基于S7-300PLC的立体仓库堆垛机升降机构控制系统设计毕业论文
2020-02-13 22:13:49
摘 要
在现代物流中,物流仓储正在高速发展,各个工业企业都开始采用自动化立体仓库来进行货物的存取。而自动化立体仓库的核心——堆垛机,是货物存取的关键。其性能的优劣,将直接决定立库的工作效率。本文工作内容如下:
对堆垛机以及立体仓库的历史与发展做了综述,分析了自动化立体仓库对现代物流业的意义,以及在未来的研究方向。
在查阅大量资料后,对堆垛机的重要机构进行了详细介绍,包括垂直起升机构、货叉以及安全保护机构等。
明确本设计需实现的功能,对堆垛机的控制系统进行设计,并进行PLC以及变频器的选型。根据任务需要完成堆垛机的硬件控制设计与软件控制设计,实现堆垛机升降机构的平稳高效运行。
最后对本设计进行经济环保性分析,说明本设计的实际意义,并进行总结及展望。
关键词:自动化立体仓库;堆垛机;编码器;货叉
Abstract
In modern logistics, logistics warehousing is developing rapidly, and various industrial enterprises begin to use automated three-dimensional warehouse to store goods. The stacker, the core of the automated warehouse, is the key to access goods. Its performance will directly determine the efficiency of the library. This design mainly introduces the composition and structure of the stacker, and studies the equipment selection and the software design of the control system. The contents of this paper are as follows:
This thesis summarizes the history and development of stacker and warehouse, and analyses the significance of automated warehouse to modern logistics industry, and the research direction in the future.
After consulting a lot of information, the important mechanism of stacker is introduced in detail, including vertical lifting mechanism, fork and safety protection mechanism.
After defining the function of this design, the thesis designs the control system of the stacker, and selects the type of PLC and frequency converter. According to the task needs, the hardware control design and software control design of the stacker are completed, and the stable and efficient operation of the lifting mechanism of the stacker is realized.
Finally, the economic and environmental protection analysis of the design is carried out to illustrate the practical significance of the design, and a summary and outlook are made.
Key Words:automatic warehouse; stacker; encoder ;fork
目 录
第1章 绪论 1
1.1 研究背景及意义 1
1.2 国内外研究现状 1
1.2.1 自动化立体仓库的历史与发展 1
1.2.2 堆垛机的历史与发展 2
1.3 本课题研究的目标及内容 4
1.4小结 5
第2章 堆垛机组成及介绍 6
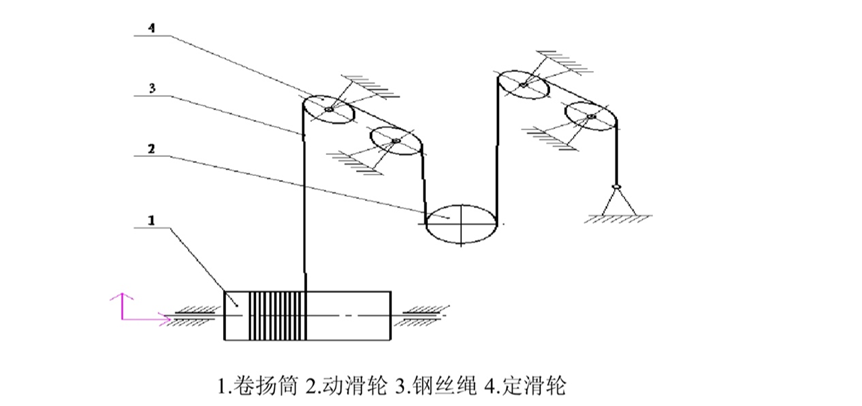
2.1 垂直机构 6
2.2 行走机构 7
2.3 货叉 7
2.4 载货台 7
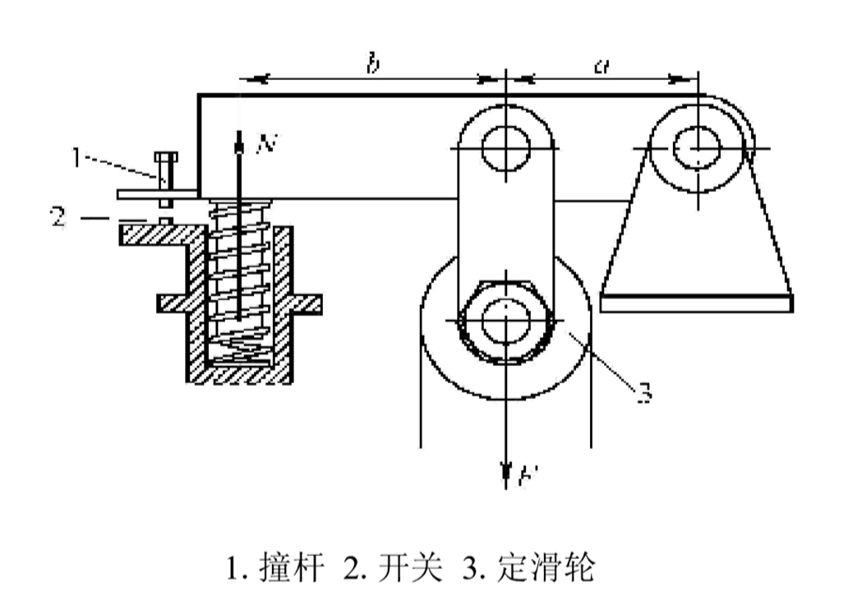
2.5 安全保护机构 8
2.5.1货叉限位保护 8
2.5.2电机联锁保护 8
2.5.3终端极限位保护 8
2.5.4断电保护 8
2.5.5超载保护 8
2.5.6货物位置异常检测 9
2.6小结 9
第3章 堆垛机控制系统总体方案设计 10
3.1 堆垛机功能分析 10
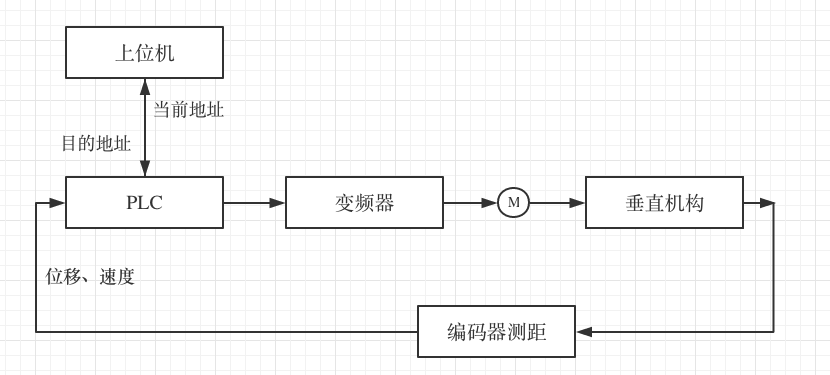
3.2 堆垛机控制系统介绍 10
3.3 PLC介绍及选型 11
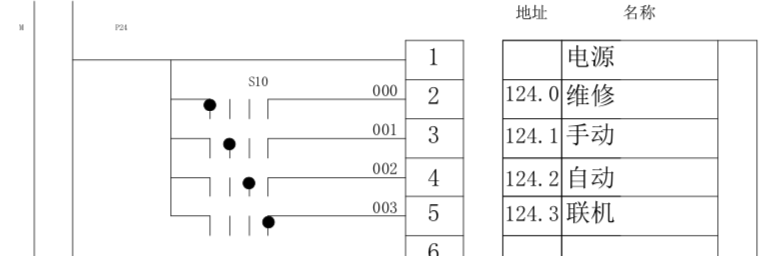
3.4 堆垛机认址方案设计 12
3.5 控制方法设计 13
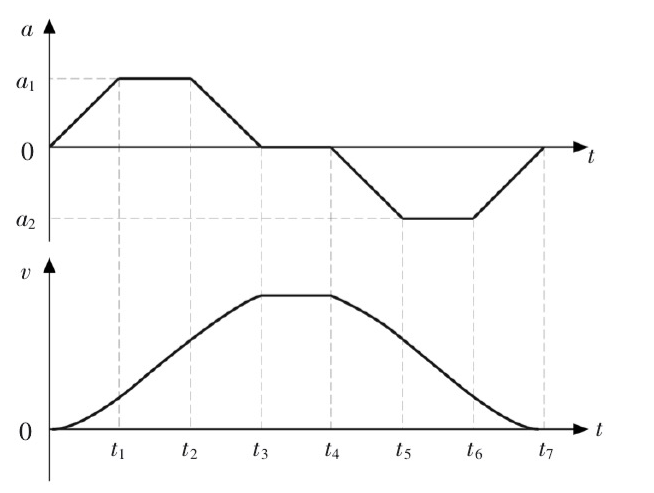
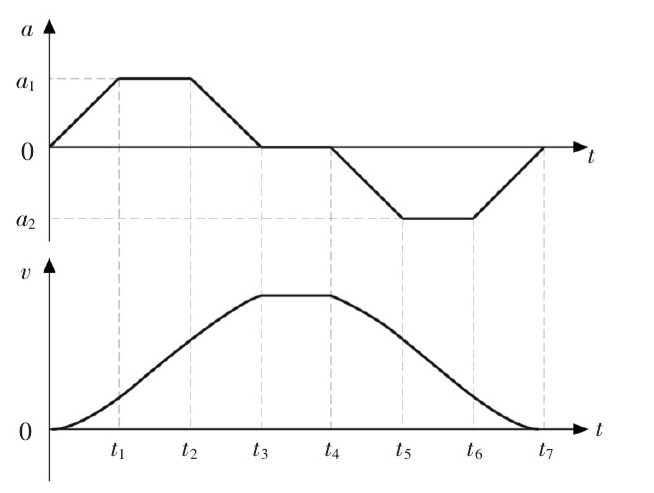
3.6 速度控制方法设计 13
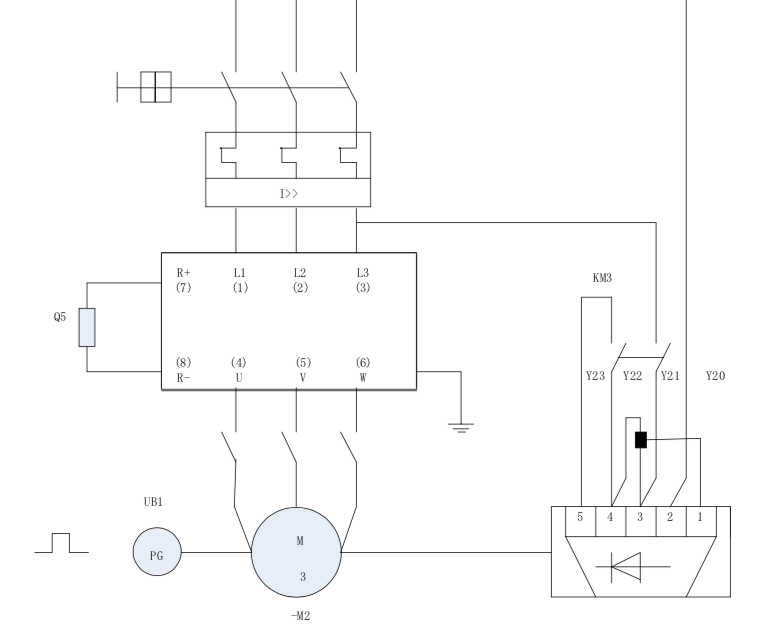
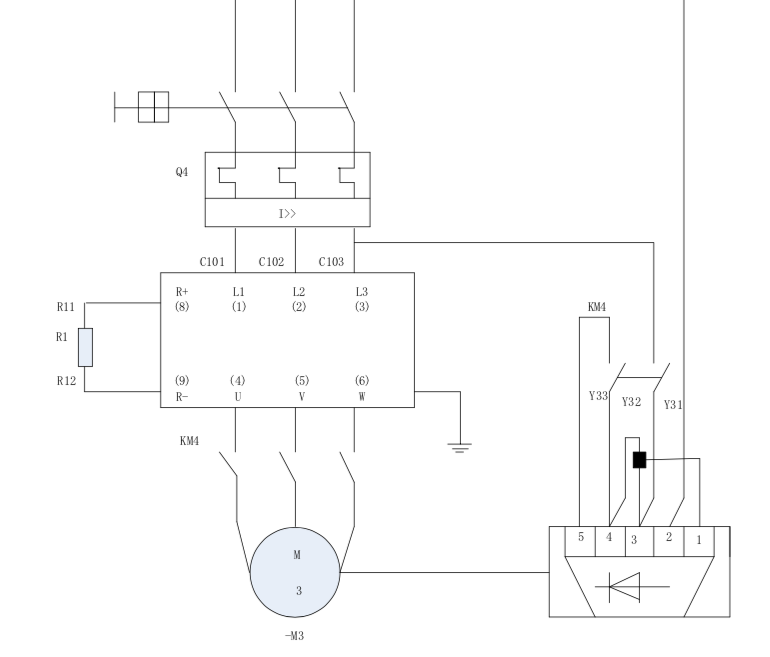
3.7 变频器选型 14
3.8小结 15
第4章 堆垛机控制系统硬件电路设计 16
4.1主电路 16
4.2控制电路 17
4.3行程开关与传感器 18
4.4指示灯 19
4.4小结 20
第5章 堆垛机控制系统的软件设计 21
5.1 堆垛机工作流程分析 21
5.2 系统软件设计要求 21
5.3 堆垛机控制梯形图分析 21
5.3.1升降标志位置设定 22
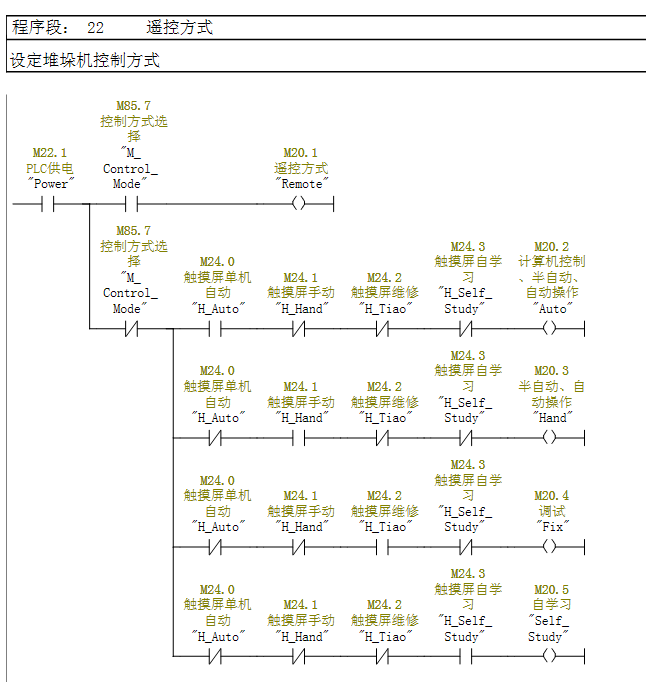
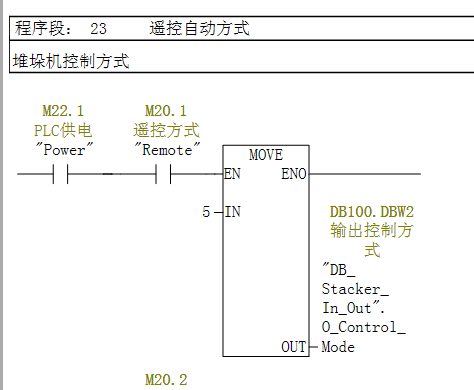
5.3.2堆垛机遥控方式 22
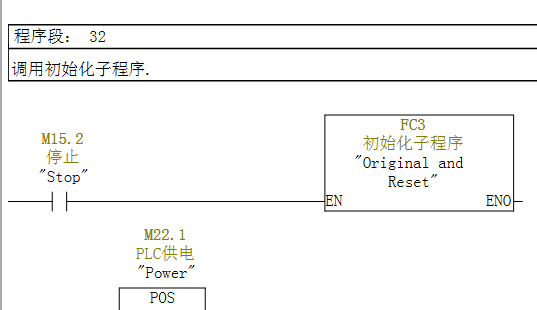
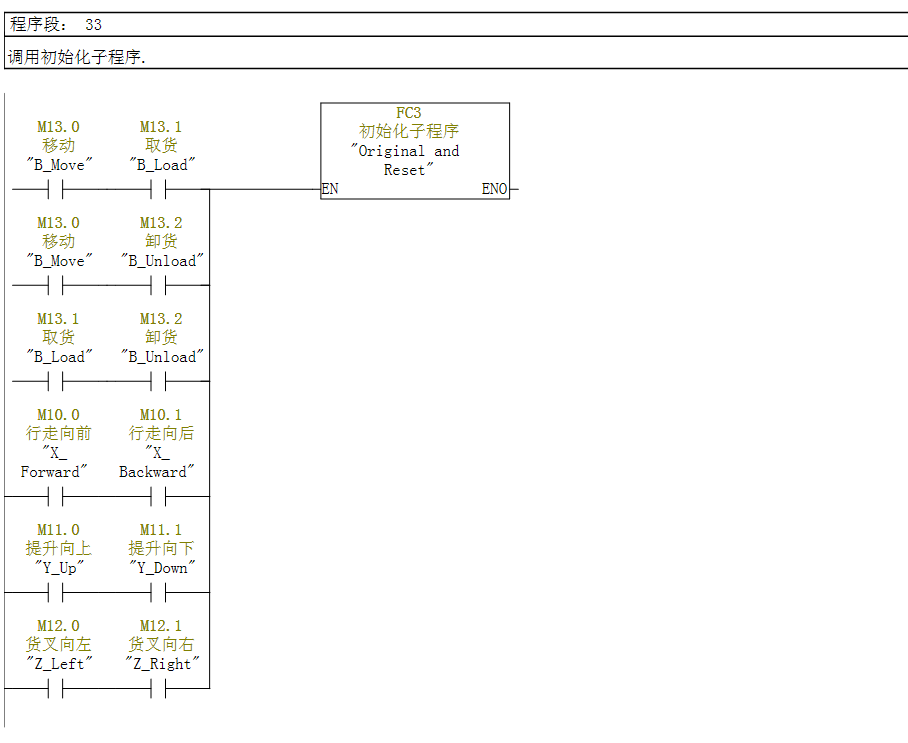
5.3.3初始化 24
5.3.4堆垛机返回原点 26
5.3.5堆垛机自动运行指令 27
5.3.6堆垛机半自动取货卸货 28
5.3.7垂直起升电机正转 29
5.3.8错误复位 30
5.4货叉控制梯形图分析 31
4.4.1货叉标志位置设定 31
5.4.2货叉回中 32
5.4.3货叉提升 32
5.4.3货叉制动 35
5.5速度模块 38
5.5.1提升编码器速度曲线 38
5.5.2垂直提升编码器强制减速 39
5.6提示设备 39
5.6.1蜂鸣器 39
5.6.2电源指示灯 40
5.7小结 41
第6章 经济性与环保性分析 42
第7章 总结与展望 43
7.1 研究总结 43
7.2 研究展望 43
参考文献 44
致 谢 45
第1章 绪论
1.1 研究背景及意义
自上个世纪90年代以来,中国物流业开始蓬勃发展,尤其是交通工具和计算机的发展大大加速了这一过程。随着科技的进步,物流自动化技术不断发展,而土地和人工成本的不断提高使得传统的仓库已经不能满足日益增长的物流需要,立体仓库的应用恰恰解决了这一问题。自动化立体仓库具有高精准度、高自动化、高空间利用率等特点成为我国发展现代物流的必要设施。
自动化立体仓库是以计算机控制系统为管理核心的多功能系统,立体货架、出入库输送系统、有轨巷道堆垛机、条码监测机、计算机控制系统是其重要组成部分【1】。而巷道式堆垛机作为自动化立体仓库系统中最重要的核心部件,是立库中取送货的重要部件。而现代的计算机技术更是赋予了立体仓库智能性,使之能自动的选取货物,提高了工作效率,降低了人工成本。因此,控制堆垛机的成本、提高其性能成为了现代物流环节的一大重点。
本文将以堆垛机为研究重点,结合西门子开发的PLC系统来实现堆垛机在垂直方向上的存取货物的操作。操作系统将由上位计算机控制,通过对下位运行机构的操作,来实现交流电机及变频器的控制,以达到堆垛机在垂直方向精确寻址的目的。并且每一次货物的调用信息都将储存在计算机内,以便工作人员的管理。
1.2 国内外研究现状
1.2.1 自动化立体仓库的历史与发展
随着现代物流的不断发展,立体仓库因其采用三维立体结构,所以具有节约仓库占地面积提高空间利用率的作用,并且由于立库中作业无需人工参与,因此具有作业安全,效率高的特点而被广泛的应用于各个领域【2】。也因此,自动化立体仓库受到国家的关注和大力支持。自动化立体仓库已经成为了现代物流、智慧物流中不可或缺的一部分。
自动化立体仓库是一种技术含量高、机电一体化的多层货架,并且专用于物流仓储出入库作业的仓库。国际上统一将其定义为:以巷道堆垛机为存取货物机构,配合其它出入库设备进行工作的高层货架,其组成机构由货架、AGV、传输带、巷道式堆垛机、控制系统以及计算机管理系统组成。
自动化立体仓库主要是实现仓储的立体化、三维化来节约占地面积、实现自动存储货物、减少人力消耗。自动化立体仓库在我国第一阶段发展始于上世纪八十年代,我国首部独立设计的有计算机控制的自动化立体仓库研制成功。该立体仓库高15m,在国家的支持下仅研发了15年。第二阶段在1986年,为初始阶段,主要是基于PLC控制系统的仓库储存系统,广泛应用于物流仓储、煤炭、钢铁、机械加工等市场,其应用超过200套。在2000年是,我国迈入高速发展阶段,联想公司开始涉足物流行业,研发了激光测距技术,并且将其运用到自动化物流系统,使市场在2005年时达到了500套。自2006年到2015年期间,我国已经拥有超过3000座立体仓库,同时它的发展速度也由原来的高速发展阶段进入了成熟应用阶段【3】。目前我国的自动化立体仓库的技术已经趋向成熟,开始在现代物流领域广泛运用,但与国外发达国家相比相比,在运行速度以及安全可靠性上仍有差距。
国外的自动化立体仓库是在北美洲最先发展起来的。1950年的美国最开始是采用手动控制的方式来操作桥式起重机。在1963年时,由于物流以及自动控制技术的快速发展,美国最先研制出由计算机控制全自动化运行的立体仓库。随着第三次工业革命的发展,土地成为珍稀资源,越来越的国家开始研究高层的立体仓库。到了1980年,地面支撑式堆垛机开始在全球范围内广泛使用。
直到现在现在,自动化立体仓库由库存管理、出入库、监控三大系统构成,来实现货物的存取、摆放的有序高效的管理。
在以后,自动化立体仓库将朝新的方向不断发展:
(1) 智能化。在第四次科技革命的催化下,计算机控制技术将会在自动化立体仓库中广泛应用,将仓库的作业效率提升到新的阶段以适应现代复杂的物流需求。
(2) 加强横向协作。在现代经济社会,由于场地、资金、人力高昂的成本,今后的企业应该协同作业,集中人力物力共同建设大型的自动化立体仓库,实现资源共享,将经济利益最大化。
(3) 高速化运转。为提高出入库效率,以后的自动化立体仓库将大力发展电气控制技术以求高速作业。
在未来,随着可编程逻辑控制器(PLC)控制系统以及微机搬运机器的不断发展,立体仓库将会广泛使用PLC联网控制,来提高立库的工作效率。将会出现可靠性更高、抗干扰能力更强的自动化仓库控制系统,并朝着智慧物流不断发展。
1.2.2 堆垛机的历史与发展
随着自动化立体仓库的广泛应用,我国对堆垛机工作性能的要求进一步提高。堆垛机作为立体仓库中最为重要的搬运设备,决定了整个系统的工作效率。它的行走起升速度,寻址精度,响应时间将会成为衡量工作效率的因子【4】。如何提升立体仓库的空间利用率,将会成为工程师设计过程中的一大难点【5】。
世界上最早的堆垛机是在20世纪中期的美国出现,它是在起重机上悬挂一个门架,利用手动操控他的前进和后退、旋转及提升【6】。发展到如今,巷道式堆垛机已经成为有轨式堆垛机机中应用最广泛的一种,它主要用于高层货架的取物作业,以地面双轨道为基础运行,将货物传送到指定的货架获或将指定货架上的物品取出。一般来说,堆垛机配有水平和垂直方向上的电机,以便其在三维空间自由活动【7】。据官方报道,国外研制的MINLOAD高速堆垛机在水平方向上的运行速度可以达到400m/min,在垂直方向上可达到150m/min,在精度方面可达2mm。
我国对堆垛机研究的迅猛发展始于1978年,在这之前我们主要使用巷道式堆垛机,在其机架上安装货叉来取货,通过调节丝杆来操控货叉的伸缩。直到如今,始巷道式堆垛机已经开始在我国大面积的使用【8】。据调查,2015年时我国的堆垛机生产技术就已经达到了世界前列,生产的堆垛机载重可达2T,最高水平运行速度可到200m/min,最高垂直运行速度可达50m/min,取货能力高达200次/h【9】。并且我国正在研究载重量超5T、高速运行、高性能的堆垛机。我国的自动化立体仓库在电器方面一般采用三相异步交流电机、变频器、PLC控制系统组合方式的控制结构。这种结构可以实现堆垛机的高精度、高稳定性、高速运行的目的【10】。但是在定位精度上仍落后于国外使用的伺服电机控制。从整体来说,国内自主生产堆垛机的技术已经有了较高程度的发展,但是国产的堆垛机配置的技术大多是防止国外的,例如RFID、变频调速、激光定位等,其硬件、软件随与发达国家的类似,但是更高性能的堆垛机技术仍需向发达国家学习【11】。
总的来看,有轨巷道式堆垛机是在立体仓库开始迈入机械化才开始逐渐普及,并且在其出现至今已经经历过了三个不同的阶段:
(1) 电动机控制模式:在1940年前后,堆垛机的控制主要是依赖电机的控制来实现变速控制。主流采用子母式电机和变极式电机两种电机相互配合的方式来进行速度的调整,来实现堆垛机垂直和水平运行时的高速和低速,到达垂直起升20m/min,水平行走100m/min。但是随着物流量的日益增加,以往的速度已经满足不了需求,于是通过对电机的电压调控实现了垂直起升速度达30m/min,水平行走达125m/min。当是由于堆垛机运行速度的提升,其制动时间同样延长了,并且在对电机电压进行变化时,切换速度过快,导致堆垛机产生大量的机械振动,为提高安全性和堆垛机使用寿命,必须增加堆垛机停止时间,导致堆垛机工作效率降低。
(2) 变频器控制模式:在1950年前后,为提高堆垛机速度控制的效率,变频器开始在堆垛机中应用,市面上主流的采用可编程逻辑控制器(PLC)、电机以及变频器组合的方式来实现堆垛机速度的控制。在变频器的控制下,堆垛机的水平行走速度达到了200m/min,垂直起升速度达到了50m/min,并且研发了变频器的专用控制器来实现堆垛机运行的梯形速度曲线,使速度控制变得更加的简单。同时,在控制系统中嵌入学习模块,大大提升了堆垛机运行的平稳度,同时提高了工作效率【12】。
(3) 伺服驱动器控制模式:在2000年前后,堆垛机开始应用伺服电机来提升堆垛机的使用性能,以往的旧模式--可编程逻辑控制器(PLC)、电机以及变频器组合的方式,无法实现速度和加速度的大幅提升,而私服驱动器和伺服电机的配合可以实现更高的速度和加速度。
在结构上,自动化立体仓库中的巷道开始采用天轨(安装在立库顶部)加地轨(安装在立库底部),堆垛机沿着天轨和地轨的轨道运行,从而提高堆垛机的运行速度、稳定性和精度。
立库的巷道又分为单巷道堆垛机和多巷道堆垛机。单巷道堆垛机只有一个巷道,并且堆垛机的运行轨迹为一条直线,所以堆垛机的作业效率高,但是由于每条巷道都需铺设轨道,因此成本也高。而多巷道堆垛机的运行轨迹不固定,并且为曲线,从而降低了成本,但是其工作效率却没有单巷道的高。
现在的堆垛机控制器一般采用可编程控制器(PLC)、单片机控制器、PCL配置的通讯模块控制【13】。由于在工业环境下,PLC控制器具有维护成本低、工作效率高、稳定性强的特点而被广泛使用【14】。一般来说,堆垛机寻址采用绝对认址和相对认址相结合的方式,但由于这种方法需要较多的认址片从而导致成本增加,所以本文采用编码认址的方法,既提高精准度同时降低成本。
目前发达国家主要研究堆垛机的可靠性以及运行速度。在现代物流日益发展的今天,我们对物流仓储提出了更高的要求。于是高稳定性、高效率的堆垛机成为今后堆垛机的发展方向。
1.3 本课题研究的目标及内容
本设计基于自动化立体仓库的有轨堆垛机控制系统,拟采用西门子S7-300来对立体仓库的堆垛机进行控制,并设计梯形图来进行垂直行走及定位【15】,主要研究堆垛机的垂直行走以及编码寻址【16】。
自动化立体仓库堆垛机的垂直行走及寻址需要合理分配PLC的I/O口【17】,并在软件上模拟运行。
由于在整个自动化立体仓库中,PLC梯形图的控制对于堆垛机的起升机构的运转至关重要。由此,在设计控制过程、梯形图绘制中必须考虑堆垛机的运行特点、自动化实现原理、硬件构成等。本设计着重对堆垛机的硬件和软件进行设计。
本设计研究内容如下:
- 介绍了堆垛机以及立体仓库的发展和研究现状综述。
- 详细分析了堆垛机的组成以及工作流程。
- 进行堆垛机控制系统的硬件电路的设计图。
- 根据堆垛机的生产工艺要求,确定设堆垛机升降机构控制系统的主要功能,并设计控制方案以及控制算法。
1.4小结
现代物流中,计算机控制已经成为了必不可少的技术支持模块,尤其是在“仓储、物流”等物流概念已经在社会广泛普及的情况下,自动化仓库成为未来物流发展的趋势。自动化立体仓库就是在现代物流中一个很好研究成果,其节约仓库占地面积、工作人员底劳动强度、高物流效率、有效的信息传递等特点使物流真正的与现代计算机技术相结合。在传感器技术、机电技术、通讯技术的支持下,具有高复杂性、高自动化的堆垛机在自动化立体仓库开始广泛应用。其高稳定性、控制方式的灵活性大大的提高了自动化立体仓库工作效率。可编程逻辑控制器(PLC)是一种以计算机技术、自动识别技术、自动控制技术为基础发展出来的微型控制装置。其具有高稳定性、维护成本低、适应性强等特点在自动化立体仓库中被广泛应用。
本章主要研究调查了自动化立体仓库、堆垛机以及PLC的发展历史,明确论文的研究目的及其研究方法,为整篇论文打下基调。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: