多项式参数曲线(PPC-CURVE)高速公路水平几何设计外文翻译资料
2022-11-04 16:34:43
英语原文共 10 页,剩余内容已隐藏,支付完成后下载完整资料
多项式参数曲线(PPC-CURVE)高速公路水平几何设计
G. Bosurgilowast; amp; A. Drsquo;Andrea
意大利墨西拿大学土木工程系
摘要:在道路设计中使用过渡曲线是使曲率逐渐演变的一种解决方案,同时提高驾驶员的舒适度,并为曲线提供良好的视觉感受。目前,回旋曲线是道路设计中应用最广泛的过渡曲线,因为它确保曲率与对准的其他几何元素的连续性。
然而,几项研究允许使用多项式函数作为回旋曲线的替代。 根据允许的车辆道路动力学的验证而来。
过渡曲线的多项式解可作为一个传统解决方案的宝贵替代方案(第一过渡曲线,圆弧,第二过渡曲线)。
本文提出了公路对齐设计的五次多项式参数曲线(PPC曲线)。对实际高速公路几何设计中复杂几何问题的理论解析进行了分析。关于这个问题,还引入了与项目需求相关的多项式解的灵活性的形状参数。
为了实施该程序,已经开发了一个原始的计算机程序。并且已经进行了数字应用以与传统的解决方案进行比较。
1引言
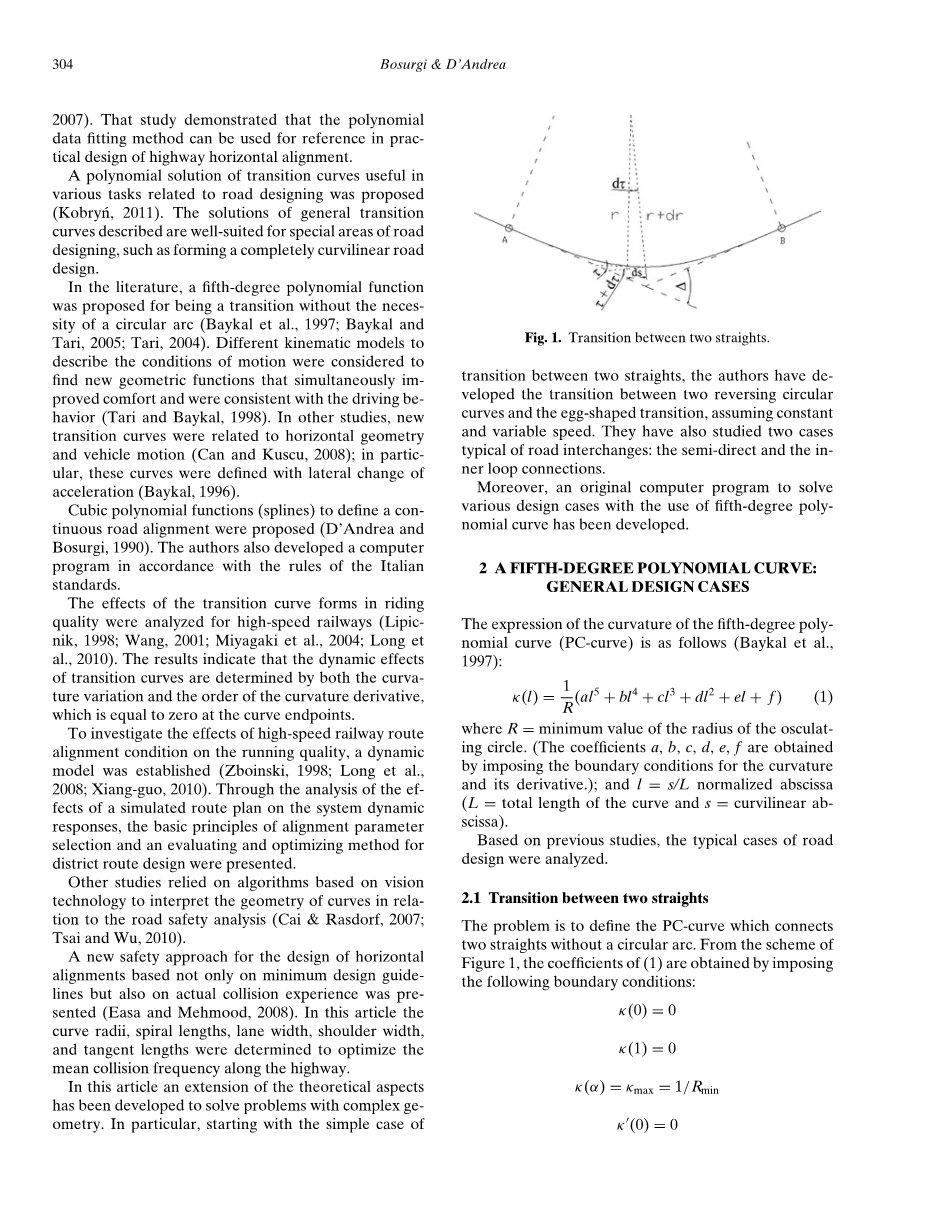
路线几何设计的现代标准是基于提供曲率连续趋势的解决方案,同时与运动的动态变量保持一致,以确保舒适性和安全驾驶。在设计实践中,几个机构,在直线和弯曲圆形之间的过渡部分,而对于视觉感知和司机的转向路径,规定了使用螺旋形过渡曲线,以便对其进行自然接近(美国国家公路和交通运输官员协会,2004年)。过渡曲线的引入确保对准半径逐渐变化,从而确保逐渐的横向加速度。这种情况导致在径向加速度变化率方面可以量化改善舒适度(Fwa,2006; Rogers,2003)。
然而,道路设计中的问题不仅是由于径向加速度的变化率,而且还是由于车辆在曲线内的轨迹的分散。曲线的瞬间变化应该通过瞬时转向来实现(这显然是不可能的,因为每个人都需要一段时间,而且驾驶员不会马上意识到道路几何变化)。随之而来的选择路径可能会导致道路安全问题。在这方面,使用过渡曲线是有效的,因为它允许转向操纵的渐变,因此降低驾驶员处理不当的风险(Gilbreel等,1997)。
尽管道路设计中使用最多的过渡曲线,但回旋曲不能保证在舒适性方面的高性能。事实上,众所周知,使用回旋曲线作为过渡曲线,运动学和动态变量(径向加速度,转向速度,转速)的变化是不连续的。
在道路设计中使用多项式函数作为回旋解决方案的替代方法已经进行了若干研究。
多项式对齐解决方案不是最新的。问题的第一个方法是用多项式曲线代替传统的直线和圆圈(Nutborne,1968; Calogero,1969)。
基于最小二乘法的原理,将多项式数据拟合方法应用于公路水平对准设计(Changping,2007)。该研究表明,多项式数据拟合方法可用于公路水平对准实际设计中的参考。
提出了有关道路设计相关各项任务的过渡曲线多项式解(Kobryn,2011)。所描述的一般过渡曲线的解决方案非常适合于道路设计的特殊领域,例如形成完全曲线的道路设计。
在文献中,提出了五阶多项式函数作为不需要圆弧的转变(Baykal等,1997; Baykal和Tari,2005; Tari,2004)。考虑了不同运动学模型来描述运动条件,找到同时提高舒适度并与驾驶行为一致的新几何函数(Tari和Baykal,1998)。在其他研究中,新的过渡曲线与水平几何和车辆运动有关(Can和Kuscu,2008); 特别地,这些曲线被定义为加速度的横向变化(Baykal,1996)。
提出了定义连续道路对齐的立方多项式函数(样条)(DAndrea和Bosurgi,1990)。作者还根据意大利标准的规则制定了计算机程序。
分析了高速铁路过渡曲线形态对乘坐质量的影响(Lipicnik,1998; Wang,2001; Miyagaki et al,2004; Long etal,2010)。结果表明,过渡曲线的动态效应由曲率变化和曲率导数的阶数决定,曲线导数在曲线端点处等于零。
为了研究高速铁路线路对准条件对运行质量的影响,建立了动态模型(Zboinski,1998; Long et al。,2008; Xiang-guo,2010)。通过分析模拟路线规划对系统动态响应的影响,提出了对齐参数选择的基本原理和区域路线设计的评估与优化方法。
其他研究依赖于基于视觉技术的算法来解释与道路安全分析相关的曲线几何(Cai&Rasdorf,2007; Tsai and Wu,2010)。
提出了一种基于最小设计指南,而且基于实际碰撞体验设计水平对齐的新安全方案(Easa和Mehmood,2008)。在本文中,确定曲线半径,螺旋长度,车道宽度,肩宽和切线长度,以优化沿高速公路的平均碰撞频率。
在本文中,已经开发了理论方面的扩展来解决复杂几何的问题。特别是,从两条直线之间的简单的过渡开始,作者开发了两个反转圆形曲线和蛋形转换之间的转换,假定恒定和可变速度。他们还研究了两个典型的交换机:半直接和内循环连接。
此外,已经开发了使用五次多项式曲线来解决各种设计案例的原始计算机程序。
2五度多项曲线:一般设计案例
表示五次多项式的曲率曲线(PC曲线)如下:
其中R =密切圈半径的最小值。(系数a,b,c,d,e,f通过施加曲率的边界条件及其衍生物。);和l = s / L标准化横坐标(L =曲线的总长度,s =曲线横坐标)。
根据以往的研究,典型的道路案例分析设计。
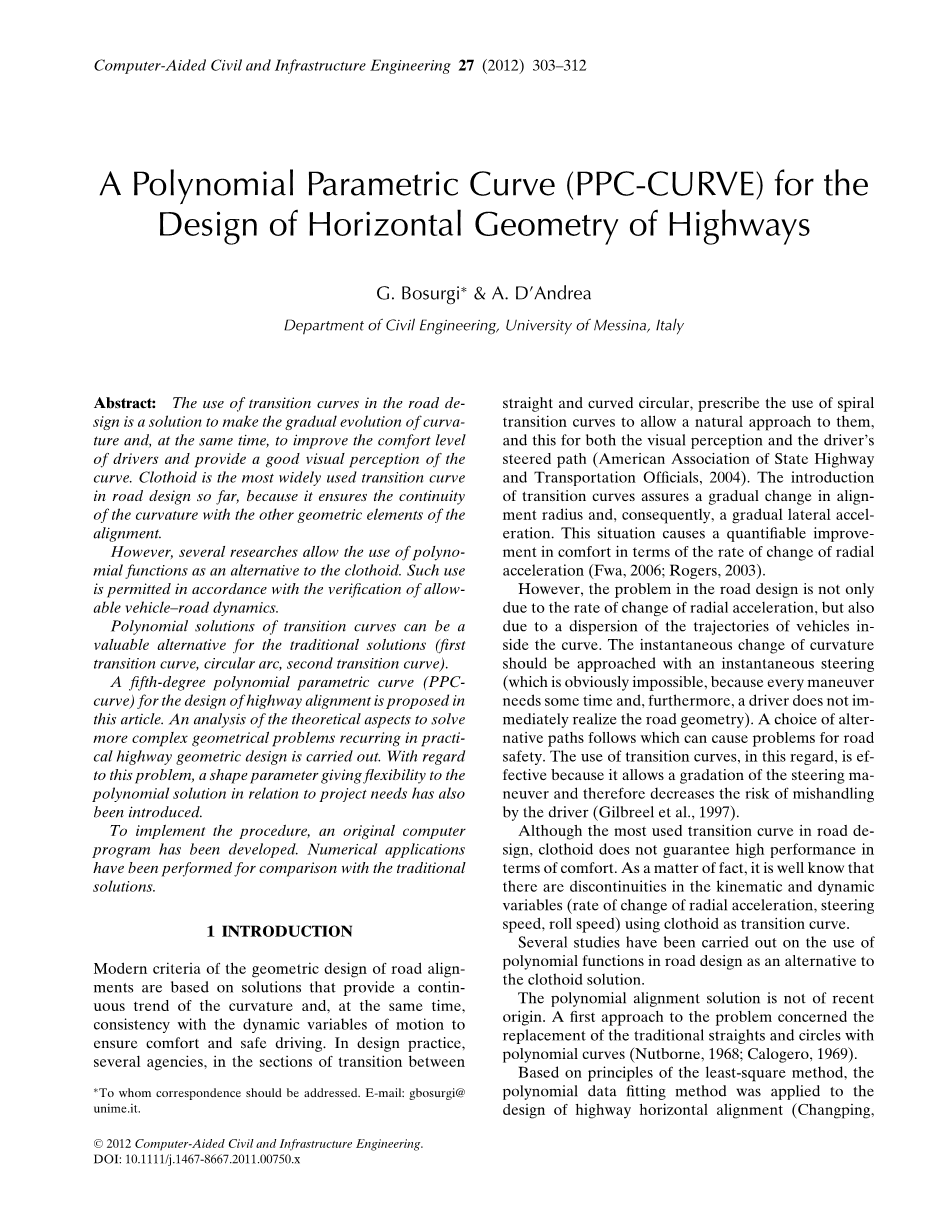
2.1 两条直线之间的转变
图1. 两条直线之间的转变
问题是去定义连接两个没有圆弧的直道的PC曲线。从方案图1,(1)的系数是通过以下边界条件获得的:
(alpha;=最大曲率点的标准化横坐标或定位圆的位置R =Rmin)
前两个条件需要在切点A和B处的曲率的连续性。第三个条件是分配最大曲率的位置。最后三个条件要求A,B和alpha;是点曲率函数的相对最大值或最小值。
假设边界条件e = f = 0和等式(1)改变如下:
对于对称的情况(alpha;= 0.5),a = 0,因此,它导致:
参考图1,PC曲线的偏离角度,结果是:
并设定tau;(l)=alpha;,总长度为
(theta;=直线偏离角)。
对于alpha;= 0.5,导致
因为dx = costau;ds = costau;Ldl和dy = sintau;ds =sintau;Ldl获得曲线的参数方程由泰勒系列展开:
图2显示了曲线的几何尺寸。
与切圆的中心相切的距离R = Rmin:
切线偏移到圆形圆的中心且R = Rmin:
图2. 几何曲线
X(alpha;)= XRmin和Y(alpha;)= YRmin是坐标的最大曲率点。
切线偏移:
长切线:
短切线:
在一些标准中,特别是意大利道路标准,在回旋曲线之间需要预留一个最小长度等于所覆盖的距离2.5秒的圆圈。使用PC曲线不被允许满足隐含的这个要求。 作者认为这个要求对于这种方法是不重要的,因为与回旋解决方案相比,它允许几何和动态变量的逐渐变化。但是,要符合标准要求,有两种可能性。第一个选择是在回旋曲线解决方案之间的两条直线之间插入一个圆圈,但这不是很合适。第二个选项是正确选择R = Rmin的圆弧的半径和位置,以确保曲线的正确感知。
2.2 蛋形过渡
在这种情况下,问题是两个圆沿同一方向覆盖的连接。输入数据是两个圆的半径(Ri和Rf)和段M1M2的长度(图3)的值。
图3. 蛋形过渡
2.2.1边界条件
因此,曲率方程如下:
总长度通过求解以下等式获得:
其中xf和yf是曲线端点的坐标。
从图3可以看出圆弧的残余弧线在:
图4. 两个反转循环曲线之间的转换。
2.3两个反转圆弧曲线之间的转换
这种情况与之前的情况相似,圆圈沿着相反的方向被覆盖(图4)。
2.3.1边界条件
曲率的表达式由等式给出(15),曲线的长度通过求解得到以下等式:
与之前的情况类似,两个周长如下:
图5. 半直接连接
2.4半直接连接
这是交换连接的典型情况(图5)。在图5的方案中,PC曲线是在直径和半径为Rf的圆之间。
除了半径的值外,还有必要知道距离Ym(x轴与圆的中心之间的距离)。
2.4.1边界条件
因此,曲率的表达是
长度L是通过要求纵坐标得到的在端点处的圆形圆的中心该曲线等于Ym:
此外,它导致:
RRI=残余直线的长度,gamma;=角度在连接半径为Rf的切圆的中心的线和切线的起点之间输入。
Au =圆的残余弧。
图6. 内环连接
2.5内环连接
像以前的情况一样,这个解决方案是交换连接常用的(图6)。特别是,让我们在形成非常高的偏差角()的两个直线之间建立连接,有时超过270°。
2.5.1边界条件
在这种情况下,曲率在半空间中定义kappa;gt; 0,PC曲线长度如下:
从图6可以得到以下结果曲线几何尺寸:
顶点V与第一直线曲线切线点之间的距离:
顶点V与第二条直线上曲线切点之间的距离:
切线偏移:
3动态参数
从上述可以看出,PC曲线在道路几何和功能设计方面的潜力很大。特别是这种方法在定义整体道路对齐是非常有效的。然而,曲率的数学表达式(等式1)显示了固定边界条件的解的唯一性。这对于需要设计解决方案的灵活性的实际应用来说是一个重要的限制。关于这个问题,提出了改变PC曲线的形状和长度的参数beta;; 因此,曲率的新表达式定义为:
图7. PPC曲线的曲率变化与beta;(alpha;= 0.5)
图8. PPC曲线几何与beta;(alpha;= 0.5)
图7和8显示了PPC曲线(多项式参数曲线)与beta;的曲率和几何形状的变化。
图9. 几何曲线
图10. 曲率变化
图11. 径向加速度变化的横向变化。
图12. 转向速度图
4数值实例
4.1切线与圆弧曲线之间的转换(恒速情况)
关于乡村道路曲线设计的应用,已按照意大利标准进行开发。但是,解决方案的灵活性与其他国际标准不兼容。输入数据如下:
bull; = 0.83298 rad(切线偏差角)
bull;Vp = 100 km / h(设计速度)
bull;Rmin = 438 m(圆的半径)
bull;alpha;= 0.5(最大变形对称情况点的标准化横坐标)
从等式(3)可以看出,L = 684.085m(PPC曲线的总长度)。这个应用程序也是用回旋解决方案(回旋 - 圆 - 回旋)开发的。在下图中显示了两种解决方案的结果。
特别地,在最大曲率点(图9),两个对准几乎一致,小于小的偏移(lambda;=3.06mu;m)
这两种解决方案符合意大利标准; 然而,与回旋曲线解决方案不同,PPC曲线确保曲率的连续性(图10)和动态参数(图11和12)。该解决方案提供大于回旋解决方案的z(l)(图11)和˙theta;(l)(图12)的最大值,给出了在极值处为零值的逐渐和连续趋势(l = 0 和l = 1)。这样可以增加驾驶时的舒适度。
非对称解决方案经常用于设计,以处理环境背景下产生的特殊情况。在这些情况下,当使用回旋曲线时,A参数的不同值被设置为相当于过渡曲线不同长度的输入和输出。对于PPC曲线,通过以适当的方式设置alpha;的值,即刻蚀圆的位置,可以容易地管理非对称的情况。这相当于获得相对于曲线的总长度的最小半径的点处于非对称位置的连接道路。此外,还可以介绍形状参数beta;,解决方案可以根据设计的需要进行优化。
4.2切线与圆弧曲线之间的转换(变速箱)
在可变速度条件下开发了相同的应用。 在这种情况下,输入数据如下:
bull; = 0.83298 rad(切线偏差角)
bull;Vp1 = Vp2 = 100 km / h(切线设计速度)
bull;Vpc = 80 km / h(圆周设计速度)
bull;Rmin = 252 m(圆的半径)
bull;alpha;= 0.5(最大变形对称情况点的标准化横坐标)
在减速度和加速度方面,纵向加速度假设为恒定,最大值为0.8 m / 。在PPC解决方案中,已经分配了最大曲率点(alpha;= 0.5)的最小速度,并且已经获得对应于形状参数beta;= 1的393.58m的总长度。
图13. 几何曲线
图14. 曲率变化
图15. 径向加速度变化率
图16. 转向速度图
如前所述,应用程序也是使用超回旋曲线作为过渡曲线进行的。通过这种方法,总长度为418.13m。设置
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[140379],资料为PDF文档或Word文档,PDF文档可免费转换为Word



