MQ4035门座式起重机起升和行走机构控制线路设计毕业论文
2020-02-13 22:22:23
摘 要
随着全球经济大发展,物流在全球经济中的地位越来越重要,甚至已经成为经济发展中至关重要的一环,而本文的主要研究的对象门座式起重机随着如今港口物流的快速发展而发展,门座式起重机的智能化与自动化发展已经成为大势所需,在如今的发展趋势下,PLC技术与变频调速技术相结合来对门座式起重机进行控制使其运行更加平稳、高效。本文主要完成了以下研究设计内容:
(1)通过阅读查看相关资料熟悉MQ4035门座式起重机的工艺要求、PLC硬件结构和PLC编程方法来对起升机构和行走机构的传动方案以及PLC控制线路进行设计分析,并通过掌握绘图软件对MQ4035门座式起重机的控制进行设计。
(2)本次设计研究分析了门座式起重机的供电系统、配电保护系统、驱动系统、PLC控制系统和监控系统,并同时对控制系统的整体进行设计,这些研究为MQ4035门座式起重机的控制系统设计提供了理论基础。
(3)本次设计还着重对起重机的主电源电路、起升机构和行走机构的电路进行了设计,分析了起升机构和行走机构电路设计的要点,同时分别对门座式起重机的控制方式和调速方式进行了分析比较,详解了门座式起重机电气控制系统和变频调速系统的特点,并对MQ4035门座式起重机的控制系统进行了设计。
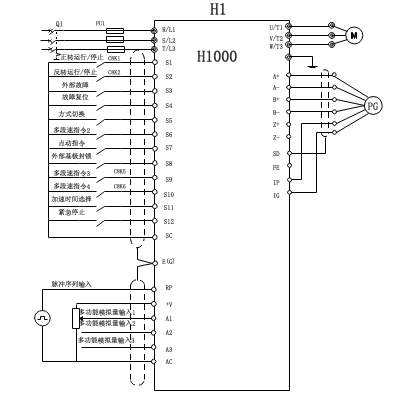
(4)本次设计分析了控制系统的相关组成和PLC的选型方法以及原则,并在对各种型号PLC进行了对比后选定了西门子S7-300PLC和CPU 315-2DP。同时对MQ4035门座式起重机的变频调速系统进行了设计,分别介绍了变频调速系统和变频器的选型方法以及原则,在对各种型号变频器进行了对比后选定了安川H1000变频器。设计了起重机的起升机构和行走机构的变频器控制电路,分析了起升机构和行走机构变频器调速设计的要点。
(5)在电路设计完成之后本文针对MQ4035门座式起重机的起升机构和行走机构进行了PLC程序编程。
关键词:PLC;变频器;门座式起重机;自动化控制
Abstract
With the development of the global economy, logistics has become more and more important in the global economy, and has even become a vital part of economic development. The main research object of this paper is the rapid development of port logistics. With the development and development, the intelligent and automatic development of portal cranes has become the trend. Under the current development trend, PLC technology and variable frequency speed control technology are combined to control the portal crane to make its operation more stable and efficient. This paper mainly completed the following research content:
(1) Read the relevant materials familiar with the process requirements of the MQ4035 portal crane, PLC hardware structure and PLC programming method to design and analyze the transmission scheme of the lifting mechanism and the traveling mechanism and the PLC control circuit, and master the drawing software to design the control of the MQ4035 portal crane.
(2) This design study analyzes the power supply system, distribution protection system, drive system, PLC control system and monitoring system of the portal crane, and simultaneously designs the overall control system. These studies provided a theoretical basis for MQ4035 portal cranes.
(3) This design also focuses on the design of the main power circuit of the crane, the hoisting mechanism and the circuit of the traveling mechanism, and analyzes the key points of the circuit design of the hoisting mechanism and the traveling mechanism, and simultaneously controls the gantry crane and the speed regulation method was analyzed and compared. The characteristics of the electric control system and the variable frequency speed control system of the portal crane were explained in detail, and the control system of the MQ4035 portal crane was designed.
(4) This design analyzed the relevant components of the control system and the selection method and principle of the PLC. After comparing the various types of PLCs, the Siemens S7-300PLC and CPU 315-2DP are selected. At the same time, the frequency conversion speed control system of MQ4035 portal crane was designed. The selection method and principle of frequency conversion speed control system and frequency converter were introduced respectively. After comparing various types of frequency converters, the Yaskawa H1000 frequency conversion was selected. The hoisting mechanism of the crane and the inverter control circuit of the traveling mechanism are designed, and the main points of the speed regulation design of the hoisting mechanism and the traveling mechanism are analyzed.
(5) After the circuit design is completed, the PLC program is programmed for the hoisting mechanism and the traveling mechanism of the MQ4035 portal crane.
Key Words: PLC; frequency converter; portal crane; automatic control
目 录
第1章 绪论 1
1.1 研究背景 1
1.2 国内外现状 2
1.3 本文研究内容 3
第2章 门座式起重机简介 4
2.1门座式起重机组成 4
2.1.1 起升机构 4
2.1.2 行走机构 4
2.1.3 回转机构 4
2.1.4 变幅机构 4
2.3 门座式起重机控制系统组成 5
2.3.1 供电系统 5
2.3.2 配电保护系统 5
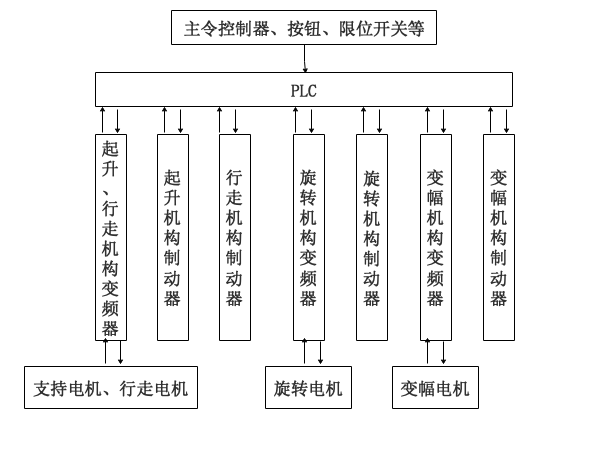
2.3.3 驱动系统 5
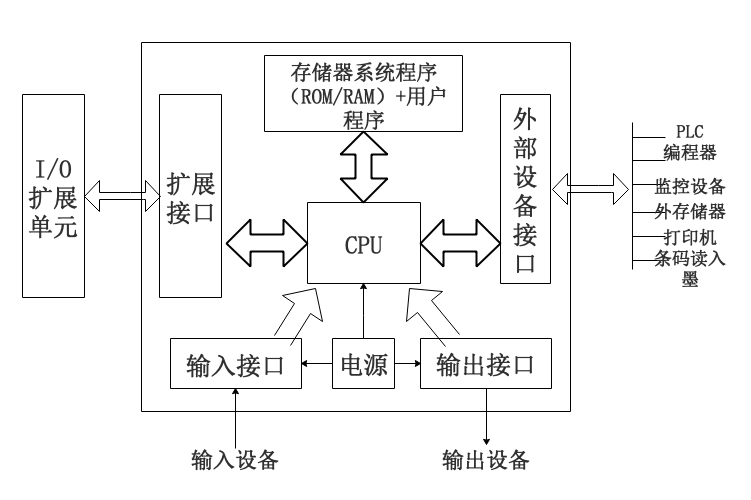
2.3.4 PLC控制系统 5
2.6 本章小结 6
第3章 门座式起重机控制系统硬件电路分析与设计 7
3.1硬件电路组成 7
3.1.1 PLC选型 7
3.1.2 变频器选型 9
3.2 控制系统电路设计 11
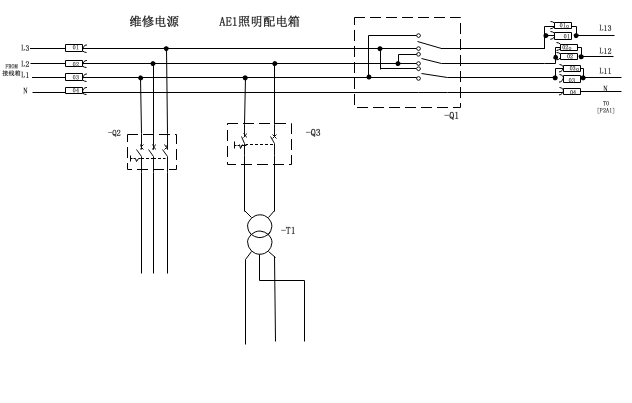
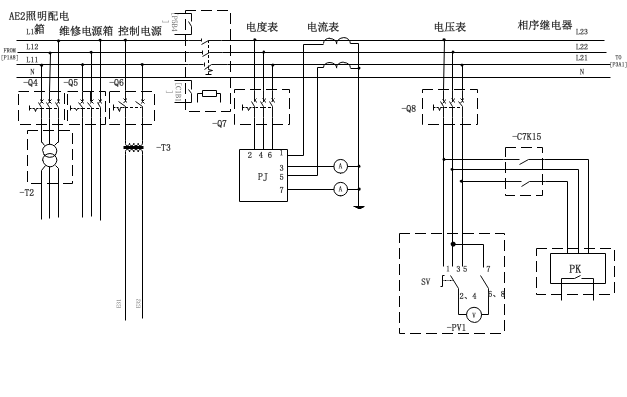
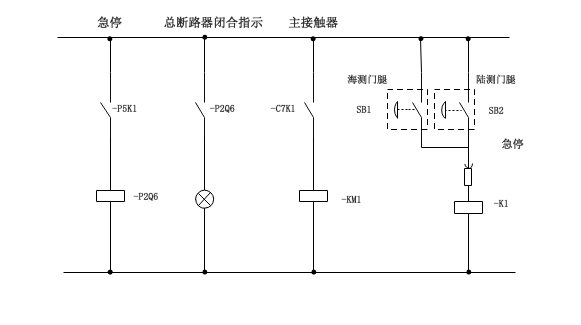
3.2.1 电源电路设计 11
3.2.2 起升机构电路设计 13
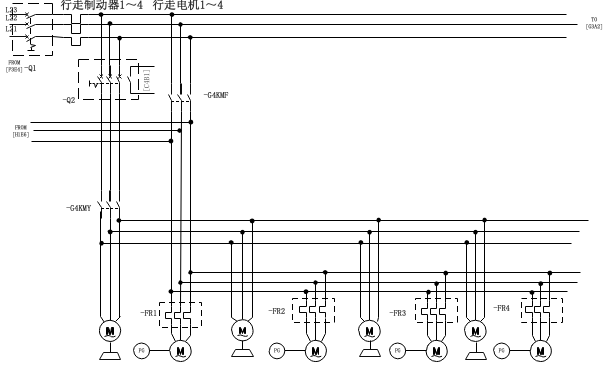
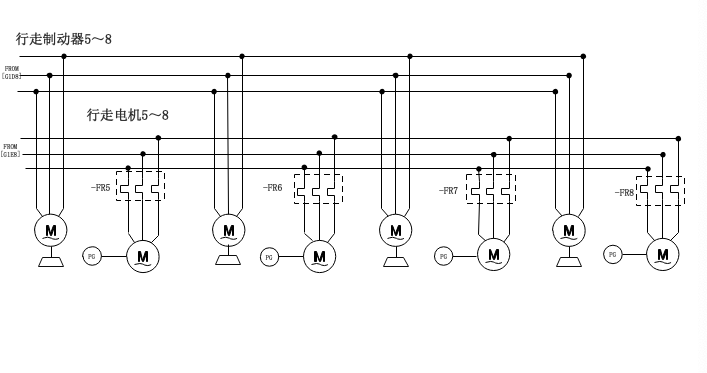
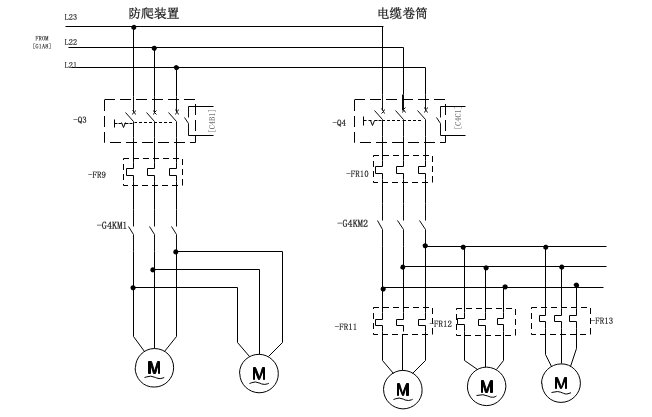
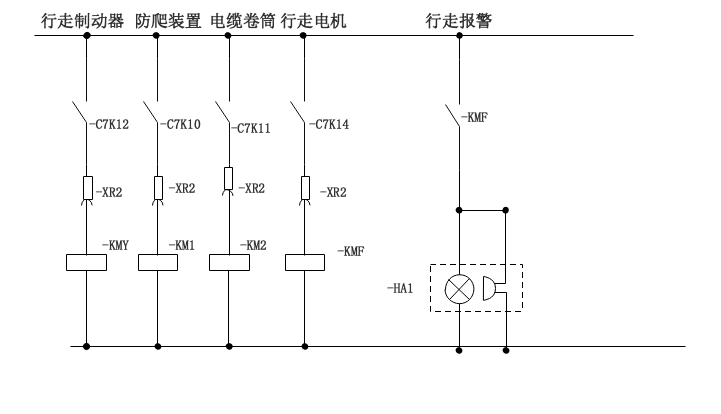
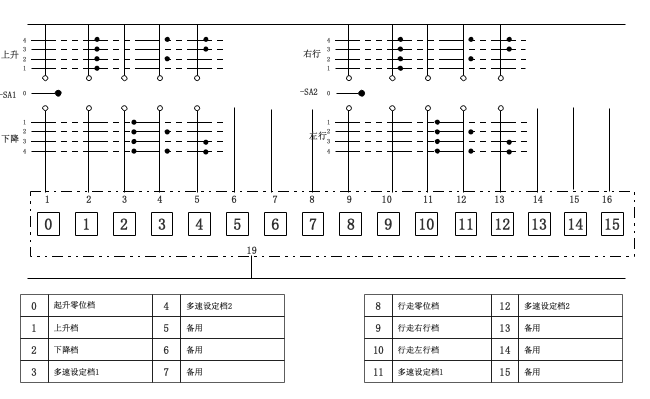
3.2.3 行走机构电路设计 15
3.3门座式起重机变频调速系统设计 17
3.3.1 变频调速系统 17
3.3.2 起升机构变频调速 18
3.3.3 行走机构变频调速 21
3.4 本章小结 21
第4章 门座式起重机控制系统PLC程序设计 22
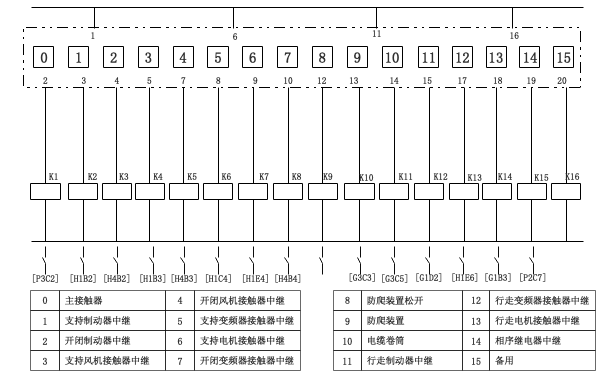
4.1 PLC I/O配置 22
4.2 行走机构PLC程序设计 24
4.3起升机构PLC程序设计 31
4.4 可行性分析 44
4.5 本章小结 45
第5章 总结与展望 46
第1章 绪论
研究背景
随着全球经济的不断发展,物流在世界经济全球化中所起到的作用与地位越来越重要,而在近几年的物流发展中,港口物流出现的频率越来越高,港口主要是将港口海岸的优势加以利用,发展涵盖物流产业链所有环节特点的服务体系,它是一种综合物流体系,港口物流也成为一个国家地区的经济高速发展的催化剂,辐射周围的区域和城市,对现代物流有着极为重大的影响。而在港口物流中,港口机械起到至关重要的作用,为习惯现代运送技术的开展,特别是针对如今的船舶大型化对于港口机械要求的提高,港口机械设备的设计也愈加重要,对设计的要求也越来越高。本课题研究的是MQ4035门座式起重机的起升以及行走机构的控制线路设计,门座式起重机随着港口发展而发展,门座式起重机按用途可以分为装卸用门座式起重机、造船式门座式起重机以及建筑安装用门座式起重机,本课题研究的MQ4035起重机属于装卸用门座式起重机,该起重机拥有四大机构,分别是起升、回转、变幅和运行机构,起升、回转和变幅机构安装在转动部分,转动部分除了这三个机构以外还有倾斜单臂架或组合臂架和司机室,剩下的运行机构在门座式起重机的门座下部来对起重机的运行工作的位置进行调整。门座式起重机主要用来在港口进行装卸、搬运,它的成本低以及作业能力强使得门座式起重机的应用越来越广泛,它的自动化和智能化愈加重要,也因此逐渐成为大势所趋[5]。
在传统的门座式起重机的控制系统设计中通常采用接触器和继电器相结合的控制方式和转子串联切电阻的调速方式,这种传统的控制和调速方式有极大的弊端,继电器在长期磨损和持续工作的条件下容易发生磨损且继电器的触点易产生电弧甚至可能会相熔而产生重大失误,同时采用切电阻的调速方式虽然简便但是其无法在长期负荷的条件下持续工作且启动转矩和调速范围较小。这些缺点决定了传统的控制调速方式在日渐自动智能化的今日无法继续采用,因此随着科学技术的迅速发展,如今的门座式起重机开始采用一种全新的控制调速方式即使用PLC技术与变频器技术相结合来进行控制,在门座式起重机的控制中采用PLC与变频器进行控制调速可以将调速精确化且可使控制平稳化,同时这种全新的控制方式还具有高效节能的特点,这更符合如今绿色工业的发展趋势。[6]本课题所研究的对于起重机起升以及行走机构的控制线路的设计主要就是利用PLC技术以及变频技术来对起重机进行控制调速,在门座式起重机中应用变频器以及PLC技术可以对起重机的速度进行精准调控并可以使起重机的启动和制动过程较为平稳且高效节能的特点使它在经济高速发展的如今拥有极大的运用价值[1]。
国内外现状
世界范围内的起重机行业在近几十年内发生了极大的发展变化,随着全球经济的高速发展和世界生产规模的不断扩大化,目前起重机的自动化程度不断提高,起重机在当下的生产中应用范围和作用越来越大,起重机所需要的技术要求也越来越高,也因此全球对于起重机械的技术设计的竞争也愈加激烈,如今,全球起重机械的主要生产国为美国、日本、德国、法国等,美国、日本和德国一直列于前列,现代起重机技术在逐步发展,国外的起重机发展趋势主要为起重机的大型化、工艺方法联合化、控制与操作技术智能话等,在本课题主要研究的起重机的自动化控制方面,针对电控方面主要开发调速和电控系统,其优点是开发性能好且成本低、可靠性高,用来发展半自动以及全自动操纵,并且开始采用机电仪液一体化的技术,使起重机的电控方面的可靠性能增加,例如在德国,为了解决起重机构的吊钩的防摆控制,德国方面发展了模糊逻辑电路的控制技术,这种技术主要可以运用神经信息和模糊技术寻找加速的最佳时间。在国外的ABB集团方面,集团的起重机驱动装置部将控制系统应用于起重机上,它使起重机配备了集装箱定位与消摆控制系统,利用载荷位置传感器将起重机的具体位置进行准确测定。而在西门子公司方面,西门子公司正在逐步改进探索以研发的起重机数字控制系统,使之完善并拥有维护简单、控制系统通信可靠并且数据采集方法领先于全球。西门子公司的系统主要运用PLC连接开关、司机室控制装置与驱动装置使控制系统可以及时地根据货物载荷以及起重机机构速度的改变而相应地优化起重机的运行作业性能[19]。
随着我国经济的快速发展和科学技术的进步,尤其是在近几年中国的工业技术的快速发展之下,我国对于物流的要求和需求越来越高,随之而来的是我国起重机所面临的改进变革的需求的增加。
如今在起重机的控制设计方面,自动化以及智能化已成为起重机械的主要的发展趋势,目前的起重机技术主要是将传统机械原理与先进的电子技术结合,主要是将计算机技术、光纤维技术技术、电力电气技术等相结合来提高起重机驱动与控制系统的自动智能化。在过去,对于采用调节转子电阻的电气控制方式已设计了一系列标准,而在变频调速上,我国起步较晚,但是随着国内科学技术和经济实力的迅猛发展,我国在起重机自动化方面的研究逐步加强,越来越多的起重机采用变频器与PLC相结合的自动化控制方式。如今,我国基本在起重机的控制方面均采用的是以微处理器为核心的电气传动技术,这种技术使起重机的调速制动性能有了极大得提高。利用PLC对起重机的运行实现自动控制,PLC系统是现下我国起重机自动控制最常用的控制系统。在电气传动方面,如今的起重机主要的传动类型为变频控速、双速电机控速、直流控速、转子串阻控速和定子调压控速等,在这些电气传动的方式之中,变频控速是使用最为广泛以及最优的方式。
我国在起重机控制设计领域的发展主要是向着系列化和模块化、智能化和集成化发展。随着我国起重机设计的逐步成熟,PLC技术和变频驱动技术与起重机的联系越发紧密,起重机的控制逐步向自动化和智能化发展。
