚Teknologi大学(UTM) Vot. 00J44研究型大学资助计划(RUGS)为本研究提供财政支持。
参考文献
- Yueqi, H., W. Shuangyuan, et al. (2010). Motion track: Visualizing variations of human motion data. Pacific Visualization Symposium (PacificVis), 2010 IEEE.
- Oshita, M. (2006). Motion-capture-based avatar control framework in third-person view virtual environments. Proceedings of the 2006 ACM SIGCHI international conference on Advances in computer entertainment technology. Hollywood, California, ACM: 2.
- J. Blagica, P. Marius, et al. (2009). The role of interoperability in virtual worlds, analysis of the specific cases of avatar. Journal of Virtual Worlds Research. Vol. 2, No. 3
-
Wrotek, P., O. C. Jenkins, et al. (2006). Dynamo: dynamic, data- driven character control with adjustable balance. Proceedings of the 2006 ACM SIGGRAPH symposium on Videogame
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[18662],资料为PDF文档或Word文档,PDF文档可免费转换为Word



