喂饭机器人结构方案设计与验证毕业论文
2020-02-13 22:02:24
摘 要
随着科技的发展,从日常生活到工业生产中,出现和应用各种机器人,都是源于人们对自动化、智能化的大量需求。为了提高工厂的运营效率,人们发明了一系列工业机器人如堆垛、焊接机器人;为了减少家务负担,人们发明了许多服务机器人,如扫地和擦窗机器人。人类对放心,方便,舒适和健康的追求,推动了机器人的快速发展和大面积应用。而当今社会人力资源并不足够照顾数量众多生活自理能力有限的人群,因此设计一款价格合适,实用性较强的喂饭机器人符合一定的市场需求。本文主要研究内容如下:
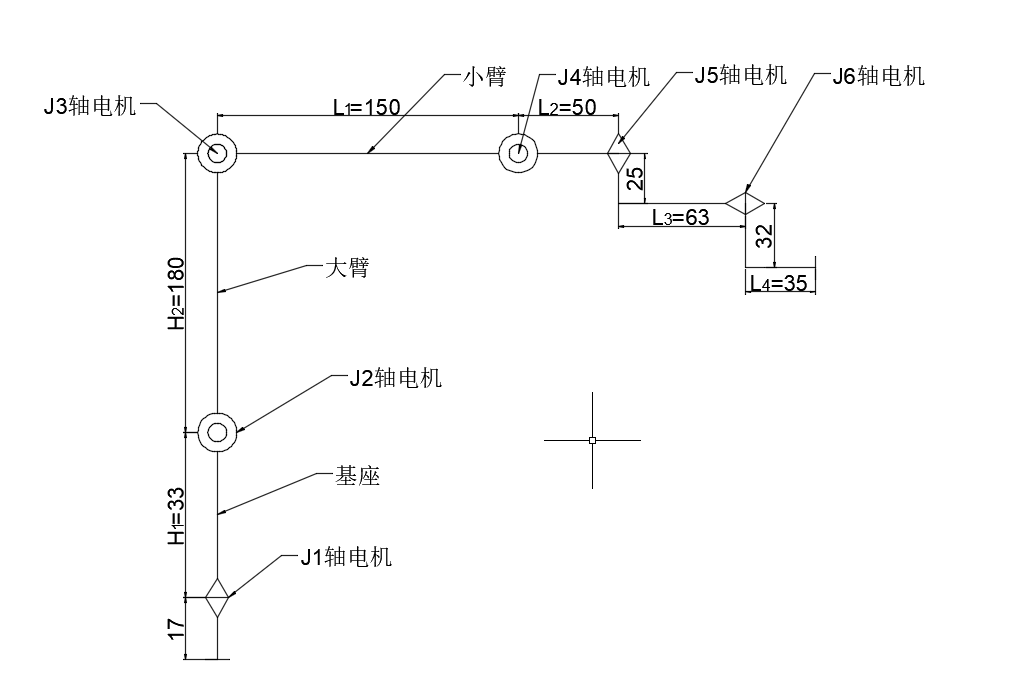
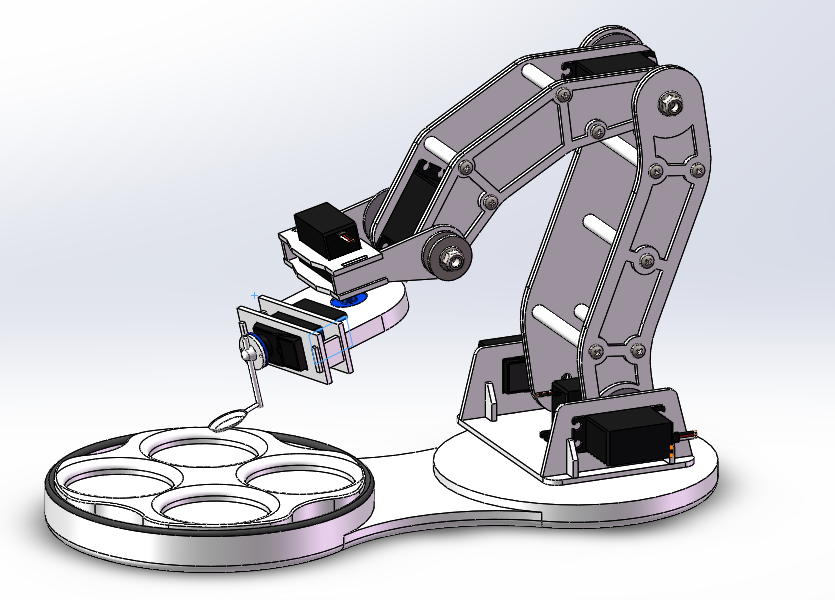
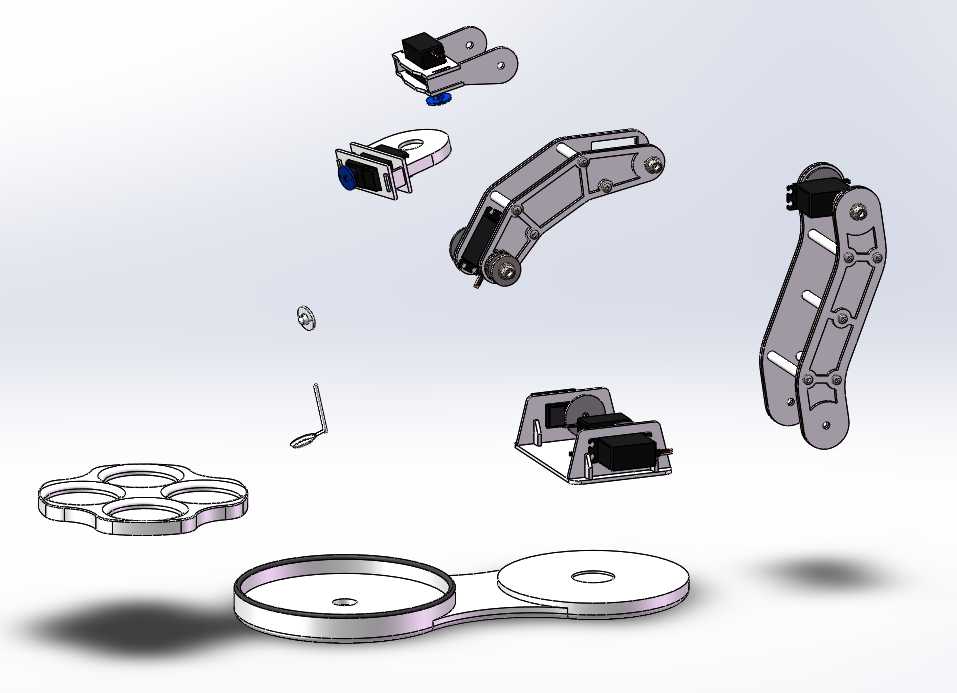
首先,对喂饭机器人进行结构设计。对喂饭机器人功能和使用场景进行分析,结合机械臂自由度分析,决定使用六自由度设计喂饭机械臂。并通过将机械臂与可旋转餐盘相结合的方式作为完整的喂饭机器人结构。通过SolidWorks对机器人主要零部件进行建模,并通过机械臂结构简图对机械臂的特殊工作情况进行分析,选择出最合适的舵机型号。最终利用SolidWorks将各零件进行整机装配。为本面进行机构运动学分析以及加工组装实物模型打好基础。
然后,对喂饭机器人进行运动学分析及运动学仿真。利用D-H方法建立喂饭机器人机臂连杆坐标系,通过坐标系找出相应D-H参数,利用各关节参数建立正运动学方程,并对方程进行求解。同时描述机械臂逆运动学求解方法。最后根据MATLAB中Robotics Toolbox工具箱建立机械臂相应数学模型,并进行正逆运动学仿真验证。
最后,探究喂饭机器人实际投入生产时的材料以及加工方式,并以演示结构合理性为主要目的选择实物模型相应材料及加工方式,并将各机器人零部件加工出来,并利用多种连接方式对加工完成的各种零件进行组装,最终完成喂饭机器人实物演示模型的制作。
关键词:喂饭机器人;结构设计;机械臂;运动学分析;运动学仿真
Abstract
With the development of the times, from industrial production to daily life, the emergence and use of various robots are all due to people#39;s strong demand for automation and intelligence. In order to improve the efficiency of factory operation, people invented a series of industrial robots, such as handling, palletizing and so on. In order to reduce the burden of housework, people invented a large number of service robots, such as sweeping the floor and cleaning windows. It is people#39;s pursuit of ease, convenience, comfort and health that promotes the rapid development and wide application of robots. However, human resources in today#39;s society are not enough to take care of a large number of people with limited self-care ability, so the design of a feeding robot with moderate price and strong practicability meets the market demand.
Firstly, the structure of the feeding robot is designed. Based on the analysis of the function and usage scene of the feeding robot and the analysis of the degree of freedom of the manipulator, a six-degree-of-freedom feeding manipulator is designed. By combining the manipulator with the revolving plate, the structure of the feeding robot is completed. The main parts of the robot are modeled by SolidWorks, and the special working conditions of the manipulator are analyzed by the structure sketch of the manipulator. The most suitable type of steering gear is selected. Finally, the parts are assembled by SolidWorks. It lays a good foundation for kinematics analysis of mechanism and physical model of processing and assembling.
Then, kinematics analysis and kinematics simulation of the feeding robot are carried out. The D-H method is used to establish the linkage coordinate system of the feeding robot arm. The corresponding D-H parameters are found through the coordinate system. The forward kinematics equation is established by using the joint parameters, and the equation is solved. At the same time, the inverse kinematics solution method of the manipulator is described. Finally, according to the Robotics Toolbox toolbox in MATLAB, the corresponding mathematical model of the manipulator is established, and the forward and inverse kinematics simulation is carried out.
Finally, the material and processing method of the feeding robot when it is put into production are explored, and the material and processing method of the physical model are selected for the main purpose of demonstrating the rationality of the structure, and the parts of each robot are processed, and the various parts processed are assembled by various connection modes. Finally, the production of the physical demonstration model of the feeding robot is completed.
Keyweords Feeding Robot; Structural Design; Manipulator; Kinematics Analysis; Kinematics Simulation
目录
第1章 绪论 1
1.1 课题背景及研究意义 1
1.2 研究现状 2
1.2.1 喂饭机器人研究现状 2
1.2.2 小型机械臂研究现状 2
1.3 论文研究内容及技术路线 3
1.3.1 论文研究主要内容 3
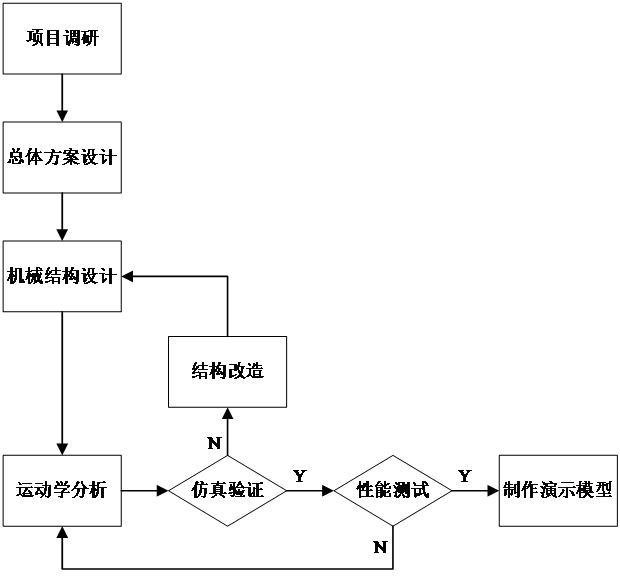
1.3.2 研究技术路线 4
第2章 喂饭机器人结构设计 5
2.1 总体方案设计 5
2.1.1 喂饭机器人功能分析 5
2.1.2 喂饭机器人设计要求 5
2.2 喂饭机械臂设计 6
2.2.1 机械臂类型及自由度选择 6
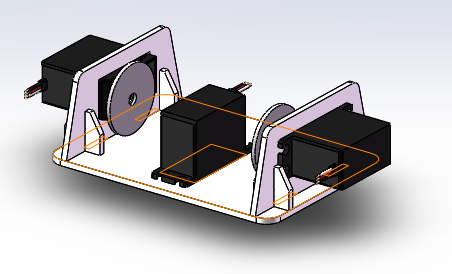
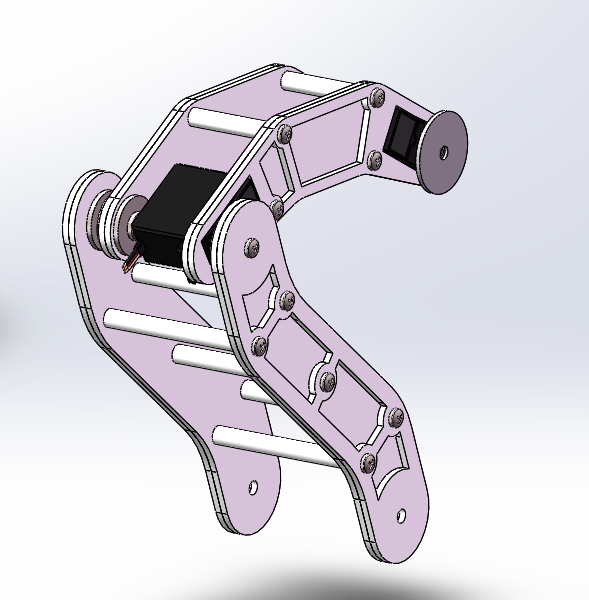
2.2.2 机械臂基座结构设计 7
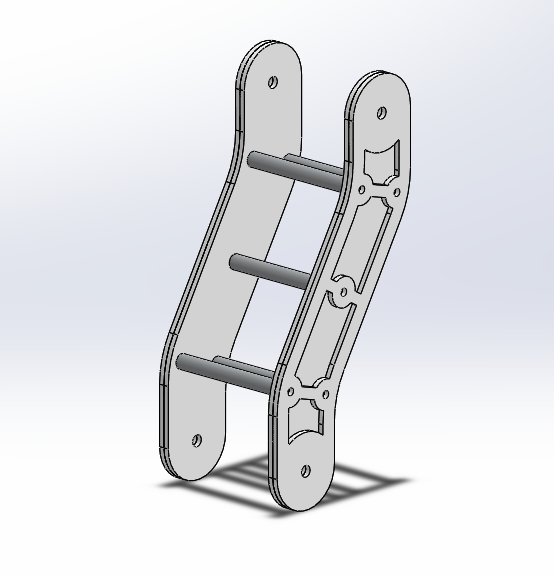
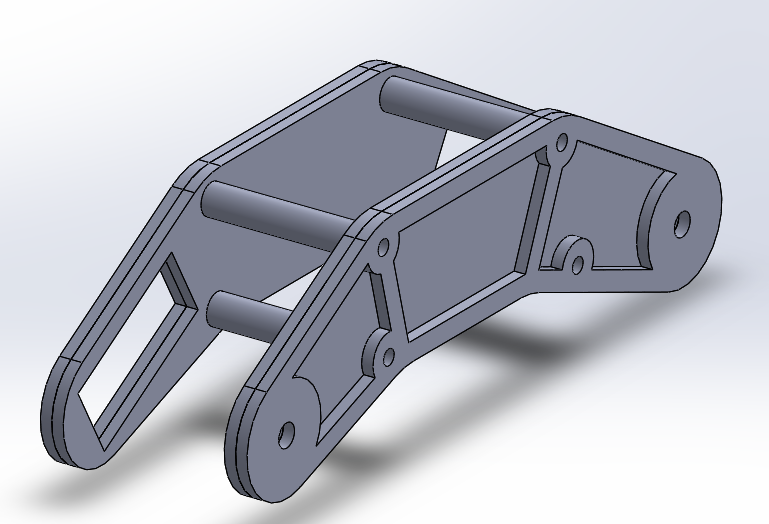
2.2.3 机械臂手臂结构设计 8
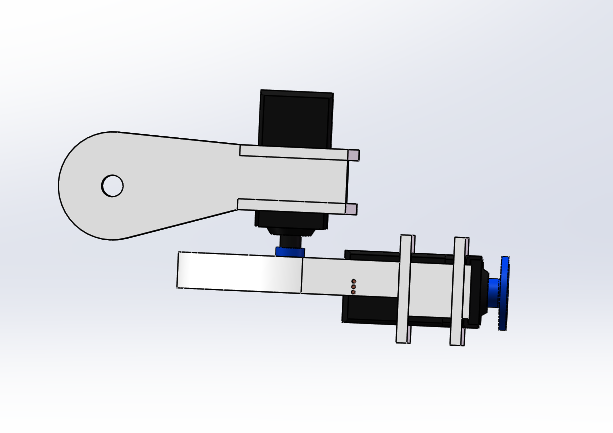
2.2.4 机械臂手腕结构设计 10
2.3 其他部件结构设计 10
2.3.1 末端执行器结构设计 10
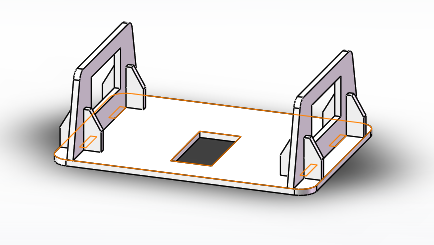
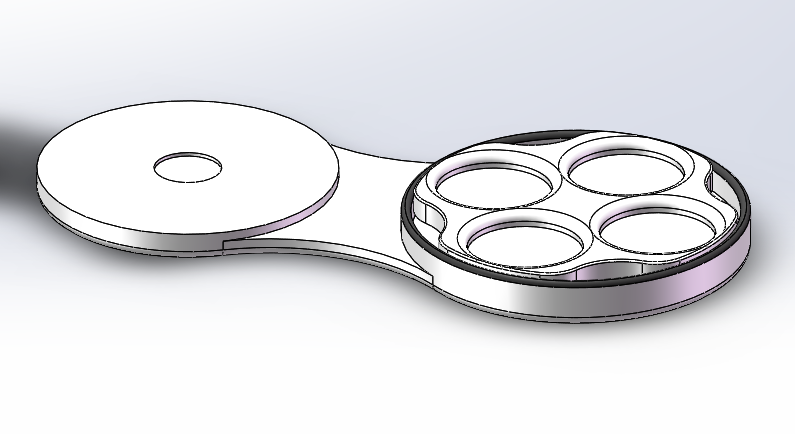
2.3.2 餐盘及底座结构设计 11
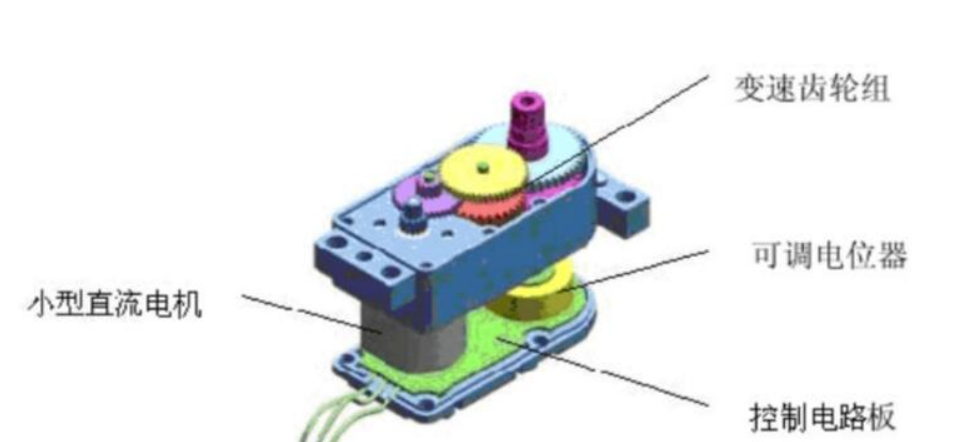
2.4 舵机选型 12
2.5 整体装配 13
2.6 本章小结 14
第3章 机械臂运动学分析 15
3.1机械臂运动学基础 15
3.1.1 机械臂位姿描述 15
3.1.2 坐标变换 16
3.1.3 齐次坐标变换 18
3.2 机械臂坐标系建立 19
3.2.1 连杆描述及连杆参数 19
3.2.2 连杆坐标系建立 19
3.2.3 连杆变换 20
3.3 喂饭机械臂运动学分析 21
3.3.1 建立连杆坐标系及确定连杆参数 21
3.3.2 机械臂正运动学求解 22
3.3.3 机械臂逆运动学求解 24
3.4 机械臂运动学仿真 25
3.4.1 喂饭机械臂建模 25
3.4.2 正逆运动学仿真 27
3.5 本章小结 28
第4章 实体模型加工组装 29
4.1 加工方式及材料选择 29
4.1.1 批量生产加工方式和材料选择 29
4.1.2 实体模型加工方式及材料选择 29
4.3 完整模型组装 31
4.4 本章小结 31
第5章 总结与展望 32
5.1 论文工作总结 32
5.2 未来展望 32
参考文献 34
致谢 35
第1章 绪论
1.1 课题背景及研究意义
随着社会不断发展, 人们对自动化、智能化的需求越发强劲。因此从日常生活到工业生产中,都出现和应用了各种各样的机器人。为了提高工厂的运营效率,人们发明了一系列工业机器人如堆垛、焊接机器人;为了减少家务负担,人们发明了许多服务机器人,如扫地和擦窗机器人。人类对放心,方便,舒适和健康的追求,推动了机器人的快速发展和大面积应用,因此从市场需求来看,喂饭机器人的主要受众有以下两类人群。
首先是残疾人士。目前世界上残疾人及住院患者数量是非常高的,而医院的基础设施和医疗资源有限。在残疾人医疗服务无法跟上病患增长趋势的情况下,将日常的喂饭工作交付给机器人自动进行是一个不错的办法。因此,出于对残疾人士的日常喂饭的生理需求,各种残疾人士及住院患者将是主要受众之一。
其次是老人和儿童。随着社会不断发展,如今人口老龄化问题逐渐加剧,而二胎政协也使儿童出生率也有了明显提升,老年和小孩人口数量的增长,不仅加重了养老育儿的生活负担,也对工作较繁忙的人群有更高要求。在这种情景之下,为解决社会上逐渐严重的养老育儿问题,喂饭机器人的出现将对老人和小孩有更重要作用。
有了受众就有了需求,而需求决定市场,市场则可以决定商用的可能性和价值。对于喂饭机器人来说,老人、儿童和残疾人士是主要面向人群。而医疗场所、养老院、甚至是普通家庭都将是喂饭机器人的重要使用场合。但要获得大规模生产研发和市场化发展,单靠这些还不够,还需将成本和技术两方面的问题解决。
从成本上讲,喂饭机器人的成本本不因超过人工酬劳,但纵观国外MY SPOON、Obi等喂饭机器人的售价来看,都是严重超过了人工成本,售价极其高昂。过于高昂的使用成本导致现在市场上喂饭机器人的普及程度极其之低,价值体现也不尽人意。同时在技术方面,喂饭机器人不应该只是替代人工喂饭的工具,更是一种伴随孤寡老人小孩、减少孤独、帮助人们进行情感交流的工具。因此,喂饭机器人不仅要有最基础的喂饭功能,还应该具有人性化设计,最好可以进行智能交互,甚至是情感沟通的能力。
总而言之,喂饭机器人不仅可以解决解决功能问题,还可以解决情感、社交、陪伴等方面的需要,未来的商业空间和市场十分巨大,只要能解决成本和技术两方面的问题,喂饭机器人前景可期。
1.2 研究现状
1.2.1 喂饭机器人研究现状
世界上最早研发出喂饭机器人的国家是日本。在2002年5月,日本的西科姆公司推出的MY SPOON喂饭机器人是世界上第一一款喂饭机器人,投入市场后引发了一阵市场潮流。
在2015年的'自治体综合展览会'上,MY SPOON参加展览并可以实际体验。据了解,该款机器人设计上充分考虑人性化,使用者需要通过操纵器进行操作,末端夹具上的勺子就会自动在食物盘中盛起食物,然后自动送到人的嘴边完成自动喂食工作。处于该机器人人性化设计,MY SPOON在当年的同台竞技中,击败了参加比赛的各种服务机器人,获得了一等奖。
在2016年,美国一家叫做Desin的公司,也研发出了一款叫喂Obi的喂饭机器人。该款机器人同MY SPOO一样,是由一个餐盘加一个可以自由移动的机械臂组合而成,但与MY SPOON不同,它由两个颜色不同的按钮进行控制,一个按钮是选择餐盘,而另一个按钮是控制机械臂自动运行。Obi还具有记忆初始外置的功能,它能设置机械臂第一次喂饭姿态,提高了喂饭时工作稳定性。
澳大利亚在2018年也同样推出了一种喂饭服务机器人。然而该机器人和其他厂商不同,只有一个机械手臂,使用时机械臂固定在使用者腰上,机械臂只能上下移动而不会直接把饭喂到嘴里,使用者进食是需要移动头部。
由此可见,目前有很多国家和企业都在尽力于喂饭机器人的研发及市场推广,各种产品及相关技术得到了快速发展,随着人工智能护理产品的种类不断增加,人们在面对产品的时候也将有更多选择。
1.2.2 小型机械臂研究现状
在过去的几十年里是通用机械臂机器人发展的黄金时期,但目前,大多数生产的机械臂都是是通用机械臂。随着社会需求的增加和快速发展,智能机械臂发展迅速。智能机械臂的涉及行业广泛,它不仅包括机械和自动化等基本领域,而且还包括电气技术以及计算机技术。现如今国内外都在重点研究此领域,以提高国家科技综合实力。[1]
美国很早就开始研究发展机械臂技术,十九世纪六十年代,美国政府就没能看到技术的巨大潜力,并且企业也难以接受。因为它在发展初期,在实际应用方面出现了许多问题,并且当时它的费用非常高昂。此后,由于许多汽车企业需要大幅提高汽车生产产量,开始研制一些功能和结构是相对简单的机械臂。这在很大程度上促进了机器人技术的发展。20世纪信息技术突飞猛进后,机械臂向智能化发展,其功能和性能也逐渐完善。
在日本,机械臂机器人技术始于上世纪六十年代,自那时以来迅速发展。1970年,日本便已不再需要从国外进口机械臂,再此以后,日本开始研究如何将机械臂技术应用于工业生产。随着机械臂技术的迅速发展,日本劳动力不足对其工业的影响已经减小。因此,机械臂技术的迅速发展对日本经济具有重要意义。由于机械臂机器人日本企业在生产中被大量使用,日本各种轻重工业产品产量答复增长,同时生产中人工成本大幅度降低。最终日本很多企业的竞争力变强,最占据了大量国际市场。
中国的机械臂技术虽然暂时落后于美国和日本,但我国一直在努力发展自己相关领域,逐步缩短和弥补与他们之间的差距。科学技术的发展,使我国进入了机械臂技术研发阶段的新阶段。国家对机械臂机器人相关领域重视程度越发提高,许多科研机构和高校也对相关技术投入越来越多,研制出许多先进的机械臂机器人。
自中国上世纪九十年代开始经济改革以来,经济发展方式已经开始发生变化,我国也了机械臂发展的新浪潮,机械臂机器人已被开发用于各种用途,并且在工业生产中广泛使用,越来越多的人的工作可以被机器人取代。[2]
虽然现代机械臂的可靠性、精度等功能性逐渐提高,但机械臂技术的发展仍取决于工业发展进度,机械臂依旧具有较高价格。然而,世界范围内的大规模生产机械臂,使机械臂机器人研发生产形成了相对独立的产业。各国科学家和研究人员多次召开国际会议,商议机械零件相关标准,使相同零件可以兼容不同的机械臂,以此降低了机械臂的生产成本。
如今的机械臂正向智能化向前发展,即通过传感器对外界环境做出检测,并根据检测结果使机械臂做出相关反应。比如通过检测目标点操控机械臂末端执行器点对点移动。机械臂和基于视觉识别是现在研究的热方向,使机械臂产生了许多新功能和新使用领域。机械臂上一般装有摄像头等视觉传感器,将影像信息传输到计算机,通过计算机相关处理程序对信息进行处理,将控制信号传递回机械臂,使机械臂机器人完成相关动作。[3]
1.3 论文研究内容及技术路线
1.3.1 论文研究主要内容
(1)本文首先分析喂饭机器人市场需求以及国际上喂饭机器人研究现状以及存在问题。分析然后分析喂饭机器人核心功能部分即小型机械臂的国内外研究现状。
(2)提出喂饭机器人实现方案并利用建模软件SolidWorks对机器人进行三维实体建模。并进行初步能动性检验。
(3)对喂饭机器人机械臂部分进行运动学分析,研究机械臂空间位姿,建立连杆坐标系,并运用D-H参数法进行机械臂正、逆运动学求解。
(4)利用所建模型进行零件加工,并通过模型部分修改完成实物模型的加工组装。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
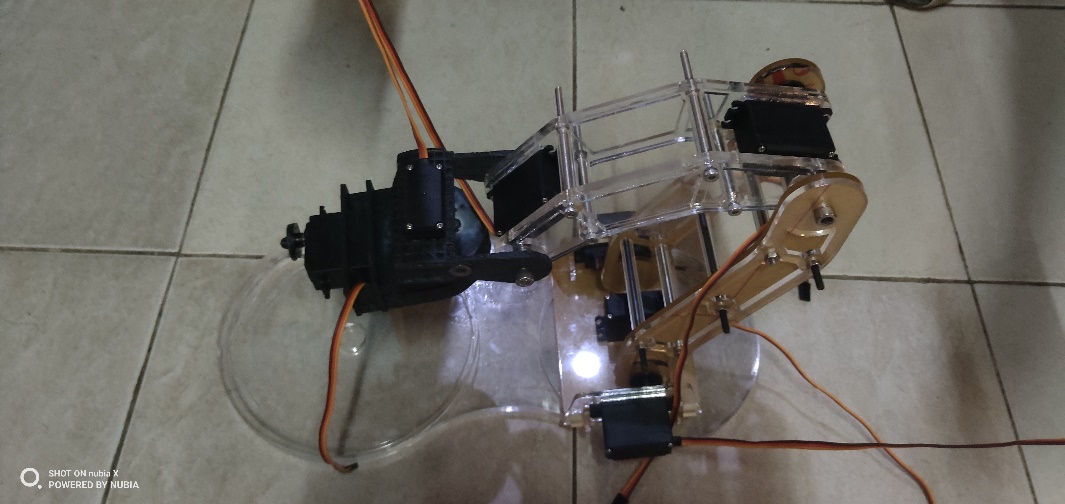
相关图片展示: