铁路桥梁在列车荷载作用下的现场动态位移测量模型更新外文翻译资料
2021-12-27 22:32:53
英语原文共 12 页
铁路桥梁在列车荷载作用下的现场动态位移测量模型更新
摘要
针对铁路桥梁老化监测的需要,提出了一种基于列车荷载下动态位移历史现场测量的有限元模型更新方法的时域优化方法。利用作者小组最近研制的低成本远程视觉传感器,在短跨板梁铁路桥上进行现场测试,以测量其对不同速度的货运列车载荷的位移响应。考虑列车轨道-桥梁动力相互作用,建立了桥梁有限元模型。进行了灵敏度分析,研究了列车、轨道和桥梁子系统参数对桥梁动力响应的内在影响。研究发现,桥梁位移响应主要是对桥梁刚度敏感的,而加速度响应受许多其他参数的影响。研究发现,桥梁位移响应主要是对桥梁刚度敏感的,而加速度响应受许多其他参数的影响。这就证明了桥梁动态位移比加速度更适合于更新铁路桥梁刚度。因此,提出了一种利用桥梁位移响应测量方法进行模型更新的方法。将该方法应用于短跨径桥梁,通过最大限度地减小测量位移和计算位移时间历史之间的误差,首先确定列车速度,然后确定桥梁刚度。此外,本文还从测量和计算位移两方面研究了频率特性。分析表明,由于频率远远低于桥梁的固有频率,列车荷载不会激发桥梁的自然振动模式。因此,基于动态响应测量的模态识别有限元模型更新方法的使用是非常困难的。短跨度铁路桥的情况通常就是这样,它们的固有频率往往很高。提出的周期位移测量和时域有限元模型更新可以发展成为长期结构健康的有效工具。
关键词:铁路桥;模型更新;火车-轨道-桥梁互动;位移测量;动态响应;优化
引言
美国铁路网以货运铁路为主,运输全国40%以上的城际货运。货运铁路网,包括7。6万座桥梁,主要是100年前建成的,其中大部分桥梁仍在使用中。在过去几十年里,由于运输效率提高和经济不断增长的要求,交通负荷增加,使这些桥梁承受的荷载不同于它们设计的承受负荷。此外,在设计这些桥梁时,桥梁动力效应还没有得到充分的认识。因此,人们越来越关注和需要监测现有铁路桥的动态行为(Majka和Hartnett,2009年)。
人们为开发高效的数字车辆--桥梁相互作用模型以预测铁路和公路桥梁的动态响应作出了相当大的努力(Dowling等人,2012年;Majka和Hartnett,2008年;欧阳2011;Xia等人,2013年;Zhang等人,2001年)。对于铁路桥梁,根据列车荷载建模技术,这些研究一般可分为三类,即移动荷载模型(Liu等人,2009年;Yang等人1997年),移动的大量模型(Lee1996年;毛和路2013),和移动弹簧阻尼器系统模型(Cheng等人,2001年)。在这三种模型中,移动载荷模型是最简单、计算效率最高的模型,但列车-桥梁相互作用效应被忽略。移动质量模型考虑到了列车惯性效应,但没有考虑移动列车在桥梁上的弹跳作用,预计其作用对高速行驶或轨道粗糙的情况下行驶的列车意义重大(yang和Lin2005)。鉴于此,Cheng等人(2001年)提出了一个桥梁-轨道-车辆元素来研究铁路桥梁的动力响应。在轴向上,移动列车被建模为一系列双自由度质量-弹簧-阻尼器系统,因此也可以同时分析轨道的振动。对于旧桥,初始有限元(FE)模型通常需要通过使用现场测量数据微调其参数值来更新。这是由设计信息不完整、材料长期变质、几何形状和边界条件变化等原因导致参数不确定。然后,更新的模型可用于预测新负载情景下的动态响应、检测结构损伤、设计健康监测系统和评估剩余寿命。现有的模型更新方法一般是基于实验模态分析。例如,Ribeiro等人(2012年)介绍了根据环境振动数据中的实验模态参数对一座保龄球拱桥进行模态更新的情况。利用遗传算法对数值模型的15个参数进行了调整。经过人工有限元模型调整,Wiberg等人(2012年)采用运行模态分析和加载试验对铁路桥梁进行了模态更新。基于环境振动测量和实验模态分析的模型更新方法面临技术挑战,特别是短跨铁路桥(大多数在美国货运铁路网),这些桥梁高度刚性和体验很少的环境振动,因此很难准确提取模态参数。因此,利用列车荷载下的现场振动测量对短跨铁路桥梁的模型进行了更新。然而,铁路桥是一个时变系统,在列车通过过程中固有频率不断变化(Lu等人,2012年;Spiridonakos和Fassois2009)。此外,由于桥梁的振幅比重复列车载荷引起的主要频率小很多,因此可以对桥梁的固有频率进行阴影和看不见(本文稍后将对此进行讨论)。总之,在频域模态分析的基础上,对短跨铁路桥梁的有限元模型进行更新是很困难的。
提出了一种基于列车荷载下桥梁位移测量和时域优化的铁路桥梁有限元模型更新方法。下一节介绍了短跨板梁桥的现场测量,这是美国铁路桥网中经常采用的桥梁类型。在'初始有限元模型公式'一节中,针对考虑列车轨道-桥梁相互作用的桥梁,建立了初始有限元模型。在接下来的部分中,进行了参数灵敏度分析,以证明位移测量比常用的加速度测量更适合于更新桥梁刚度。在此提维联用两步有限元模型的更新过程中,将其与列车转速一起更新为桥梁的刚度。在'短跨桥梁在列车荷载作用下的动力特性'一节中,通过对该列车----桥梁的频率特性的分析,研究了该短跨铁路桥梁在列车荷载作用下的动力效应。交互系统。
铁路桥梁与动力位移的现场测量
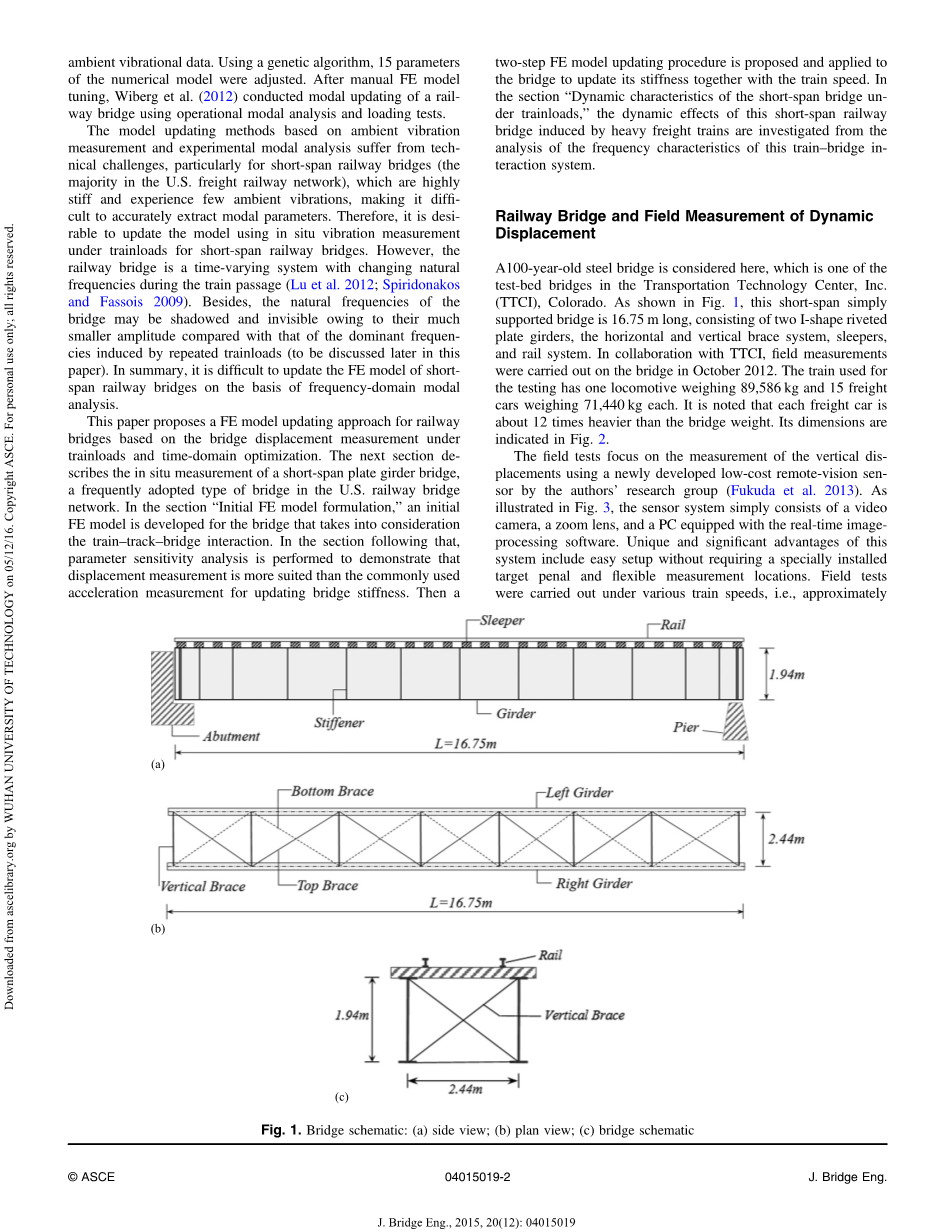
有着100年历史的钢桥在科罗拉多州运输技术中心(TTCI),是试验台桥梁之一。如图1所示。
这座短跨度简支桥长16。75米,由两个i形铆接板梁、水平和垂直支撑系统、枕木和轨道系统组成。2012年10月,与TTCI合作,在大桥上进行了实地测量。用于测试的列车有一辆重量为89586公斤的机车和15辆每辆重71440公斤的货车。需要注意的是,每辆货车的重量约为桥梁重量的12倍。其尺寸如图2所示。
现场测试的重点是利用作者研究小组新开发的低成本遥感传感器测量垂直位移(Fukuda等人,2013年)。如图3所示。
传感器系统仅由摄像机、变焦镜头和配备实时图像处理软件的PC组成.该系统的独特和显著优势包括易于设置,而无需专门安装的目标和灵活的测量位置。根据列车速度计,在各种列车速度下进行了实地测试,即分别约8.05、38.62和64。36千米赫(分别为5。24和40米)。传感器系统被放置在离桥梁9。15米的固定位置。摄像机以150帧的采样率捕捉目标的视频图像。视觉传感器的缩放系数为0。69mm/像素。为了进一步提高测量精度,在原始方向码匹配(OCM)模板算法中加入了亚像素技术,即重心。在试验过程中,观察到实际分辨率小于0。05毫米。图4显示了在8。05km/h列车载荷下的中跨典型位移时间历史。负号表示向下偏转。位移历史类似于列车装载模式,每辆车的贡献可以清楚区分。这17只高峰反映了使用的汽车数量。
有限元模型的初始方法
针对该铁路桥,考虑了列车、轨道、桥梁三个子系统之间的相互作用,建立了该铁路桥的初始有限元模型。此模型在'灵敏度分析和FE模型更新'一节中用作更新的基线。
列车-轨道-桥梁相互作用的理论与假设
在本研究中,考虑了铁路桥梁在垂直方向上的动力响应,没有滚动和打哈欠效应。因此,列车轨道-桥梁相互作用系统被理想化的二维(2D)有限元模型,如图5所示。
在该模型中,分别采用上梁和下梁单元对钢梁和桥梁进行了建模。钢轨床的弹性和阻尼特性由一系列弹簧和阻尼器表示。
路堤上的轨道被建模为粘弹性地基上的梁。列车子系统模型采用以下假设:(1)列车在桥上以恒定速度运行;(2)列车可在车轴位置建模为多个(在本例中为机车6个,每辆车6个)独立弹簧-阻尼器悬架系统;(3)只考虑垂直方向的自由度;因此,每个弹簧-阻尼器悬挂系统有两个自由度。
通过结合三个子系统各自的运动方程,可以用子矩阵形式导出列车轨道-桥梁系统的运动方程(Cheng等人,2001年;Lou2007):
其中下标b、r和t=桥、铁轨和火车。螺栓矢量Xb、Xr和Xt=桥梁、轨道和火车轴的位移矢量。列车的矩阵Mtt、Mtt和Mtt用下标tt标记。导轨的矩阵Mr、Krr和Crr用下标rr标记。桥的矩阵Mbb、Mbb和Mbb用下标bb标记。由列车-轨道相互作用诱导的矩阵Krt、Crt、Ktr和Ktr由下标rt或tr表示。由列车-轨道相互作用诱导的矩阵Kbr、Kbr、Krb和Crb由下标br或rb表示。这个方程可以进一步写成:
其中M、C和K=全局质量、阻尼和刚度矩阵;X(t)、X_(t)和Xeuro;(t)=位移、速度和加速度向量;和F(t)=力矢量。需要注意的是,相互作用系统代表了一个耦合的时变动态系统,即质量、阻尼和刚度矩阵以及由于与移动列车的相互作用而随时间变化的系统的力向量。因此,它们必须在每个时间步骤进行更新。利用Newmark-beta;方法,可以逐步求解Eq。(1)或(2),同时获得桥梁、列车和轨道的动态响应。
在本研究中,作为瑞利阻尼的一个特例,假定桥梁的刚度比例阻尼,定义为:
其中cb和kb分别为桥梁梁单元的阻尼和刚度矩阵;和alpha;为常数比例系数,设置为0。01。
铁路桥初始有限元模型
表1和表2列出了初始有限元模型的桥梁、铁路系统和货运列车子系统的参数值。桥梁参数的值基于设计图纸。轨道床和列车悬架系统,即Krb、Crb、Kt和Ct的弹性和阻尼特性是不可用的,值根据文献近似值(Liu等人,2009年)。对于研究垂直动力响应的二维模型,由于列车轨道-桥梁系统的对称性,只考虑了一半。火车-轨道-桥梁fe模型总共有3,138度的自由度。
图6将在列车载荷下的初始有限元模型测量到的位移与模拟位移进行了比较,速度为8。05kmh。观察到在振幅和时间延迟方面存在一些分歧。这被认为是由于所采用的系统参数和列车速度的不确定性造成的。
灵敏度分析和有限元模型更新
传统上,在桥梁的动态试验中经常测量加速度,因为很难安装位移传感器(例如Lvdt,因为它们需要一个固定的参考点)。新出现的远程传感器,如本研究中使用的视觉传感器,现在可以低成本测量动态位移。因此,首先进行敏感性分析,以比较各种参数对位移和加速度响应的影响。在此基础上,提出了一种两步模型更新方法,并将其应用于铁路桥梁。
作为优化问题的Fe模型更新
有限元模型更新过程本质上是一个优化问题,其中更新参数是模型中高度不确定的参数。目标函数被定义为估计数据和测量数据之间的误差距离。
考虑到u(tk)和y(tk)分别是结构系统在瞬时tk(其中k=1)的真正输入和输出向量;2;。;;并表示物理系统可以用一组参数来描述,这些参数可以在参数向量=f1中组装;2;;;Ngt。在机械系统中,未知参数i(i=1;2;。。。;n)可以是质量、阻尼或刚度参数。然后,输入-输出关系可以用一般表达式表示:
表示y(tk)为从fe模型获得的估计结构响应,使用相同的输入u(tk)和估计的结构参数值集合:
FE模型更新过程的目的是找到的最佳估计,以最大限度地减少测量的响应y(tk)和预测的Y(tk)在整个时间历史上的误差。在涉及动态响应测量的问题中,通过优化过程最小化的目标函数可以表述为测量和预测响应在测量周期内的均方误差(MSE)之和(周日和贝蒂2013;Sun等人,2013年),如:
其中nrec记录的时间历史记录的数量,这取决于测试中使用的传感器的数量;和'‖sdot;‖'=向量的欧几里得范数。然后将整个FE更新问题总结为:
其中n为标识的参数数;和是参数的下限和上限。总之,将有限元模型更新问题作为线性约束非线性优化问题作为研究中的一个问题。
灵敏度分析
桥梁的动力响应受桥梁、列车和轨道子系统各种参数的影响。为了深入了解每个参数对目标函数的贡献,在以下六个非维归一化参数的基础上进行了灵敏度分析:桥梁刚度REI、桥梁阻尼Rhalpha;、轨道床刚度RKrb,轨道床阻尼RCrb,列车刚度RKt,和列车阻尼RCt。
在等效桥梁刚度EI和刚度比例瑞利阻尼系数alpha;[alpha;是Eq。(3)]中的常数因子],轨道床刚度Krb和阻尼Crb,和列车悬架刚度Kt和阻尼Ct的参数。初始基线有限元模型,如'铁路桥初始有限元模型'一节所述,而E#39;I#39;,alpha;#39;,k#39;rb,C#39;rb,K#39;t,c不表示在指定范围内的相应参数变化。如Eq。(9)所示,E#39;I#39;和alpha;#39;在0。5到1。5之间变化,即相对于ei和alpha;的参考值,最大减少或增加50%。在实际中,K#39;rb、C#39;rb、K#39;t和Ct的值容易出现相对较高的不确定性,因此给出了从0。1到10的较大变化范围,即相对于其相应的参考值,最大减少或增加10倍。
图7说明了灵敏度分析过程。在中跨点的桥梁位移和加速度时间历史是使用制定的有限元模型计算的,在列车转速v=16.09、32.18、48.27、64.36、80.45、9654和112.63千瓦时(或10、20、30、40、50)的参数变化。,60米和70英里)。根据联邦铁路局的说法,速度是根据5级轨道上129千米赫(80米)货运列车的最大可能运行速度限制来选择的。然后,利用Eq。(6)中定义的目标函数来评价曲线(i)和曲线acc(i),其中y(tk)表示使用基线参数值获得的位移或加速度响应,Y(tk)表示使用不同参数值获得的位移或加速度响应。因此,目标函数值对于指定的参数越大,对该参数的敏感(或由该参数主导)就越敏感。图8-13在给定的变化范围内,针对
资料编号:[3265]