近几年我国针对起重机自动控制方面有了诸多新的进展,例如王彪团队针对起重机控制系统所存在的位移检测、数据通信和自动控制方面的问题提出了基于旋转编码器的位移检测,在用西门子PLC S7 300和MM440变频器同步控制起重机的同时增加EM277模块实现全自动控制[4]。在起重机吊点定位控制方面,黄翼团队研制了利用多圈绝对值编码器和电子罗盘获取数据并同时通过MCU对这些数据进行处理,依靠自适应以及模糊神经算法从而增强起重机吊点定位控制技术,使之更加精准可靠[16]。而在解决起升电机和开闭电机协调性不足的问题上,陈蕴基教授团队在控制系统中利用PLC技术和变频器技术与上位机结合控制[17]。在保证和提高设备的可靠性的方面,郝明佳也同样将PLC技术与变频器技术相结合控制起重机[18]。
如今我国国内的起重机自动化水平相较之于其他发达国家还有较大差距,但是随着我国科学技术的进步和自动化行业的发展,我国正在逐步缩小与其他在起重机自动化技术上处于领先位置的发达国家之间的差距,起重机自动化水平正在迅速提升。
本文研究内容
本文主要是通过运用PLC技术以及变频器技术的结合来对MQ4035门座式起重机的起升以及起升机构进行设计,通过熟悉被控对象的工艺要求,在此基础上确定电气设计的技术条件并同时熟悉和掌握PLC硬件结构、编程指令和编程方法,对PLC程序进行编程,并同时对起升和行走机构传动方案进行分析与设计以及对起升和行走机构PLC控制线路的分析与设计。本论文的设计研究具有显著的实用意义,主要研究内容如下:
(1)主要对门座式起重机及其控制系统的研究背景和国内外现状进行介绍。
(2)主要是对门座式起重机的总体系统进行分析,分别对起升机构和行走机构进行介绍。
(3)主要是进行了门座式起重机的控制系统的硬件电路设计,分析了PLC技术和变频器技术,并对PLC和变频器进行了选型。
(4)根据门座式起重机的作业流程进行了起升机构和行走机构的梯形图程序设计,以实现门座式起重机平稳可靠运行。详细介绍了对门座式起重机的控制系统的PLC程序设计。
主要对本次的毕业设计进行了总结和展望。
第2章 门座式起重机简介
2.1门座式起重机组成
门座式起重机主要由四个机构组成,它们分别是起升机构、旋转机构、变幅机构和行走机构,其中起升、旋转和变幅机构装在起重机转动部分上,而行走机构装在门座下部。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: