基于激光扫描仪的水面无人智能船的港口保护:实验结果及分析外文翻译资料
2022-09-29 10:13:50

英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
基于激光扫描仪的水面无人智能船的港口保护:实验结果及分析
托马斯·J·帕斯托雷 安德鲁·N·帕崔卡拉其斯
北约海底研究中心(NURC) 自由学者
拉斯佩齐亚,意大利 佛罗里达州绿湾温泉
pastore@nurc.nato.int anrp@anrp.org
摘 要
在如今的研究中,已经表明水面无人智能船(ASV)在一定情况下能够达到对港口的保护工作要求。这种智能船能够将现有的路面传感器功能范围进行放大,并且能够对潜在入侵者进行警告和威慑,将其驱离禁区。在此种背景下,ASV就必须要和具有生产力的港口达成一致性,用以对港口和拥堵的水道进行动态处理。对于近距离的目标来说,激光扫描仪式是一种相当有用的传感器,能够检测到近距离目标以保障无人船能够及时避障,同时能够实现靠近、对接以及对ASV的定位。本文提出了一种激光扫描仪在ASV的效用和局限性上的理论处理。通过成本效益分析比较得出:激光扫描仪具有与普通传感器相类似的用途,并同时提供了北约海底研究中心的无人船配备商业激光扫描仪的实验结果进行验证。ASV(一种4.7米的充气艇)的控制系统运行MOOS-IvP套件的开源软件。其能够将自定义模块添加到moos开源软件中,实现对目标对象的探测和跟踪。通过控制ASV上的控制计算机,能够控制ASV的任何行为。因此,通过检测到对象,能够避免或者接近障碍物。
关键词:无人驾驶车辆、防碰撞、港口保护
第一章 简介
北约海洋研究中心在无人水面智能船支持港口保护的工作始于2007年。在2008年和2009年完成了船舶的购置与地下传感器的探测等如下任务:
- 使用声呐进行海底扫描探测;
- 用于给潜水员提供高分辨率的识别率高的声呐图像;
- 用于检查基础设施和对可疑船只的表面识别;
- 用于护卫舰上的预警保卫。
这些能够分配给一个独立的船只的任务意味着在港口保护方面具有足够的自主性,而具有足够的自主性也意味着不需要运营商来进行持续的关注和干预。
这种自主性的一个重要方面就是能够使船舶与静止的障碍物和移动的障碍物之间保持安全距离(如码头、浮筒、其它船只等)。而在国防上具有另一个重要的方面,那就是能够使两艘船保持一定的接触距离,或者船与船之间具有一定间隙。这两个方面都具有一个警报值,这很符合工业用的激光扫描仪的功能。而相比之下,普通的导航雷达就需要人为的操作才能完成这样的工作。因为雷达通常不能有效地消除范围低于100米的传输隐患。
激光扫描仪是利用红外激光扫描其周围环境的光学传感器。这种传感器通常用于对一个机器或车辆附近危险区域监控。而传感器的工作原理是基于飞行时间的测量原理。在它工作时,发出非常短的光脉冲,在同一时间电子计数器测量传输和(可能)反射之间的延迟。当发射出的光脉冲遇到目标对象时,它将反射回传感器。接着从时间测量传感器计算其到测量对象之间的距离。此外,该传感器还包含匀速旋转的镜子,能够对光脉冲进行偏转处理。因此,能够扫描到一个半圆的区域。通过测量角度,能够确定激光扫描仪检测的对象的方向,进而确定目标对象的位置。用于NURC实验的特有激光扫描仪是来自于SICK AG 的LMS291型激光传感器。该传感器的测量范围约为80米,涵盖了180°的方位角的1厘米的分辨率范围和1°的方位角。因此,每一个的测量量是一个181个元素的向量,包含的量程是-90到 90。满量程的测量表明,在该方位角没有反射测量,而测量的任何小于满量程表示一个对象在该方位角和测得的范围内给出作为相应的元素的矢量。这些传感技术已经运用于地面机器人上。
PROVEX 09(实践、操作和实验验证是在2009年的12月的1-10)是一种多样性的耗资巨大的与目的港保护相关的应用。实验一个方面是NURC的两个ASV用来作为衔接港保护的一部分。这是作为第一个扩展在水面测试的架构,用于如上所述集成的激光扫描仪。一些脚本事件被履行,其中的一些特殊的则与激光扫描仪有关。其中一些涉及到对在港船只和固定物的避撞,另外的一些则涉及到另一艘船(通常在一个特定的规定距离内)。通过实验,可以在PROVEX 09上获得大量的实验数据,尤其是在实验的最后两天,为本文的分析提供了依据。
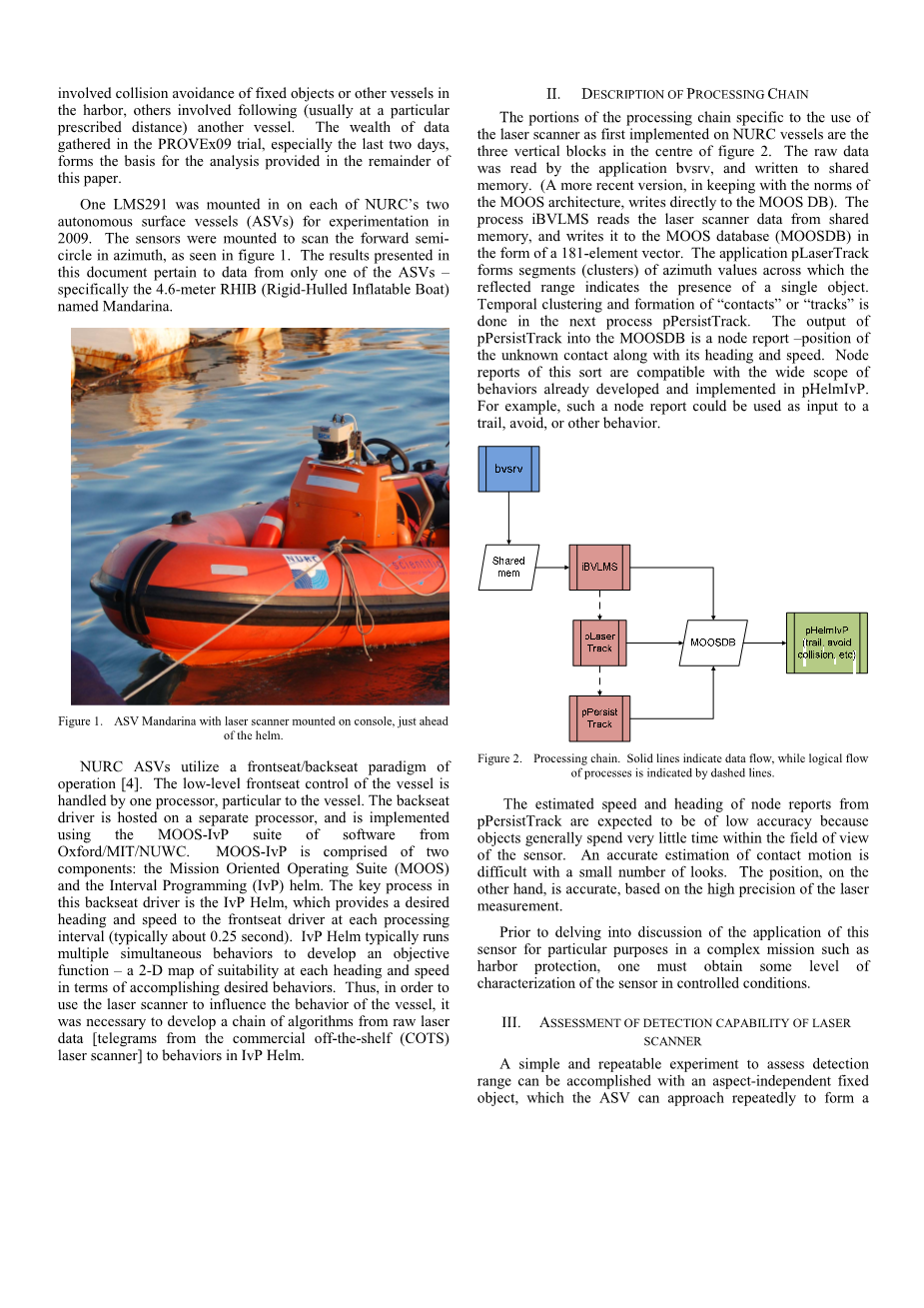
在2009年,进行了一个在NURC的两个无人水面艇(ASV)上安装LMS291传感器的实验。安装传感器的目的是用来扫描半圆方位,如图1所示。本文给出的结果属于数据来自于一艘特别命名为桑蚕的无人水面艇——4.6米的充气船(刚性船壳充气船)。
图1 安装在无人水面艇控制台上的激光扫描仪
NURC的无人水面艇采用的是前座、后座的操作形式。无人艇的低级别前座通过一个处理器来进行控制处理。副驾驶的管理是由另一个单独的处理器进行控制,并使用牛津/麻省理工/NUWC从软件MOOS-IVP套件来实现。MOOS-IVP套件由两部分组成:面向任务的操作套件(MOOS)和面向区域规划的控制套件(IVP)。其中IVP进行指挥工作,并给每个处理间隔提供所需的航向和航速(时间间隔大约0.25秒)。IVP通常能够运行多个并发的行为,通过建立一个目标函数来完成所需的各航向和速度适应的二维地图。因此,为了使用激光扫描仪来对船只进行扫描,有必要基于原激光数据开发一个在IVP上的链式算法。
第二章 加工链的描述
这部分对激光扫描仪的处理链的特定使用作为第一个实现NURC的船只的三个垂直中心如图2所示。由应用程序bvsrv来对原始数据进行读写和共享。(在最新版本中,通过与MOOS结构规范的连接,直接写入到MOOS的数据库中)。由iBVLMS来将激光扫描数据从内存中读取出来,并以181元向量的形式将其写入到MOOS的数据库中。应用plasertrack形式段(集群)的方位值过反射范围来表示单个对象的存在。时间聚类和“联系”或“路径”的形成由接下来的pPersistTrack过程来实现。pPersistTrack到MOOS数据库的输出是一个节点报告——伴随着它的航向和速度的未知的位置。这种节点报告与已制定和实施的phelmivp范围广泛兼容。例如,这样的节点报告可以用作输入、避免或其他的行为。
图2 流程图 实现表示数据流,虚线表示逻辑流程
从pPersistTrack中估计得到的速度和航向准确率低是因为在传感器的视场范围内,扫描到物体所用的时间很少。围绕着一个很小的数据来对运动进行准确估计是很难的。另一方面,高精度的激光测量得到的位置是准确的。在深入对这种传感器在复杂的任务如港口保护等特殊目的的应用研究之前,必须获得在受控条件下传感器的相关特性。
第三章 激光扫描仪检测能力的评价
通过一个简单且可重复的实验来评估检测范围,可以用一个固定对象来独立完成,其中无人水面艇可以形成多次的测量统计基础。特别是对于包含有五个系泊浮标的直径3米,高50厘米的工作区。这样一来,问题就变得容易多了。首先,因为ASV接近障碍的原因有两个:第一是单线激光大比例的测量反射回扫描仪,第二是障碍将跨在激光扫描仪的视角范围较大。其次这些因素将占主导地位。如果一个物体在这种情况下具有交叉的范围和直径,并且距离为D,则可以通过公式3.1计算出障碍物的角度范围。
(3.1)
在例子中,的值很小,则近似成立。检测的要求是,检测的物体必须跨越至少两个方位角(激光扫描仪的两个或多个相邻激光束必须适合于一条线)。这就意味着,一个3米长的对象预计将显示在85米的可追踪范围内(实际上可能是激光扫描仪的最大范围)。在实践中,这些对象被显示在激光扫描仪的最大范围为60米,平均43米的范围内(运用这种方法,他们在视野中逐渐由远及近)。
前文的分析是基于传感器和垂直轴稳定接触下进行的。事实上,该船只受到俯仰和滚转运动,针对的对象也受到一定程度地垂直摆动运动。传感器的垂直接受角度并不是固定不变的,但约为10°左右。如果传感器是固定的,则相同的关系适用于——与这次相反的方位分辨率垂直的角,如公式3.2所示。
(3.2)
当距离D为40米,角度为10°时,这相当于一个反射物体穿越过能见度为7米的垂直偏移。考虑到船舶运动时的情况更为关键。即使在相对平静的情况下,RHIB也能稳定的受到5°的俯仰和滚转运动。除了运动的海面,船的俯仰角会以高于它在静止水面的更高的速度增加以达到5°稳定状态。
在图3中,从实际的试验数据出发,显示了激光扫描仪的输出作为一系列的间隔在1°的白色线条大多数的线路显示的是全长,而有一些则显示较短。在这种情况下,由于测试对象是在不到30米的范围内,并跨越约8°的角。图3代表的是另一个MOOS开发应用程序得到的被称作iLMSView 的PROVEx09实验输出。在实时数据或者播放模式下,可以用这种简单的方法来查看。图4表示的是iLMSView随着船舶视频发送到岸边专用遥测链路,并记录在数字视频录像仪(DVR)后的分析。
图3 激光扫描 固定对象的位置显示
图4 以激光扫描仪为视角,以港口系泊浮标为视频
第四章 关于虚假报警性能的说明
回想之前的内容,激光扫描仪能够在没一次扫描中扫描到181个不同的测量范围,并且扫描速度大约在40HZ左右。一般情况下,激光扫描仪会产生非常低的噪声数据。这可以用两种方式来看待,在一个单一的扫描里,测量提供的虚假度数的而数量较低。随着船的前进到半圆扫描范围内(换句话说,就是在82米的范围内没有对象),预计所有的测量范围产量最大值。观察测试很快证实了在期望值的杂乱反射导致的范围内测量产生的最大值小于预期值不超过一。由于一定条件下的距离测量的数目必须取一个整数值,所以说,在一次扫描中,期望值为零。
虽然激光扫描仪进行完全扫描在25毫秒内(每秒40次扫描),但这个速度并不能在MOOS数据库中观察到。实际上,数据进入MOOS数据库的最大速率是由AppTick(应用速率)参数,指示在其中的应用周期——在这种情况下从传感器中读取数据并将其写入到MOOS数据库的最大速率决定。在试验过程中,此参数本设置为10(赫兹)。然而,这个速度并不能保证实现。它取决于其他处理器的可变负载,通过操作数小时的过程。通过观察得到,激光范围内的数据进入MOOS数据库的长期率为每秒6到7次扫描之间。
激光扫描仪性能的更广发的认知观点是在一个较长的时间内进行统计。这项评估是通过采取在每个扫描的181个测量向量的最小值。在过去的2天时间的实验期内,对这些长期统计数据进行评估的数据可供4小时左右的时间进行拆分。此数据的样本如图5所示,代表一个周期为一小时。大部分时间(超过94%),最小值与最大值相等,换言之,船的前半部在扫描半圆内。在这些情况下,观察到一个较小值时,有两种可能性——一个是对象被检测到;或者是虚假反射(噪声或误报)发生。Crossreferencing与其他传感器(主要是车载摄像机,而且雷达与GPS转发器报告赖在船只),它是可能制定详细的误报统计在数以万计的测量。
大多数与其他对象的接触时间比较长,它们在视野中显示为至少几秒钟以此,有时候是几分钟一次。这些时间(约标记在图5中)很容易被删除,从而考虑视为假警报,我们留下一个“假警报”或“虚假检测”在一个单一的扫描中的概率上线为0.5%。考虑到每秒约6次的扫描速度,假报警率的上限设为每36秒一次。然而,仔细检查船只与其他固定和移动的对象的确切位置,能够使我们减少更进一步的值。从最后一天的实验数据进行严格的分析,得出的结论是:每小时仅4次检测可以被认为是虚假的。曾经有相关人士提出过担忧,那就是在十二月的午后,太阳可能是干扰源。然而,这些虚假的检测是与太阳的角度相对独立下观察得到的。有趣的是,似乎虚假的检测可能大于实例中正常音调或运动的船舶——但统计数据并不支持这两个事件之间有任何关系。
第五章 高阶处理及其评估
从理论上讲最简单的执行任务,激光雷达装备与ASV是一个固定的物体,在水平尺寸上较短的物理范畴。ASV的定向路线会导致在碰撞或接近通过大型系泊浮标时作为一个期望的行为。实施高优先级的行为以避免与激光扫描仪中的对象碰撞。这种相同的策略和相同的行为对于移动的对象(其他船只等)的接触也是有效的。
图5激光扫描仪在一小时内的最小范围
在实验过程中,遇到的主要是其他类似大小的船只作为目标,并和作为系泊浮标的数量级相同。更确切的说,在实验过程中遇到的其他船只由其他4到6米和大约两米的梁的RHIBs或橡皮艇组成。此外,其它参与实验的ASV通常被视为接近一艘船体4米长,梁2米长的双体船。虽然这艘双体船的长度是类似于其他的船只,但其可见的鲜明特征是相当少的,因为它的上部结构是很低的。
在实践中,检测与规避(或其他指定的动作)这些船只是不同的系泊浮标。这是因为在接近固定对象时,相对速度的大小没有很大的不同。
蚕型ASV(携带激光扫描仪)的正常操作速度范围在1-3米/秒。其他的船只优势后会快于它,但却很少有这样的几何形状,在两者间的收盘速度显著大于3米/秒(6节)。值得注意的是,3米/秒的速度相当于在13秒的时间里对40米的范围进行检测。然而,一个比20米/秒还快的收盘速度需要进行评语,跟踪,并且要求在短暂的2秒内实现避撞。如图4和图6表示的是ASV随着激光传感器在iLMSView上的视频显示范围。
图6 激光与视频界面师徒,ASV船头
从图2的逻辑框图中可以看到,为了使ASV实现避障、跟踪,或者采取其他适当的行动来用激光扫描仪对目标对象进行检测,该对象必须生成“轨道”并且输入到MOOS数据库中。跟踪的第一阶段是形成对应于连续或近乎连续的扇形的方位线段。设置软件的阈值为60米外的激光返回数
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[150311],资料为PDF文档或Word文档,PDF文档可免费转换为Word



