考虑到最小碰撞风险的植树和清除指南外文翻译资料
2022-08-14 15:35:52
英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
考虑到最小碰撞风险的植树和清除指南
Christine E. Carrigan, T. Olaf Johnson, and Malcolm H. Ray
项目改造越来越多地引入景观元素,以增加项目的美感。尽管可以有效改善美观性,但在路边引入树木可能会增加致命或致残的撞车危险。通常,路边设计的目标是在实际可行的范围内将发生致命或致残的伤害事故的可能性降到最低。在获得树木提供的好处的同时,可能无法将这种风险降低到 AASHTO 的《路边设计指南》中所提到的水平,但是我们仍然希望了解树木的存在所带来的风险,并在风险与美学利益之间取得平衡。目前,《路边设计指南》中广泛使用的收益-成本方法在考虑树木时存在重大挑战。许多所谓的树木收益尚未或无法以美元来量化;这种缺乏使得收益-成本分析中的传统计量单位(即美元)不可用。本文提出了一种定量方法,用于评估各种树木间距和偏移量所造成的致命和致残的伤害风险。该方法可以应用于考虑植树或砍伐树木的任何道路,来量化当前和计划的树木定位的风险,从而可以就树木引入的风险以及风险是否大于收益做出明智的决策。
宽容路边的概念最早出现于1960年代(1),并在 二十世纪七十年代开始定期纳入高速公路设计中,从而发表了1974年AASHTO的《公路设计和与公路安全相关的操作规范》(即《黄皮书》)(2)和1977年AASHTO的《选择,定位和设计交通障碍指南》(即《障碍指南》)(3)。1974年的《黄皮书》是第一个正式采用宽容路边设计方法的书。在宽容路边方法中,设计师在设计路边时应优先考虑以下事项:
- 清除障碍物。
- 使障碍物可移动。
- 将障碍物移到不太可能被撞到的位置。
- 使用脱离装置以减少撞击障碍物的严重性。
- 屏蔽障碍物。
- 描绘障碍。
这种基本的设计理念已经指导了路边设计师近40年,并且是AASHTO的《路边设计指南》(RDG)直到 2011 年出版的所有版本的基础(4)。高速公路和街道上的改造项目越来越多地引入景观元素,以增加项目的美感。这些景观元素可能包括树木,灌木丛和其他植物;岩石和巨石;装饰墙;艺术作品和标志或字幕。尽管可以有效地提高美观度,但是树木和其他景观或路边元素的引入会在路边放置物体,这些物体可能会与清晰的区域设计概念冲突,并增加致命或致残的风险。在没有具体工程指导的情况下,这些安置问题经常变得分裂和政治化。不幸的是,通常在没有充分了解何时、何地或如何将这些项目纳入设计而不引入不适当的风险水平的情况下,就会做出包含或排除这些项目的决定。
RDG中提出的概念,设计和理念“不能也不应被纳入每个项目的整体中。”RDG中提出的指南“主要适用于新建或大型重建项目”(4,第 1-6 页)。通常,路边设计的目标是在实际可行的范围内将致命的和致残的伤害事故的可能性降到最低。在获得树木提供的好处的同时,可能无法将风险最小化到 RDG 中所隐含的水平,但是仍然希望了解树木的存在所带来的风险,并在风险与美学利益之间取得平衡。
收益-成本方法已在路边安全中使用了35多年,为了系统地平衡安全性改进与实施成本。收益-成本法将每种可行方案的风险降低(即碰撞成本降低)与资本成本增加(即建筑,维修和维护成本)进行了比较。尽管它被广泛使用,但是在考虑树木方面时,这种方法存在重大挑战。树木所提供的许多好处尚未被量化或无法以美元来量化,从而使传统的计量单位(即美元)不可用。此外,降低风险的收益通常会增加给社会,而建设改造成本则由开发商,市政当局或设施所有者承担。将风险评估与收益-成本评估分开,可以直接考虑不同植树或安置方案之间的风险降低。
用户可以在第三版《路边安全分析程序》(RSAPv3)(5)中轻松获得成本效益和风险评估工具。这项研究量化了各种树木间距和偏移量替代方案中的风险。本文提出了一种定量方法,用于评估各种树间距和偏移量所造成的致命或致残的伤害风险。这种方法可以应用于考虑植树或砍伐树木的任何道路, 以量化当前和计划的树木定位的风险,从而可以对树木造成的撞车风险以及该风险是否大于收益做出明智的决策。
风险分析
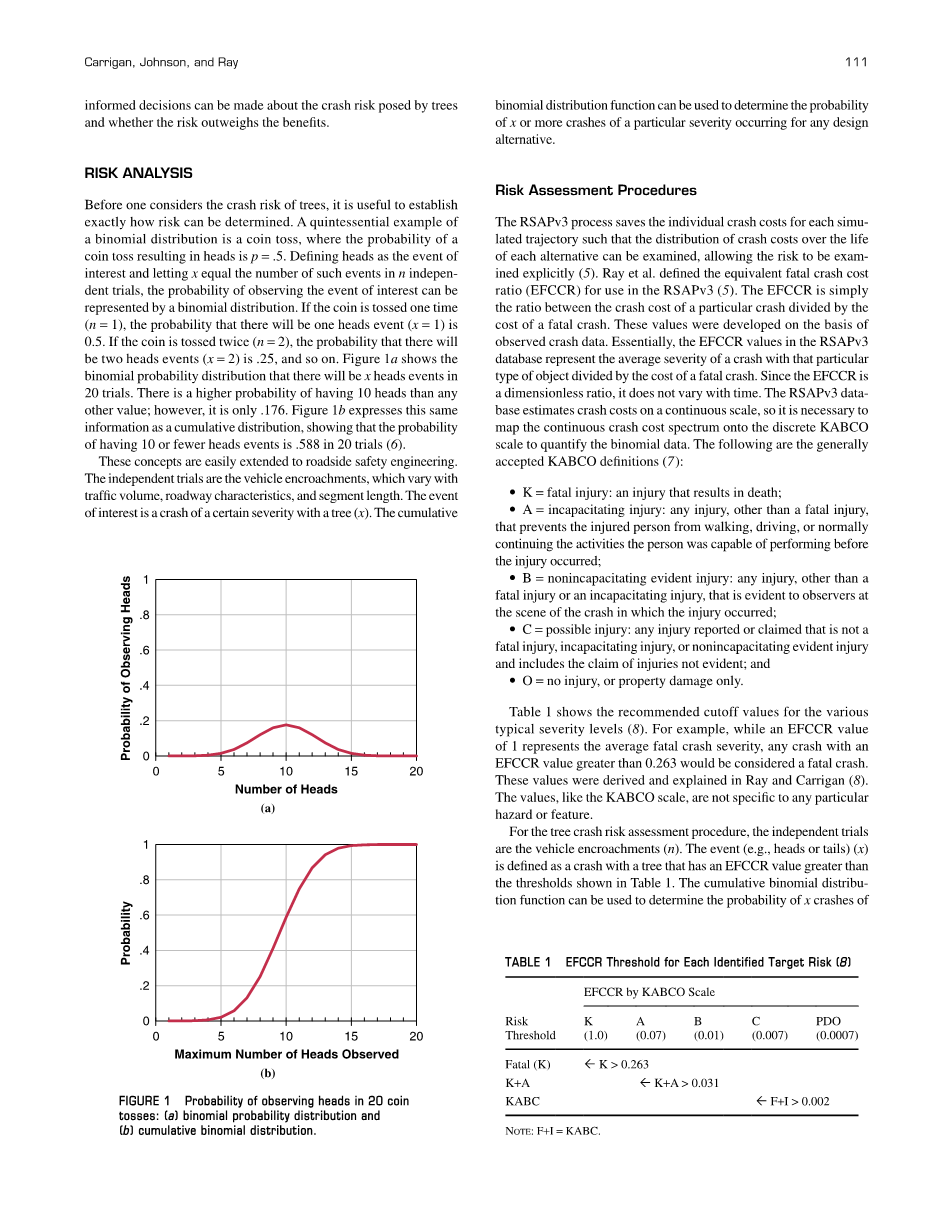
在考虑树木的碰撞风险之前,如何准确确定风险很有用。二项式分布的一个典型示例是抛硬币,其中抛硬币导致正面的概率为p=0.5。在 n 次独立试验中将heads定义为关注事件,并使x等于此类事件的数量,则可以通过二项式分布表示观察到关注事件的概率。如果抛硬币一次(n=1),则发生一次正面事件(x=1)的概率为0.5.如果将硬币掷两次(n=2),则将发生两次正面事件(x =2)的概率为0.25,依此类推。图 1a 显示了在20个试验中将发生 x次正面事件的二项式概率分布。具有10个正面的可能性比任何其他值都高;但是,只有0.176。图 1b 用累积分布表示了相同的信息,表明在20次试验中发生1 次或更少的heads事件的概率为0.588。
这些概念很容易扩展到路边安全工程。独立试验是车辆侵占,其随交通量,道路特征和路段长度而变化。感兴趣的事件是有一定严重程度的撞树事故(x)。累计二项分布函数可用于确定针对任何设计替代方案发生的 x 次或发生更多特定严重程度的车祸的可能性。
风险评估程序
RSAPv3流程为每个模拟轨迹节省了单独的碰撞成本,因此可以检查每个替代方案整个生命周期内的碰撞成本分布,从而可以明确地检测风险(5)。定义了在RSAPv3中使用的等效致命碰撞成本比率(EFCCR)(6)。EFCCR只是特定碰撞的碰撞成本除以致命碰撞的成本之间的比率。这些值是根据观察到的碰撞数据得出的。本质上,RSAPv3数据库中的EFCCR值表示该特定类型对象的碰撞的平均严重程度除以致命碰撞的成本。由于EFCCR是无量纲的比率,因此它不会随时间变化。RSAPv3数据库以连续规模估算事故成本,因此有必要将连续事故成本谱图映射到离散的KABCO规模上,以量化二项式数据。以下是公认的KABCO定义(7):
K=致命伤害:导致死亡的伤害;
A=致残伤害:除致命伤害以外的任何伤害,它能防止受伤的人行走,驾驶或正常地继续其在受伤发生之前的活动;
B=无伤势的明显伤害:除致命伤害或致残伤害,对于发生伤害的事故现场的观察者来说是显而易见的以外的伤害;
C=可能造成的伤害:报告或声称的任何不是致命伤害,无行为能力的伤害或无行为能力的明显伤害,包括不明显伤害的索赔;
O=无伤害或仅财产损失。
表1列出了各种典型严重性级别的建议临界值(8)。例如,虽然EFCCR值为1表示平均致命碰撞严重性,但任何EFCCR值大于0.263的碰撞都将被视为致命碰撞。这些值在Ray和Carrigan(8)中得出并解释。这些值(如KABCO量表)并非特定于任何特定的危害或特征。
对于树木碰撞风险评估程序,独立试验为车辆侵占(n)。事件(例如,头或尾)(x)被定义为树木的EFCCR值大于表1所示阈值的树的碰撞。累积二项分布函数可用于确定x次碰撞的概率严重性高于任何可替代的设计。该程序可以计算预期风险,但是,它没有确定可接受的风险级别。
可接受的风险目标
收集了从1989年至2008年缅因州的单车树木碰撞数据,并确定了碰撞严重性分布。缅因州有22,882英里的道路,以及大约50,000英里的边路(9)。表2提供了每个伤害严重性级别的树木碰撞严重性分布,每年树木碰撞和每年每边英里的树木碰撞。在1989年至2008年的20 年中,缅因州的驾驶员平均每年发生0.0005致命 0.0026致残=0.0031K A撞车/边际英里/年。现有的K A碰撞风险提供了可衡量改进的基准。例如,如果在缅因州提出了一项改善计划,该计划将使树木碰撞的风险从目前的全州水平增加,那么该项目将导致更多致命和致残的树木碰撞。相反,如果建议保留一些树木的项目,但是因树木致死和致残的事故风险低于目前的全州平均水平,则该项目将导致较少的事故发生。
累积二项分布函数可用于确定对于任何树木位置替代都发生x碰撞的概率。分析需要独立试验的(n) (即车辆侵占)以及树木位置的可能变化,这将造成EFCCR值高于表1中所建立阈值的树的碰撞次数(x)。已建立的风险目标提供了用于确定何时发生一棵树有不合理的风险的基准。这些目标在此处用于演示目的。每个管辖区都应确定其现有风险并建立自己的目标。
树木风险分析示例
对于使用 RSAPv3的多种放置方式,都考虑了树木被撞的可能性(5)。图2通过树线(即树木的连续线)绘制了0.0031的现有风险,距离55英里/小时的高速公路从行进路线偏移
0到30英尺。对于此分析,仅在路边考虑树木,而不在中间位置考虑树木。任何低于风险边界线的补偿和侵占组合,其风险都将低于缅因州目前发生K A树木碰撞的风险。超出边界的任何点都超过当前风险。
相反,如图 3 所示,未划分的公路分析考虑了两棵树木偏离道路的情况,并以20英尺的增量递增(即 20、40、60,...,200 英尺)。该分析最终由两部分组成,其中将现有风险0.0031的边界绘制在图4中。该图适用于任何45英里/小时的未分割高速公路。下降到风险边界线以下的间距和侵占组合的风险将低于缅因州当前发生K A树木碰撞风险。在边界上方绘制的间距和侵占组合将超过当前风险。可以通过对较小的树间距增量进行更多分析来获得较少波动的图表。
例如,一个项目正在考虑在一条未分割的 45 英里/小时的道路两侧种植树木,沿道路树木间间隔100英尺。该位置的交通量为每天5,000辆车,道路水平曲线为3°,坡度为2%。分析人员可以参考图5以获得每年5,000辆车的日平均每日通行量,然后沿着与相交的曲线相交的那条线表示未分割道路的侵占情况。
如果道路是平直的,图 5 提供了在此交通量下的侵占人数估算,将会预计流量为5,000 辆/天,每年侵占1.3英里/边英里。巷道的几何特征将影响侵入,因此应在风险分析中予以考虑。在文献中有许多侵占调整因素来解释巷道几何形状。Ray等人总结了许多这些调整因素。在 NCHRP22-27(5)中。
为了进行演示,在图6中显示了对水平曲率和垂直坡度的侵占度调整。在该图中,正值表示沿考虑中的行进方向的右弯曲曲线,负值表示沿考虑中的行进方向上的左弯曲曲线。对于此示例,水平曲线的值为3°。对于图6a中3°的水平曲率,位于曲线外部的树木的调整将为1.25,位于曲线内部的树木的调整将为1.1。此示例的垂直等级为2%;因此,没有根据图 6b调整垂直坡度。
因此,位于曲线外侧的树木的年度侵占/边缘英里/年的估计总数为1.3bull;1.25 =1.63,而位于曲线内侧的树木的估计总数为1.3bull;1.1=1.43。了解估计的入侵和所需的树间距后, 即可使用图 4。图中的绿色三角形代表位于曲线外侧的树木;蓝色的星星代表位于曲线内侧的树木。
图 4a 中的蓝星(即距离行车道8英尺处的树木)刚好在风险边界上方,绿色三角形同样在风险边界上方,这表明种植在车道边缘和人行道之间的树木会表现出一定的风险。K A 碰撞的风险高于当前全州平均风险。图4b中的绿色三角形和蓝色星形(即距离行人通道15英尺的树木)在风险边界以下;因此,在距离人行道15英尺的人行道后方 100 英尺远的地方植树将导致K A树木碰撞的风险低于全州平均水平。
在另一个示例中,正在考虑在一条55英里/小时的高速公路上进行维护项目,工程师想为路标的外侧边缘推荐一个合适的树线位置以保持或减少当前风险。该位置的交通量为20,000 辆/天,道路在里程表方向增加的向右倾斜度为6°,在里程表方向增加的坡度为 5%。分析人员可以参考图7,每天的车辆流量为20,000辆,然后沿着一条直线与表示相交道路数量的曲线相交。
如果道路是平直的,则此方法可以估算在此交通量下的侵占人数。预计每天20,000辆车的通行量将达到1.9侵占/边沿英里/年。与第一个示例一样,巷道的几何特征将影响侵入, 因此应在风险分析中予以考虑。再次参考图6,该示例的水平曲线在里程表方向的增加的右侧倾斜度为6°;因此,对于位于递增的右边缘的树,将调整为1.25,并且对于位于递减的右边缘的树调整为1.5。此示例中不断增加的里程碑方向上的垂直坡度为5%。在参考图6b的车道垂直坡度后,在里程表增加方向上将调整为1.12,在里程表减少方向上调整为1.28。
因此,对于增加的里程碑右边缘,每年的侵占数/边缘英里数/年估计为1.9bull;1.25bull;1.12=
2.66,对于减少的里程碑右边缘则为 1.9bull;1.5bull;1.28 = 3.65。了解估计的侵占后,图 2 可用于确定树线距道路的距离。为使K A伤害的风险保持le;0.003,树木线应至少距离增加的里程碑右边缘上的道路12英尺,距离减少的里程碑右边缘上的道路18英尺。
结论
审查了撞车数据和里程日志,以确定缅因州当前致命和致残的伤害性撞树风险为 0.0031。RSAPv3流程用于生成与树间距和典型偏移量相关的K A风险。绘制了风险边界以生成通用数字,决策者可以使用这些数字来确定任何项目考虑的植树方案是否高于或低于全州范围内当前的平均树木碰撞风险。通过使用当前可用的工具,可以将该方法扩展到任何管辖范围。因此,该过程将遵循相同的步骤:
步骤 1.通过边缘英里确定辖区当前致命和致残的伤害性树木碰撞的风险。
步骤 2.使用RSAPv3风险分析模块或其他可用于1-mi道路段的工具,在辖区内典型的树间距和偏移量范围内模拟K A碰撞的风险。
步骤 3.绘制间距和偏移量组合超出当前风险的位置(或设置当前风险以外的目标)。
步骤 4.使用在第3步中生成的图,图5至7以及文献中提供
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[235259],资料为PDF文档或Word文档,PDF文档可免费转换为Word



