隧道地质检测辅助机械臂结构方案设计及验证毕业论文
2020-02-13 22:06:53
摘 要
机器人在现代工业生产制造的领域中的应用变得越来越普遍。尤其是工业机器人,正在逐步取代人工生产,慢慢成为了衡量一个国家的生产力的象征,成为一个国家科技水平和精密制造技术的标志。
本设计以工业机器人为原型,设计出一个隧道检测机械臂,本设计对工业机器人的传动机构进行了设计,对液压锤、机械手和液压钻进行设计和分析,对工业机器人的的驱动电机进行了计算分析和选型等,整个设计中对机器人的结构进行合理的分析,在材料的选择上应当使六自由度机器人具有比较高的强度和轻便的特性。本论文主要对隧道检测机械臂的驱动部位、各轴的传动方案和多功能分度盘上的液压锤、液压钻和机械爪进行了设计,并对驱动运动的电动机进行了选型;在对其工作空间分析的基础上,对关键的零部件进行了受力分析及强度校核;进行三维建模并对重点部位用simulation进行校核分析,用motion进行运动仿真分析,并用autoCAD绘制了隧道检测机械臂的装配图及部分关键零件图。
本论文的研究设计工作为隧道检测机械臂结构设计奠定了基础,同时也为相关的问题的研究提供了借鉴方法和经验。
关键词:隧道检测;机械臂,液压锤,机械爪,液压钻,三维建模
Abstract
Robots are becoming more and more popular in the field of modern industrial production and manufacturing. Industrial robots, in particular, are gradually replacing manual production, gradually becoming a symbol of measuring a country#39;s productivity and a symbol of a country#39;s scientific and technological level and precision manufacturing technology.
This design is based on the industrial robot and designed a tunnel detection robot. This design analyzes and designs the transmission mechanism of industrial robots, designs and analyzes hydraulic hammers, manipulators and hydraulic drills, and drives motors for industrial robots. The calculation and analysis and selection are carried out. The structure of the robot is analyzed reasonably in the whole design. The choice of materials should make the six-degree-of-freedom robot have higher strength and lighter characteristics. This paper mainly designs the driving side of the tunnel detecting robot arm, the transmission scheme of each shaft and the hydraulic hammer, hydraulic drill and mechanical claw on the multi-function indexing plate, and selects the motor for driving motion; On the basis of the analysis of the working space, the force analysis and strength check of the key components were carried out; the 3D modeling was carried out and the key parts were checked and analyzed, the motion simulation analysis was carried out, and the Assembly drawings and some key parts drawings of tunnel inspection robot arm was drawn by autoCAD.
The research and design work of this paper lays a foundation for the structural design of tunnel inspection manipulator, and also provides a reference method and experience for the study of related problems.
Key words: tunne l detection; mechanical arm, hydraulic hammer, mechanical claw, hydraulic drill, three-dimensional modeling
目 录
摘 要 I
Abstract II
第1章 绪论 1
1.1 背景 1
1.2 目的及意义 1
1.3国内外研究现状 2
1.4 本文研究主要内容 3
第2章 总体方案与传动机构原理 5
2.1 确定驱动系统 5
2.1.1驱动系统 5
2.1.2 确定驱动机型和运动自由度 5
2.1.3 驱动方式选择 5
2.2 机械臂的运动参数 6
2.3 各个关节的传动结构 7
2.3.1 腕关节的传动机构 7
2.3.2小臂的传动机构 8
2.3.3 大臂的传动机构 9
2.3.4 腰部的传动机构 9
2.4 液压锤原理 10
2.5 机械爪原理 11
2.6 钻机原理图 11
2.7 小结 11
第3章 运动学分析和数学模型 12
3.1 正向运动学及实例 12
3.2数学模型的建立 15
3.3 仿真运动曲线 17
3.4 小结 19
第4章 参数设计 20
4.1腕部参数设计 20
4.1.1 选择手腕电机 20
4.2 小臂的设计 22
4.2.1 小臂设计的总体要求 23
4.2.2 小臂电机的选择 23
4.2.3 选择小臂电机 24
4.3 大臂的参数设计 26
4.3.1 大臂设计的总体要求 27
4.3.2电机的选择 27
4.4 腰关节的参数设计 29
4.4.1腰关节参数设计的总体要求 29
4.4.2 腰部电机的选择 30
4.5 液压锤的参数 31
4.6 机械爪的设计 31
4.7 电钻选取 32
4.8 升降盘液压缸的选择 32
4.9 小结 33
第5章 设计与校核轴、螺钉 34
5.1 大轴1的结构设计与校核 34
5.1.1 大轴1的结构设计 34
5.1.2 大轴1的强度校核 35
5.2大轴2的结构设计与校核 37
5.2.1大轴2的结构设计 37
5.2.2大轴2的强度校核 38
5.3 小轴1的结构设计与校核 39
5.3.1 小轴1的结构设计 39
5.3.2 小轴1的强度校核 40
5.4 小轴2的结构设计与校核 41
5.5 回转底盘与腰部主轴连接的螺钉的参数校核 42
5.6 本章小结 42
第6章 总结与展望 43
参考文献 44
致谢 45
第1章 绪论
1.1 背景
近几年来,我国工程建设相关的技术日益成熟,再加上我国地势西部较高、东部较低,且山脉众多,很多线性工程往往无法避免要建设隧道,因此越来越多的隧道工程投入建设,跨度大、难度高的隧道数量也越来越多。我国在隧道工程方面取得了不小成就的同时也存在着一些难关亟需攻克,例如隧道施工时可能会遇到塌方、突泥、突涌等灾害,尤其是当这些灾害交叉发生时,问题会更加严重,通过隧道地质提前检测来减低灾害造成的损失就是解决这个难题行之有效的方法[1]。
另一个亟需解决的问题就是隧道作业中机器人的应用程度还不高,很多作业都需要人工去完成,不仅费时而且费力,同时还存在着对隧道工程人员的健康安全造成伤害的隐患。前些年,机械设备相对人工成本较高,且配件与维护费用昂贵,很多隧道工程都是使用人工去勘察地质,但随着隧道掌子面更大,隧道工程长度更长,隧道工程质量也越来越高、环保相关的要求也变得更高,加之近年来雇佣人力劳动的成本也越来越高[2],相反的,设计生产制造机器人的技术日益成熟,机器人相对于人工的优势又开始逐步呈现。人们对工程机器人的认识进一步深化,在考虑使用成本的同时也将其对恶劣环境的适应性加入考虑,开始觉得现代化机器人替代人工在危险、艰辛的恶劣环境下进行作业是未来的发展方向,因而隧道地质检测辅助机器人肯定会具有很广的市场前景,而隧道地质检测作为隧道工程施工前必须的项目也开始被考虑使用机器人来代替人工。
1.2 目的及意义
隧道工程是一个隐蔽的项目,经常受到各种不利地质体的影响。开挖前对地质条件的了解在隧道施工中起着重要作用。通过先进的隧道地质检测和预测手段,能够趁早发现可能存在的隐患,预测隧道作业中掌子面前方的不良地质体的位置、岩石结构的外貌和是否完整以及是否含有渗水,以便正确选择施工的地段,而且能够为优化原本的施工方案提供理论上的依据,除此之外还能及时提供隧道地质相关的信息,防止隧道在施工作业中发生渗水,泄漏瓦斯等可能发生的事故,使工程单位能够提前做好施工相关的准备。
由于隧道工程现场环境等原因,隧道工作不仅劳动量大,而且有时操作人员可能遭遇滑坡和渗水等危险。在关注和注重地质测试的准确性的同时,亟需研发现代化的应用于工程的机械和设备来取代人工进行作业,改善隧道施工人员的劳动条件。机器人在工程机械中的应用无疑为隧道施工领域指出了一条具有发展潜力的道路,机器人可以在相关工作中取代人类,避免工程人员因隧道塌方等事故而承受伤害,可大大降低工程事故带来的危害,保证施工现场安全.同时还可以节约大量人力成本。
但是,当前应用机械臂参与隧道地质检测时,还面临着几个问题。
首先,运动准确性的问题。机器人操作的准确性不如手动操作。事实上,运动的准确性在于技术上是如何准确地建模和解决工业机器人的运动学问题。
第二,工作稳定性的问题。机器人的关节理论上常常看作是一个点,但事实上,机器人的关节连接处有间隙,因此需要考虑运动时间隙对机器人平稳操作的影响。
第三,布局应该具有多样性。具体来说,如何考虑进行布局的设计,以快速适应各种不同的隧道。
第四,需操作简便易用。 机器人的操作,控制开关以及日常维护和维护等对于高级技术人员而言要求比不使用机器人的普通操作员更高的工资。 这需要机器人的教学以改善机器人的易用性。
综上所述,这次课题的目的和意义在于设计辅助检测隧道地质的专业机械臂,设计出动作准确,成本较低,适用性强的机械臂,填补隧道地质检测方面机器人应用的空缺,给隧道工程作业带来科学安全地施工、提高工程作业效率、缩短工程作业周期、避免或减低工程中发生事故造成的损失、节省工程资金等一系列的收益。
1.3国内外研究现状
在隧道工程中应用机器人技术无疑是这一领域的热门。事实上,国内、外工程技术专家,都一直致力在进行这方面的研究和探索,并取得了一定的成果,并开始逐步应用、推广到工程实践中。
例如,国外的研究团队设计了一个名为BADGER的隧道挖掘机器人,可以自动执行地下钻探,测绘和导航。受到蜗杆分段机构的启发,机器人BADGER被创造了通过万向节连接在一起的BADGER组件,该机器人的每个部件都装备有紧贴隧道的内壁的机械设备。该机器人前部是设计成一个钻头来进行挖掘,尾部是一台3D打印机,当BADGER挖掘地形时,通过安装在尾部是3D打印机打印出管道,BADGER装备了测量仪器(磁力计、加速度计和陀螺仪的组合)来测量其在地底相对于参考物体的位置。此外,探地雷达有助于检测和避让大型岩石和其他障碍物。电源线和数据线从机器人背面传输到地面控制单元,允许员工根据需要手动调整监控的进度和进行相关控制。此外,机器人后部的管形状的附件可以将土方从地底拉到地面。
以中国为例,中南大学何庆华教授领导的研究小组于20世纪80年代开始研究岩石钻探机器人,2000年,中国在国内首次开发了中国第一台隧道钻探机器人。隧道钻探机器人在整个施工项目中由计算机来实现自动定位和定向,计算机完成了钻探过程中各项输出的最优选择。它优化了凿岩的工作效率,并显著地降低了钻头,钻杆以及钻井设备的能耗和机械损失。使用此机器人进行钻孔操作,能够自动和精确地控制现场钻孔分布,孔序,孔深度,角度和位置,并能够解决多机器人和多任务动态分配的问题,以及确保隧道断面的准确性,并能减少因为机器人过多掘进和掘进不足造成的损失。与人工凿岩机械设备相比,不仅提高了工程质量和效益,而且提高了施工现场工作人员的安全性,减少了对周围岩石的破坏,大大改善了工作环境。
21世纪以来我国隧道工程越来越多,现代化机械装置替代人在繁重、艰苦的恶劣环境下作业是这一领域未来的发展方向,因而辅助隧道地质检测的机器人必然具有很广阔的市场。
1.4 本文研究主要内容
本文对隧道钻孔检测机械手的结构设计进行了研究。本文的主要内容如下:
- 阅读隧道检测设备相关书籍,确定各节点的传输方案。根据设计,采用一种简单的计算方法确定了两个臂的长度,以满足工作空间的要求。
- 设计了传动部件的连接方式以及结构,并用软件绘制了比较重要的零件的零件图和总装配图。
- 应用所学到的理论知识,根据机械手的参数来计算各关节的转动力矩和功率,翻阅机械设计手册,选择符合要求的驱动部件。
- 对主要传动部件进行了设计计算和校核。
隧道地质检测辅助机械臂实现的功能具体如下:
机械臂首先需要在隧道内壁钻孔,然后将钢钎锤入钻出的孔中,在钢钎上悬挂地质仪器,然后使用地质仪器检测地质,还可以使用液压锤去锤击隧道内壁,从而改变仪器测量的数据,通过分析多组数据,使得测量结论更准确,地质仪器可以根据需要选择,这里简单介绍下AGI-T3如何检测地质。
AGI-T3采用绕射扫描叠加与共反射面元叠加( CRS) 相结合的偏移技术进行三维成像,此方法避免了动静校正带来的误差,将属于同一菲涅尔带的弹性波叠加,增加了覆盖次数,提高了数据成像的质量。
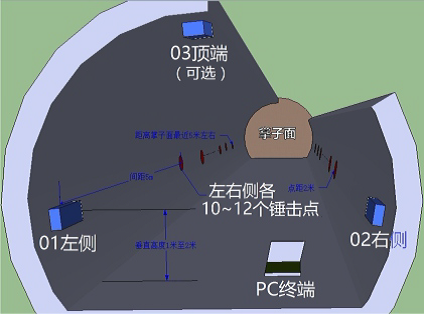
图1.1AGI-T3锤击位置
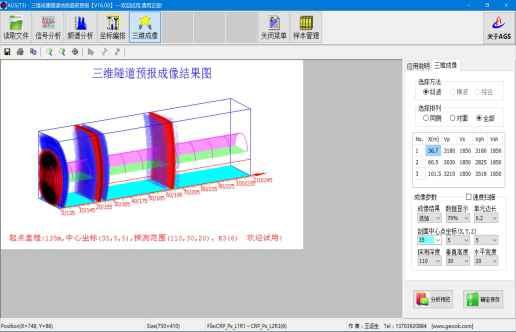
图1.2 AGI-T3 隧道三维成像图
通过使用AGI-T3能预报隧道三维图以及一些相关信号,分析它们就可以知道隧道地质情况,机械臂实际上也可以说是通过代替人工使用这些地质仪器来检测地质。
第2章 总体方案与传动机构原理



