基于Python的船舶操纵仿真建模毕业论文
2020-03-03 10:04:19
摘 要
伴随着经济全球化发展的不断深化,海上贸易船舶数量不断增多,普遍船舶航速提高,海上交通事故的发生频率也逐年呈现上升趋势。根据相关部门的不完全统计结果,平均每年发生海上交通事故的船舶占据世界船队总数的0.4%左右,其中有近一半事故的发生原因在于船舶操纵性。
船舶操纵性与船舶海上航行安全有着极为紧密的联系,是评价船舶航海性能的一项重要指标,国际上关于船舶操纵性能的研究工作一直受到各海事权威机构的关注。
本文就提高船舶操纵性能开展相关研究性工作。首先通过参阅相关文献获取实船各项静态特性参数及指标,然后建立船舶动态运动动力学模型、确立运动参考系、分析船舶各部分受力,并最终编制程序在仿真软件上获取船舶模型运行轨迹及相关运动信息。通过旋回圈与Z形试验确保船舶具有优良的操纵性能。
关键词:船舶操纵性;船舶海上航行安全;软件仿真
Abstract
With the rapid development of economic globalization, the number of ships at sea has increased, the speed of general ships has increased, and the frequency of maritime traffic accidents has also been on the increase year by year. According to the incomplete statistical results of the relevant departments, the average number of ships that have experienced marine traffic accidents each year accounts for about 0.4% of the total number of fleets in the world. Nearly half of these accidents are due to ship maneuverability.
The ship's maneuverability is closely linked with the safety of marine navigation. It is an important indicator for evaluating the marine navigation performance. In recent years, it has been widely concerned by the International Maritime Organization (IMO) and scholars from various countries.
This article carries out relevant research work on improving the maneuverability of ships. Firstly, by referring to the relevant literature, the static performance parameters and indicators of the real ship are obtained, then the dynamic dynamic model of the ship is established, the motion reference system is established, the force of each part of the ship is analyzed, and finally the program is compiled to obtain the operational track of the ship model on the simulation software. And related sports information. Through the spiral loop and Z-shaped test to ensure that the ship has excellent handling performance.
Keywords: ship maneuverability; marine safety;Simulation
目录
摘要 I
Abstract II
第1章 绪论 1
1.1 选题背景和研究意义 1
1.2 研究进展及现状 2
1.2.1 船舶操纵性模型研究历史 2
1.2.2 船舶操纵性评价标准研究历史 4
1.3本文主要工作 4
第2章 船舶操纵运动数学模型 6
2.1 前言 6
2.2 MMG数学模型发展历程 6
2.3 MMG数学模型简介 6
2.3.1 坐标系 6
2.3.2 运动方程 7
2.3.3 船舶水动力 7
2.3.4 螺旋桨推力和扭矩 7
2.3.5 舵力及力矩 8
第3章 船舶操纵运动仿真 9
3.1 Python简介 9
3.1.1 Python对比Matlab 9
3.2 模型参数设置 10
3.2.1 船舶模型:KVLCC2 12
3.3 Python程序编制 13
3.3.1 船舶旋回圈 13
3.3.2 船舶Z形试验 13
第4章 15
第4章 船舶操纵性仿真研究的分析与应用 16
4.1船舶操纵性仿真研究分析 16
4.1.1可行性分析 16
4.1.2经济性分析 16
4.2 船舶操纵性仿真研究的应用 16
第5章 总结与展望 18
5.1 全文总结 18
5.2 研究展望 18
参考文献 19
附录 20
(1) 旋回圈Python程序 20
(2) Z形试验Python程序 24
致谢 29
- 绪论
- 选题背景和研究意义
纵观船舶航行发展史,海上船舶航行安全性问题一直以来都作为海事领域的重点关注对象,也是该领域的重点研究对象之一。经济全球化浪潮之下,世界商品贸易往来日益密切,有关航海安全性的船舶操纵性方面研究工作亟需得到重视。根据联合国每年编撰和出版的《海事评述》年度报告 记录:世界海上船舶航运贸易总量保持着相对稳定的增长趋势,每年的平均增长率都在3.1%左右。同时,该报告还指出每年经海上船舶运输贸易的世界商品总量约占世界商品贸易总量的80%海运贸易的商品总价值占世界商品贸易总价值的70%以上。由上述资料可知,海上交通贸易毫无疑问是国际贸易的主要形式也是实现经济全球化的中流砥柱,在国际商品运输方面扮演着至关重要的作用,船舶航行安全问题不容小觑。
记录:世界海上船舶航运贸易总量保持着相对稳定的增长趋势,每年的平均增长率都在3.1%左右。同时,该报告还指出每年经海上船舶运输贸易的世界商品总量约占世界商品贸易总量的80%海运贸易的商品总价值占世界商品贸易总价值的70%以上。由上述资料可知,海上交通贸易毫无疑问是国际贸易的主要形式也是实现经济全球化的中流砥柱,在国际商品运输方面扮演着至关重要的作用,船舶航行安全问题不容小觑。
然而在世界海运贸易运输量不断扩增的趋势之下,随着国际贸易进程持续加快全球范围内的海上交通事故也不断发生,给各国政府和人民带了巨大的资源浪费与生命安全损失。根据安联全球企业和特殊风险投资公司对由Lloyd搜集的统计数据发布的《航运安全评估报告》 的详细分析:16年全球共发生2700多起船舶海上交通事故,而与船舶操纵性能相关的交通事故类型如碰撞事故和搁浅事故发生总量超过700起,约占所有海上交通事故的26%。通过笔者收集的近十年来的全球范围内发生海上交通事故总额及相关详细资料来看,搁浅事故与碰撞事故是海上交通事故的罪魁祸首占据了事故总量的百分之三十以上,而在船舶全损的事故中因船舶操纵性差导致的事故占比为28%左右,远远超乎笔者预期由此可见提高船舶操纵性能的相关研究工作亟需提上日程。
的详细分析:16年全球共发生2700多起船舶海上交通事故,而与船舶操纵性能相关的交通事故类型如碰撞事故和搁浅事故发生总量超过700起,约占所有海上交通事故的26%。通过笔者收集的近十年来的全球范围内发生海上交通事故总额及相关详细资料来看,搁浅事故与碰撞事故是海上交通事故的罪魁祸首占据了事故总量的百分之三十以上,而在船舶全损的事故中因船舶操纵性差导致的事故占比为28%左右,远远超乎笔者预期由此可见提高船舶操纵性能的相关研究工作亟需提上日程。
不断发生的海上交通事故不仅给国家和人民生命财产安全带来了巨大损失同时一部分船舶泄漏原油及化学品等物质还导致了大面积海洋环境污染,造成无法估量的人类社会问题和环境安全问题例如:1989年3月“EXXON VALDEZ”油轮触礁事故,巨量原油流入海洋造成严重的环境污染,同时因事故地点偏远,救援人员只能通过直升机与小船通达至事故现场,后果是这场海上事故仅清理费用就高达25亿美元。1996年,油船“SEA EMPRESS”在英国米尔福德港不幸触礁,6500吨原油流向大海,给海洋环境及生物资源造成严重的污染与破坏。而回首国内,仅1999年就发生多起重大、特大水上交通事故,给国家带来的直接经济损失高达2.5亿元。最值得一提的是:1999年年底来自山东轮渡公司的“大舜”号滚装船因巨大风力导致船体丧失动力在牟平姜格庄附近海域搁浅,276名旅客船员在该事故中失踪与丧生,震惊媒体!
正是由于以上等原因,国际海事组织(IMO)协同各国政府为保障海上船舶航行安全及海洋生态环境安全一齐制定了规范船舶操纵性相关标准的法案:国际海事组织(IMO)顾及海上贸易中船舶的航行安全,提出两项要求以确保船舶具有良好的操纵性能:(1)建造新船时,设计者在设计初期就必须制定一个关于船舶操纵性能的暂行标准用以确保所设计、建造的船舶具有良好的操纵性能(2)船舶建造完成后,船舶操纵人员必须拥有有关船舶操纵性能的操纵手册以确保操纵者充分了解本船的操纵性能,避免因操纵者自身操纵不当而造成不必要的海上交通事故。1971年,国际海事组织(IMO)还建议在船舶驾驶台应显示有关船舶操纵性的各项数据,以便操纵者能够随时了解所操纵船舶的实时状况并对可以预知的风险问题做出及时有效的调整。1993年,IMO A751(18)决议通过了“船舶操纵性暂行标准”(Interim standard for ship maneuverability),明确地规定了四项船舶操纵性能的评价指标:(1)船舶回转能力;(2)初始船舶回转能力;(3)船舶偏航纠正和航向稳定能力:(4)船舶停船能力。而回首中国国内,当时正处于改革开放飞速发展的黄金时期,于是中国船检部门也紧跟时代步伐于1997年制定了有关船舶操纵性能的指导性文件对国内各个造船厂所建造的新船的操纵性能提出了更为严苛的要求,以保障在进出口贸易时海上运输中的船舶航行安全。
目前有关船舶操纵性的研究热潮正在国际社会 上兴起,吸引着国际海事权威机构及各国政府的目光,许多国际学者也将与船舶操纵性相关的课题作为主要研究领域之一,开展各类研究工作并卓有成就。而我国作为世界第三造船大国更应该重视船舶操纵性方面的问题并以积极的态度开展船舶操纵方面的理论、实验研究,以争取我国在船舶操纵研究领域中应有的地位,同时保障我国在改革开放之路上的稳步发展。本课题通过Python仿真软件建立三自由度船舶模型采用MMG分离式船舶数学模型,通过模型仿真最终获得船舶操纵的旋回圈、Z型实验轨迹及相应的船舶信息等。
1.2 研究进展及现状
1.2.1 船舶操纵性模型研究历史
大多数情况下,船舶操纵性能是指船舶通过其控制系统来保持或者改变船舶航行速度、航向和航行姿态的性能,作为船舶航行安全性的一项重要指标其须保证船舶能够快速响应操纵者发出的各项机动指标同时作出相应反应动作例如:提高(或降低)航行速度,改变(或保持)航行方向;当遇到特殊航行路段,能够灵活的改变航行姿态规避到来往船只或者礁石以防止碰撞和搁浅之类的事故发生,保障船舶与操纵人员的安全。
作者通过观察实际条件下船舶海上航行的操纵运动过程,归纳总结得出:船舶是经由一系列内置的操纵设备来保证适当的航速与正确的航向,当船舶行驶状况与预期存在偏差时操纵者通过船舶控制系统向舵机发出控制指令,随后舵机驱动转向装置转动角度使得舵或者螺旋桨产生水动力帮助船体偏移到正确的航向上且速度提高(或降低)到适当值。整个过程均在自动化设备的辅助作用下完成,并在动作完成后系统会给控制台回馈电信号,以显示船舶的实时机动过程保证船体按操纵者预期完成调整。
综上所述,船舶实际的操纵运动过程形成了如图1.1所示的闭合控制回路:
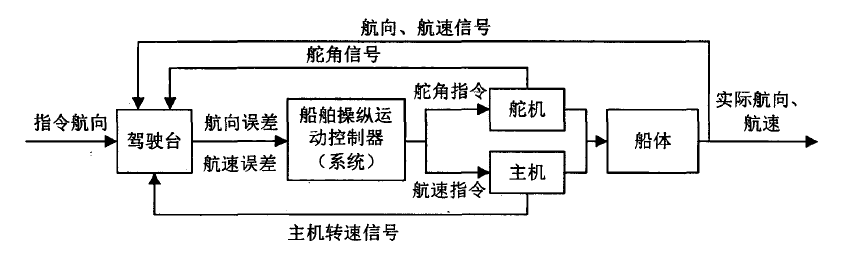
图1.1
国际社会普遍认为,有关船舶操纵性的研究工作始于1946年,当时Davidson 和 Schiff 一起发表了论文《船舶稳定性和航向回转性》 该论文率先提出了较为准确的船舶操纵性概念以及船舶操纵运动方程式的正确结构,以及船舶稳定性和航向回转性指数的表征具有里程碑式的意义,同时标志着船舶操纵性理论的初步形成。此后到了1949年,巴辛发表了论著《船舶稳定性和航向回转性》在船舶操纵性研究方面做出杰出贡献。值得一提的是巴辛早在1939年就开展相关科研工作并利用Lyapunov的运动稳定理论研究了船舶航向稳定性问题。然后到了1944年Kempf发表学术论文探讨并提出了Z形试验方法,开创了船舶操纵性的动态响应研究的先河
该论文率先提出了较为准确的船舶操纵性概念以及船舶操纵运动方程式的正确结构,以及船舶稳定性和航向回转性指数的表征具有里程碑式的意义,同时标志着船舶操纵性理论的初步形成。此后到了1949年,巴辛发表了论著《船舶稳定性和航向回转性》在船舶操纵性研究方面做出杰出贡献。值得一提的是巴辛早在1939年就开展相关科研工作并利用Lyapunov的运动稳定理论研究了船舶航向稳定性问题。然后到了1944年Kempf发表学术论文探讨并提出了Z形试验方法,开创了船舶操纵性的动态响应研究的先河 ,为船舶操纵性研究领域确立了新的评价标准启发了后续诸多学者的相关研究性工作。
,为船舶操纵性研究领域确立了新的评价标准启发了后续诸多学者的相关研究性工作。
正是由于前人们充满创造力的研究工作,船舶操纵性领域的理论基础得以诞生,且极大地推动了船舶操纵性研究工作的发展与深入,同时也为后续学者提供了正确的研究思路与数学方法。此后的几十年里,国内学者刻苦钻研、奋力探索并在有关船舶操纵性方面的研究上取得了诸多突破性进展与较为丰硕的研究成果例如:1964年Abkowitz发表论文推导出六自由度船舶运动方程 ,该论文为船舶非线性运动研究提供了有力的数学工具;1970年瑞典学者Norrbin提出整体化的建模方法
,该论文为船舶非线性运动研究提供了有力的数学工具;1970年瑞典学者Norrbin提出整体化的建模方法 ,其数学推导过程较为完整严谨,得到的船舶操纵运动方程具有较高精度,但缺点在于试验耗费较高,试验条件要求严格,不具备完全的实用性。
,其数学推导过程较为完整严谨,得到的船舶操纵运动方程具有较高精度,但缺点在于试验耗费较高,试验条件要求严格,不具备完全的实用性。
二十世纪七十年代,日本科学家于提出了分离型船舶运动数学模型(Maneuvering Model Group Model,MMG) 此模型在国际社会上被广泛接受,经过不断地优化改良,2013年日本船舶海洋工学会发布了标准MMG模型方法
此模型在国际社会上被广泛接受,经过不断地优化改良,2013年日本船舶海洋工学会发布了标准MMG模型方法 。
。
然而在船舶的海上实际航行中,难免会受到风、浪和不定常水流等外界的干扰,船舶自身装载量也会构成影响造成船舶操纵运动方程的应用存在偏差于是近年来,随着实验技术的进步与船舶动力学科的发展,国内外学者在先前模型的基础上进行了优化与改进,建立了诸如:风浪中船舶操纵运动模型、限制水域船舶操纵运动模型等方面研究,并取得了具有重要意义的研究成果。
1.2.2 船舶操纵性评价标准研究历史
船舶操纵性能是船舶重要的航行指标之一,但是在上个世纪80年代之前,船舶在设计与建造期间常常会忽视掉船舶操纵性能导致船舶设计时各项参数指标选用不当制造出操纵性能欠佳的船舶,其后果便是许多严重的海滩事故与海洋污染事故的发生。
因此,为了确保船舶海航安全1982年国际海事组织(International Maritime Organization,IMO)正式开展船舶操纵性评价与标准化的工作并在成员国的参与协助下开始起草评估船舶操纵性的指南。
1985年,海事安全委员会船舶设计和装备委员会批准了“船舶设计阶段操纵性能评估暂行指南”(Interim Guidelines for Estimating Manoeuvring Performance in Ship Design),MSC / Circ.389号通函。为了评估船舶设计阶段的操纵性性,船舶操纵性的特征值被定量表示,并给出了评估这些特征值的具体方法。国际海事组织(IMO)历经八年的试用期,根据收集的“船舶操纵性暂行标准”的适用反馈和各成员国提出的针对性修改意见完成了“船舶操纵性暂行标准”。 2002年海事安全委员会通过MSC.137(76)号决议,正式宣告颁布了“船舶操纵性标准”(Ship maneuverability standards)
但值得一提的是,IMO颁布的《船舶操纵性标准》从实质上来说仅仅只是国际社会所能接受的船舶操纵性的最低标准,所以船舶操纵性相关领域的专家和学者并没有停下探索研究的脚步,继续就船舶操纵性方面展开研究。上个世纪80年代,Barr等人依据大量试验数据建立了一个评价船舶操性标准的分级系统 ,该系统建立出了船舶操纵性在可接受范围内的最小指标。随后在2006年Belenky 和 Falzarano提出了一个以IMO标准为最低标准
,该系统建立出了船舶操纵性在可接受范围内的最小指标。随后在2006年Belenky 和 Falzarano提出了一个以IMO标准为最低标准 ,并在其基础上给出了一个优化的操纵性评价标准(该标准将操纵性标准分为5等,IMO颁布的《船舶操纵性标准》为1等即最低标准),随后不久美国船级社(American Bureau of Shipping,ABS)认可了此项标准,并在后续的准则颁布中引用了该分级系统。
,并在其基础上给出了一个优化的操纵性评价标准(该标准将操纵性标准分为5等,IMO颁布的《船舶操纵性标准》为1等即最低标准),随后不久美国船级社(American Bureau of Shipping,ABS)认可了此项标准,并在后续的准则颁布中引用了该分级系统。
1.3本文主要工作
本文选择模型船进行动力学建模,并简化模型。查阅相关文献获取船舶标准数据指标,运用python仿真软件进行操纵性试验仿真。主要工作如下:
- 采用日本学者提出的MMG分离式运动数学模型,并在此基础上建立船舶操纵运动数学方程式。
- 编制python计算程序,对船舶模型进行操纵性试验。
- 进行仿真模型试验,最终达到能获取船舶操纵旋回圈、Z形试验运动轨迹及相应船舶运动信息。
- 船舶操纵运动数学模型
2.1 前言
在船舶设计与建造的初期,就必须考虑船舶的操纵性能再选择主要参数,这一阶段对船舶操纵性设计工作具有重要意义,保障船舶海上航行安全,避免许多与船舶操纵性相关的交通事故的发生。本文基于日本学者提出的MMG分离式船舶运动数学模型对船舶操纵性能进行预测研究。
2.2 MMG数学模型发展历程
船舶操纵性研究的高潮出现上世纪60年代,伴随着许多大型油轮的出现,为了揭示此类油轮复杂的操纵特性以及用于开发高性能的船舶操纵运动模拟器,精准优化且具有广泛适用性的船舶运动数学模型亟需建立。于是在上世纪70年代,日本拖曳船池委员会(JTTC)成立了船舶操纵运动数学模型研究组(Ship Maneuvering Mathematical Model Group),号召并集聚了一大批船舶动力研究领域的专家学者就船舶操纵性方面展开研究工作,在学者们刻苦钻研与奋力探索之下,历经数十年终于提出了MMG分离式船舶运动数学模型,该模型在后续的时光中,被各个学者不断地进行修正与优化沿用至今,已被视作权威。
MMG分离式船舶运动数学模型在国际社会上受到广泛认可,许多学者基于此模型进行研究,并对模型进行改进和优化,不断完善至今。



