基于集成传感器的智能机器人系统外文翻译资料
2022-09-30 11:35:00
英语原文共 12 页,剩余内容已隐藏,支付完成后下载完整资料
基于集成传感器的智能机器人系统
Spyros G.Tzafestas
摘要:这篇文章主要讲述了欧洲共同体ES-PRIT278项目的内容,主要涉及基于集成传感器(触觉加上视觉)的机器人系统在定位和方向领域内智能行动这一重要制造问题的开发。视觉系统被用于提供物体的工作地位置、方向的初始估计,便于机器人抓取物体。在抓取阶段,触觉传感器确认、修改和改进视觉系统提供的初始信息。现在项目处于最终阶段,集成组件展示出令人满意的性能。
简介
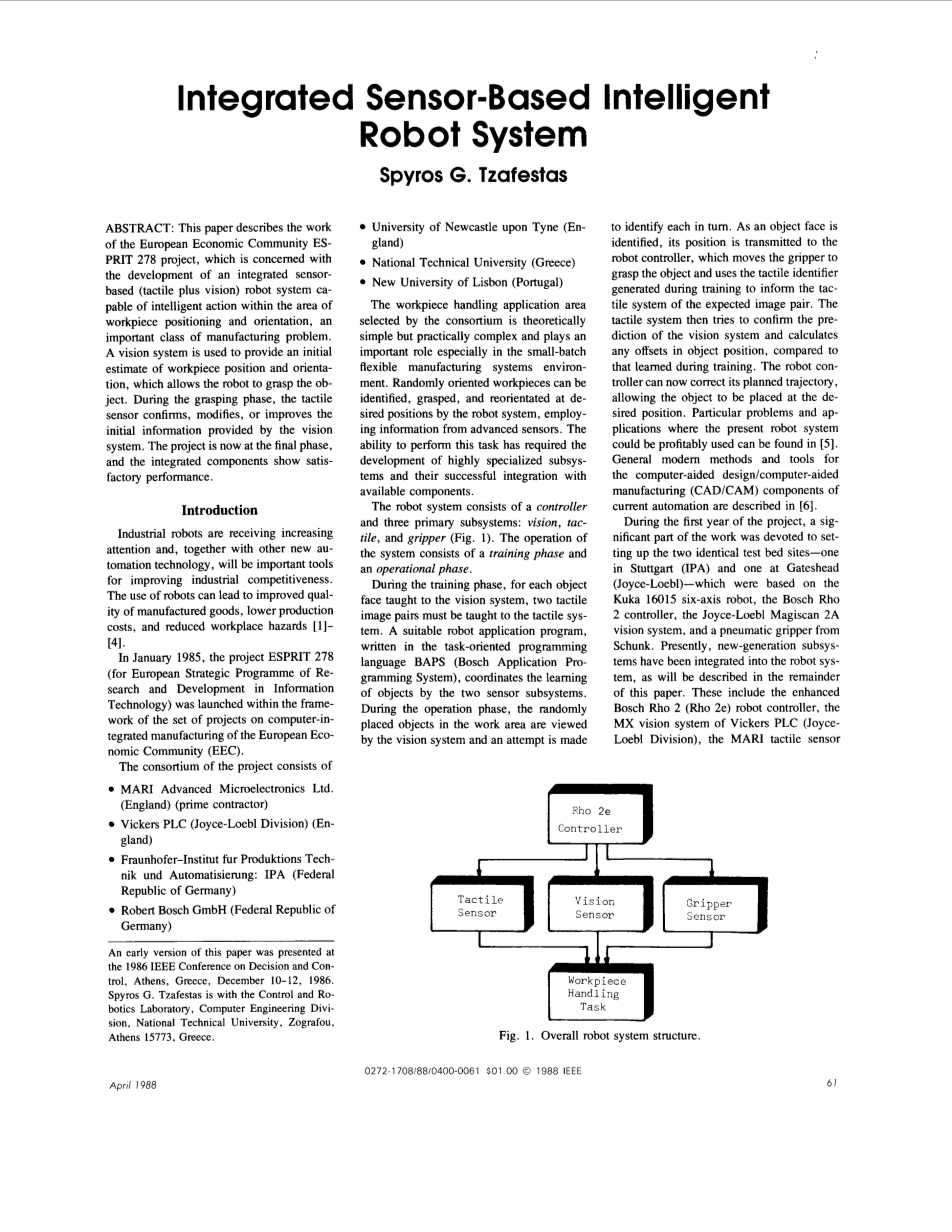
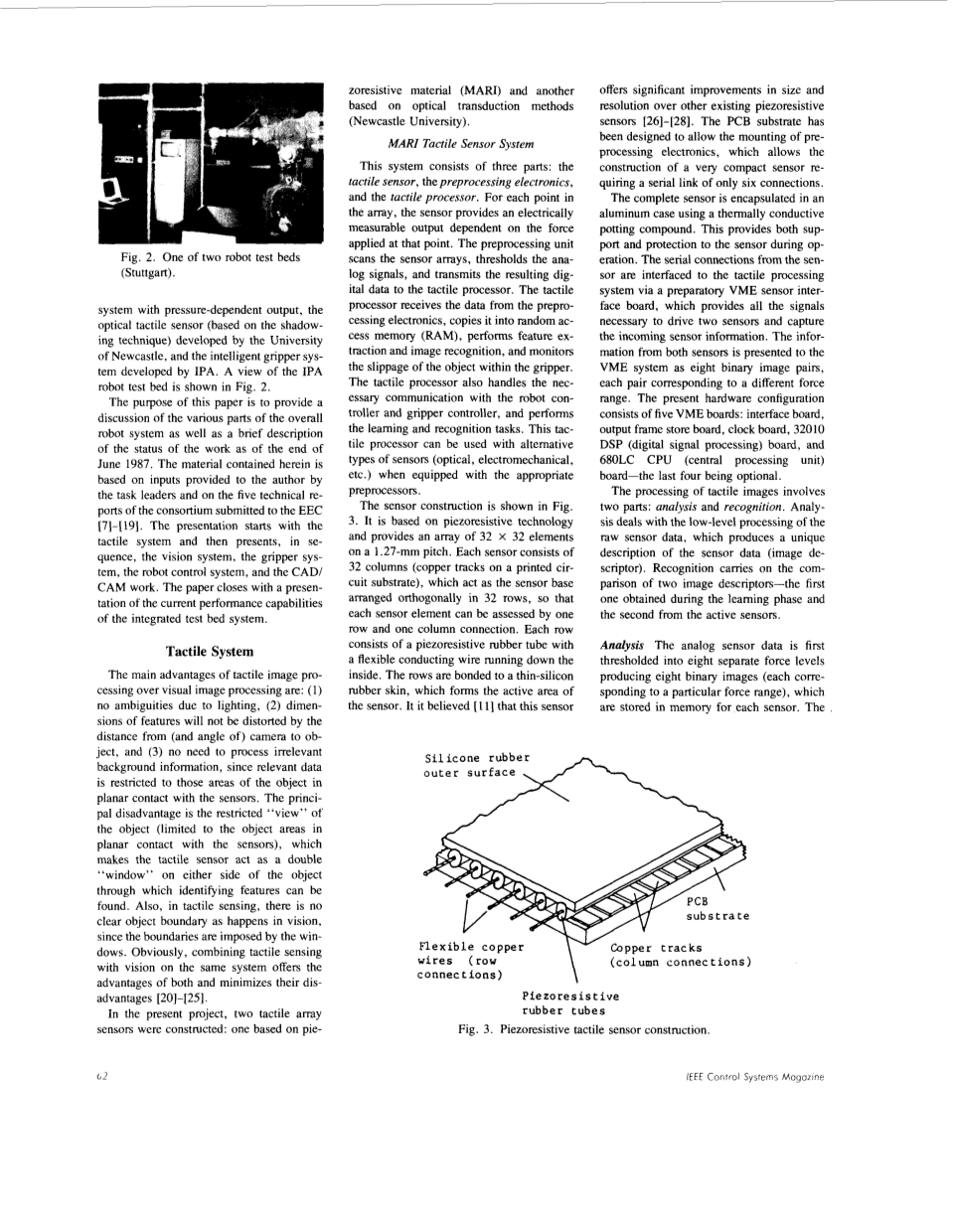
工业机器人越来越受到人们的关注,加上其他新的自动化技术,将是提高产业竞争力的重要工具。机器人的使用可以提高制成品的质量,降低生产成本,并减少工作场所的危害。 1985年1月,项目ESPRIT 278(为欧洲战略计划和信息技术研究的发展)在欧洲经济共同体(EEC)计算机触觉集成制造项目系列框架下启动。该项目的财团包括: MARI 先进微电子有限公司(英国)(承包商) Vichers PLC(Joyce-Loebl Division)(英国) Fraunhofer-Institut 生产技术和自动化:IPA(联邦德国) Robert Bosch GmbH (联邦德国) 泰恩河纽卡斯尔大学(英国) 国立技术大学(希腊) 新里斯本大学(葡萄牙) 由财团选定的工件处理应用领域理论简单但实际复杂,特别是在小批量的柔性制造系统环境中扮演着重要的角色。采用先进传感器的信息,随机取向的工件可以被机器人系统识别、抓取和重新定位在指定位置。执行这项任务的能力要求高度专业化的子系统的发展及成功集成可用的组件。 机器人系统由一个控制器和三个主要的子系统:视觉、触觉和夹持器(图1)。该系统的操作包括一个训练阶段和一个操作阶段。 在训练阶段,对于每一个对象教给视觉系统的,两个触觉图像对必须教给触觉系统。一个合适的用面向任务的编程语言BAPS(Bosch应用编程系统)编写应用程序的机器人,由两个传感器子系统对坐标对象进行学习。在操作阶段,随机放置在工作区的对象被视觉系统观察,并尝试依次识别每一个。作为一个对象面是确定的,它的位置传送到机器人控制器,使爪抓取对象并且在训练通知预期的触觉系统期间用触觉识别产生图像对。触觉系统并试图确认前视觉系统的检测和计算对象的任何位置偏移,与培训期间的经验相比。该机器人控制器现在可以正确的规划轨迹,允许对象被放置在指定的位置去。特殊问题和可盈利的应用可以在本机器人系统中找到。计算机辅助制造设计一般现代的方法和工具是当前的自动化组件(CAD/CAM)。 项目的第一年,一个重要的工作部分设立相同的测试床,一个在斯图加特(IPA),一个在盖茨黑德(joyce-loebl),这是基于库卡16015的六轴机器人,博世Rho 2控制器,乔伊斯-密度2A的视觉系统,从崇德气动夹具。目前,新一代子系统中已集成到机器人系统等,将在本文的其余部分介绍。这包括增强博世Rho 2(Rho 2e)机器人控制器,维氏PLC MX视觉系统(乔伊斯-科),马里的触觉传感与压力相关的输出系统、由纽卡素大学开发的光学式触觉传感器(基于阴影技术)和由IPA发展的智能手爪系统。一个视图的IPA机器人试验台如图2所示。 本文的目的是提供一个讨论的整体机器人系统的各个部分,以及对截至六月1987工作状态一个简短的描述。此处包含的材料是任务领导者和五联合会提交给欧共体的技术报告提供给作者的。本文先提出的触觉系统,依次是视觉系统、夹具系统,机器人控制系统和CAD / CAM工作。该文件关闭的集成测试床系统的电流性能功能的介绍。 触觉系统 视觉图像处理的触觉图像处理的主要优点:(1)光照没有歧义(2)摄像机观察对象尺寸有关的功能将不受距离(角度)影响,和(3)不需要处理不相关的背景信息,因为相关的数据限制在这些地区与传感器平面接触的对象。主要缺点是限制“视图”的“对象(限于与传感器平面接触的对象区域),使触觉传感器作为一个双重的“窗口”,在任何一方的对象通过特征识别可以发现。另外,在触觉感知,没有发生在视觉清晰的物体的边界,从边界强加的窗口。显然,结合触觉传感与视觉上的相同的系统提供的优点,并最大限度地减少他们的解散优势。 在本项目中,2个触觉阵列传感器构建:一个基于压阻材料(MARI)和基于光转导方法(纽卡斯尔大学)。 MARI触觉传感器系统 该系统由三部分组成:触觉传感器、预处理电子和触觉的处理器。对于阵列中的每个点,该传感器提供了一个可应用于该点的力电可测的输出。预处理单元扫描传感器阵列,阈值分析测井信号,并将产生的数字数据挖掘的触觉处理器。触觉处理器接收数据的预处理技术,将其复制到随机存储器(RAM)的交流过程中,执行功能的前牵引和图像识别,和显示器内夹持物体的滑动。触觉处理器还负责与机器人控制器和手爪控制器必要的沟通,并进行学习和识别任务。配备相应的预处理器,这处理器可用于其他类型的传感器(光学、机电、等)。 传感器的结构如图3所示。它是基于压阻技术,提供了32times;32的元素在1.27毫米距阵。每个传感器由32列(在印刷电路基板铜轨道电路),作为正交32行排列的传感器为基础,使每个传感器单元可以由一行和一列连接评估。每行包括一个灵活的导线顺着内压阻式橡胶管。该行与一个薄的硅橡胶皮,形成的传感器的有源区。它相信这个传感器提供的尺寸和分辨率显著改善其他现有的压阻式压力传感器。PCB基板已被设计为允许安装预处理电路,它允许一个非常紧凑的传感器重新查询一个只有六连接的串行链路建立。完整的传感器用导热灌封胶的铝外壳封装。这提供了支持传感器端口和保护操作。从传感器的串行连接到触觉处理系统通过筹备VME传感器间的面板,它提供了所有必要的信号驱动两个传感器和采集输入传感器信息。信息从传感器形成了VME系统八的二进制图像对,每对对应不同的力范围。目前的硬件配置包括五VME板接口板输出帧存储板、时钟板、32010个DSP(数字信号处理)板,并680LC CPU(中央处理单元)上最后四是可选的。 触觉图像的处理涉及2个部分:分析和识别。分析系统处理的原始传感器数据的低层次的处理,产生一个独特的传感器数据(图像去描述它)。识别来比较两图像描述符,第一个获得的学习阶段和第二从有源传感器在型坯。 分析 模拟传感器数据的第一阈值为水平产生图像的八位二进制(每个对应于一个特定的对应力范围),存储在存储器中的每个传感器。这个从每个传感器的二进制图像经过第一个扩张和收缩操作(“模糊”或“平滑”的图像),然后一个链码算法将确定形状的轮廓。只有那里的点是在方向变化的轮廓进行存储和分析以确定完整的形状和特征(如孔)。外链的部分,近似直线或锐角,然后通过“蠕虫状”处理算法确定。最后,从传感器的结果组合成一个图像描述,准确的论述这三种特征,即形状、线条的原始图像和角(图4)。对其类型的每个特征参数进行存储。如果该系统是在学习模式,图像描述符被存储在RAM中,用于在识别模式下使用。 识别 算法重新接收两个图像描述符:存储在系统参考描述符和一个描述来自电流传感器的图像。图像描述符包含一个与相关联的参数列表中的所有图像特征。基本算法试图与那些活跃的描述符的参考点的匹配(一些规则来避免在这点上可能的组合爆炸)。该参考点参考图像描述符命令协议像形状,角落,或线条的类型。对于引用描述符的每个点,一个列表从活动描述符的合适的点,所有这些都是相同的类型,来自相同的传感器,并具有几乎相同的参数值。Al的算法,然后试图匹配的参考点在其相关表的基准点。一个匹配的发生,两者距离匹配点和先前匹配点之间必须是正确的,和一个角由目前的两以往地匹配点必须是相同的两个描述符(图5)。识别算法积累了运行的总点,成功匹配。一旦累计达到指定的阈值,描述符之间的比赛被认为是成功的,一个校正矩阵计算公式(图5)。校正矩阵是用来通知机器人所学到的触觉系统相比抓地力位置控制器多少的。 触觉软件处理器系统已经被设想为一个智能传感器,能使操作最低限度的操作员干预。目前,五个命令都被现有的机器人编程语言采用,它可以用来将触觉信息转换成搬运任务。所有这些命令如下: init-tactile:使触觉系统重新初始化,保留任何以前学过的图像。trai-tactile:使图像可对传感器进行处理和存储的触觉系统内。iden-tactile:使图像传感器上进行处理并与先前存储的对比较。tactile-stat:原因状态信息的触觉信息系统是跨交给机器人控制器。tactile-iden:原因的iden-tactile比较过程的结果被发送到机器人控制器。 通信采用RS232物理链路采用EIA 1393草案协议的一个子集的实现。触觉系统的实际功能是处理两副图像,从一个物体的两个手柄位置获得,并阻止我的改变物体的位置关系性的传感器。然后将这些信息传递给机器人控制器,以改变它的轨迹并将对象放在指定位置。图6是一张显示的带有测试对象触觉传感器和典型的图像的照片。 另一种触觉传感器 另一种触觉传感器是一种基于光折射技术的光学传感器。它由一个透明的塑料底座,通过拉伸的硅橡胶膜。透明的基础是从侧面照亮,和底面是集中由一个镜面安排成一个小型CCD(电荷耦合器件)阵列。当橡胶膜压,光是从与透明底座接触点通过基地到CCD阵列反射。该传感器具有高分辨率(256times;256)和少量的互连的优点。然而,灰度信息是缺乏的,在解决对象的小功能,有一个困难。该传感器是安装在一个专用夹具制作使用30毫米直径的垫IPA规格(图7)。手指/传感器的外部形状和尺寸的其他手指夹持器的补充,它配有一个物体转动的马达驱动板。该传感垫可以自由旋转,在任一方向上没有限制,可以承受的力量超过25公斤。要产生良好的质量图像,压力通常必须大于800克/厘米。 手指的触觉传感器也安装在手指的身体存在的Seitner抓取的力传感器,与抓力通过触觉传感器传递到力传感器。当工件被爪垫旋转的时候,手指/传感器的安排允许物体上的的触觉力图像和总压力被记录下来。在这种方式中,可以在工件操作时监视工件的方向和滑移,该表比较了目前的光学和压阻式传感器的属性。 视觉系统 视觉传感系统是由乔伊斯开发并已分成三个主要部分组成:识别算法,视觉硬件,和视觉的机器人接口。基于乔伊斯密度2A视觉系统有了一定发展。视觉任务是提供位置,方向和对象的描述信息的机器人,这样的触觉传感,被用来准确地定位和拿起的对象。被识别的对象是复杂的三维组件,可能是倾斜和相互重叠约百分之五十。边缘的定义是非常重要的,因此多灰度级的分析和处理能力是该项目的视觉系统的基本要求。此外,该零件的复杂性质是这样的,内部特征或表面要被用来分类的对象。统计模式识别方法已被采用,使组件识别的灵活性,可以最大化,同时确保系统简单的使用(即,通过演示文稿培训部分)。 抓取系统 触觉抓取模型(G1),第一年由IPA研究的一种闭环位置控制和手动切换手指的电机驱动抓取器。位置控制(与机器人控制器和传感器通信)被基于68000微处理器系统集成在抓取器本身上。 机器人控制 对控制系统的工作分为Rho 2控制器的增强(博世)和一个简单的自适应控制器的开发(博世、纽
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[150160],资料为PDF文档或Word文档,PDF文档可免费转换为Word



